









Optuna在8月18日發佈了最近的 v4.5版,加入了GPSampler的約束多目標優化功能,我們來看看這個新的功能。
基於高斯過程的貝葉斯優化(GPBO)最近幾年在材料科學、機器學習等領域應用很廣。GPSampler最初設計時就想做一個簡單好用的GPBO實現。雖然在定製方面(比如核函數、獲取函數)沒有BoTorch和Ax那麼靈活,但GPSampler勝在速度快,依賴少。
早期版本的GPSampler支持的問題類型比較有限,但是經過團隊持續改進。v4.2版本加入了不等式約束支持,v4.4版本實現了多目標優化。現在v4.5直接支持約束多目標優化了。
這個功能在很多實際場景中都很有用,比如説:材料科學、機器學習、藥物發現這些領域經常需要在物理約束或實驗限制下平衡多個目標。Optuna v4.5的約束多目標GPBO直接解決了這個需求,可能會推動相關領域的研究進展。
安裝和基本使用
GPSampler需要額外安裝幾個依賴包:
$ pip install optuna==4.5.0
# scipy和torch對於GPSampler也是必需的。
$ pip install scipy
$ pip install torch --index-url https://download.pytorch.org/whl/cpu安裝完成後,使用起來很直接:
import optuna
def objective(trial: optuna.Trial) -> tuple[float, float]:
x = trial.suggest_float("x", -5.0, 5.0)
y = trial.suggest_float("y", -5.0, 5.0)
c = x**2 + y**2 - 4.0
trial.set_user_attr("c", c)
return x**2 + y**2, (x - 2) ** 2 + (y - 2) ** 2
def constraints(trial: optuna.trial.FrozenTrial) -> tuple[float]:
c = trial.user_attrs["c"]
return (c,)
sampler = optuna.samplers.GPSampler(constraints_func=constraints)
study = optuna.create_study(sampler=sampler, directions=["minimize"] * 2)
study.optimize(objective, n_trials=100)多目標優化的技術實現
GPSampler的多目標優化採用了Expected Hypervolume Improvement (log EHVI)的對數形式作為獲取函數。這個實現主要基於Daulton等人[1]的方程(1)和Lacour等人[6]的算法2。
幾個關鍵的技術改進都體現在相關的PR中:
PR #6039實現了盒分解算法,大幅提升了超體積改進計算的速度。PR #6052引入了基於準蒙特卡羅的log EHVI實現。PR #6069則在GPSampler中正式加入了多目標優化功能。
盒分解算法帶來的性能提升相當明顯。相比原生的實現,速度提升了6到800倍,讓四目標問題的優化變得可行。雖然整體思路和BoTorch的實現接近,但具體實現細節有些不同。
在多目標優化基礎上,GPSampler現在可以處理不等式約束了。這部分參考了J. Gardner等人[3]和M. Gelbart等人[4]的方法。
系統同時為目標函數和約束函數建立GP模型,不過暫時忽略了它們之間的相關性。PR #6198實現了約束log EHVI,PR #6224則完成了約束多目標優化的完整支持。
約束處理的核心是用Probability of Improvement (PI)來評估候選點的可行性。最終的獲取函數就是EHVI和可行性概率的乘積。
性能測試對比
為了驗證約束多目標優化的效果,團隊做了詳細的基準測試。主要對比了幾種情況:
一是和不考慮約束的多目標GPSampler比較,看約束處理帶來的好處。二是和Optuna中已有的TPESampler、NSGAIISampler對比,這兩個也支持約束多目標優化。
測試環境設置
測試問題選擇了C2-DTLZ2,這是OptunaHub新加的約束多目標優化基準問題。設置為2個目標,3個變量。
每次優化跑300輪試驗,用5個不同隨機種子重複測試來計算標準誤差。由於C2-DTLZ2是確定性問題(目標函數沒有噪聲),GPSampler開啓了
deterministic_objective=True選項。
測試機器配置:Arch Linux系統,Intel Core i9-14900HX處理器(24核32線程,最高5.8GHz),Python 3.11.0。
帕累託前沿質量對比
圖1展示了不同算法獲得的帕累託前沿分佈。
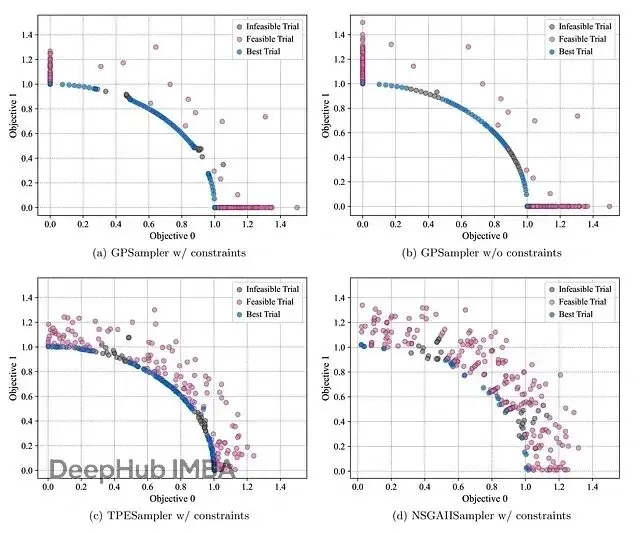
圖1. 300次試驗後C2-DTLZ2問題的獲得帕累託前沿。結果顯示約束GPSampler(如(a)所示)與無約束GPSampler(如(b)所示)和TPESampler(如(c)所示)相比,有效地減少了不可行區域中的浪費評估(灰色着色),而NSGAIISampler(如(d)所示)在300次試驗後仍遠未收斂。
約束處理的效果很明顯
C2-DTLZ2問題故意在帕累託前沿上設置了不可行區域,專門測試算法處理斷開帕累託前沿的能力[5]。雖然不考慮約束也能找到一些帕累託解,但會在不可行區域浪費很多評估次數。
對比約束版GPSampler(圖1a)和無約束版本(圖1b),約束版本在可行帕累託解(藍色點)之間產生的不可行觀察(灰色點)明顯更少。説明約束處理確實起作用了,減少了無效評估。
和其他採樣器的比較
相比TPESampler(圖1c),GPSampler(圖1a)在不可行區域的浪費評估也更少。不過TPESampler在某個目標值接近零的帕累託前沿區域覆蓋得更全面一些。
這主要是GP獲取函數的特性導致的——傾向於在邊界附近過度採樣,降低了那些區域的不確定性,但也讓進一步探索相鄰帕累託前沿變得困難。
NSGAIISampler的表現就比較一般了(圖1d),300次試驗後還沒收斂,找到的最優解很少。
收斂速度分析
圖2的可行超體積歷史更直觀地展示了各算法的收斂表現。
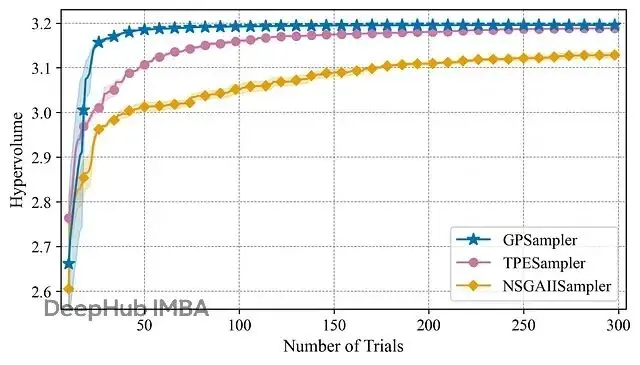
圖2. C2-DTLZ2問題[5]的可行超體積歷史。實線表示均值,陰影區域表示標準誤差,兩者都是在具有不同隨機種子的五次獨立運行中計算的。約束GPSampler(藍色)與TPESampler(粉色)和NSGAIISampler(黃色)相比,實現了更快的收斂到更高的超體積值,證明了新功能在減少評估成本方面的有效性。
GPSampler的超體積增長曲線很有意思。不到50次試驗就達到了TPESampler的最終水平,比NSGAIISampler領先得更多。這種快速收斂對計算成本高的優化問題特別重要——減少函數評估次數就是直接節省時間。
總結
Optuna v4.5的GPSampler約束多目標優化功能確實是個不錯的更新。C2-DTLZ2基準測試證明了幾點:減少了不可行區域的無效評估,可行超體積收斂比TPESampler和NSGAIISampler都快。
這讓Optuna在處理計算昂貴的黑盒優化問題時更有競爭力了。如果你的項目涉及約束多目標優化,值得試試這個新功能。
參考文獻
[1] Daulton, S., Balandat, M., and Bakshy, E. Differentiable expected hypervolume improvement for parallel multi-objective Bayesian optimization. In Advances in Neural Information Processing Systems, volume 33, pp. 9851–9864, 2020.
[2] Deb, K., Thiele, L., Laumanns, M., and Zitzler, E. Scalable test problems for evolutionary multi-objective optimization. In Evolutionary Multi-objective Optimization, pp. 105–145. Springer-Verlag, 2005.
[3] Gardner, J., Kusner, M., Zhixiang, W., Weinberger, K., and Cunningham, J. Bayesian Optimization with Inequality Constraints. In Proceedings of the 31st International Conference on Machine Learning, volume 32, pp. 937–945. PMLR, 2014.
[4] Gelbart, M. A., Snoek, J., and Adams, R. P. In Proceedings of the 30th Conference on Uncertainty in Artificial Intelligence, pp. 250–259. AUAI Press, 2014.
[5] Jain, H., and Deb, K. An Evolutionary Many-Objective Optimization Algorithm Using Reference-Point Based Nondominated Sorting Approach, Part II: Handling Constraints and Extending to an Adaptive Approach. In IEEE Transactions on Evolutionary Computation, 18(4):602–622, 2014.
[6] Lacour, R., Klamroth, K., and Fonseca, CM. A box decomposition algorithm to compute the hypervolume indicator. Computers & Operations Research, volume 79, pp. 347–360, 2017.
https://avoid.overfit.cn/post/2223f043ade548cc8a33494b8eae6331
作者:Kaito Baba

