
不確定性下的電動靜液作動器 魯棒控制-EXP-魯棒控制-EHA
實驗目的
摘要:
針對 EHA 系統參數不確定性及泄漏、摩擦非線性問題,基於 QFT 設計魯棒位置控制並引入補償方法,實驗驗證了系統跟蹤性能的顯著提升。
關鍵詞:
- EHA
- 電動靜液作動器
- 魯棒控制
- 靜液驅動
- QFT
注:本文僅從實驗系統與工程實現角度進行記錄。
實驗系統整體結構
下圖為根據實驗內容整理的系統結構框圖。
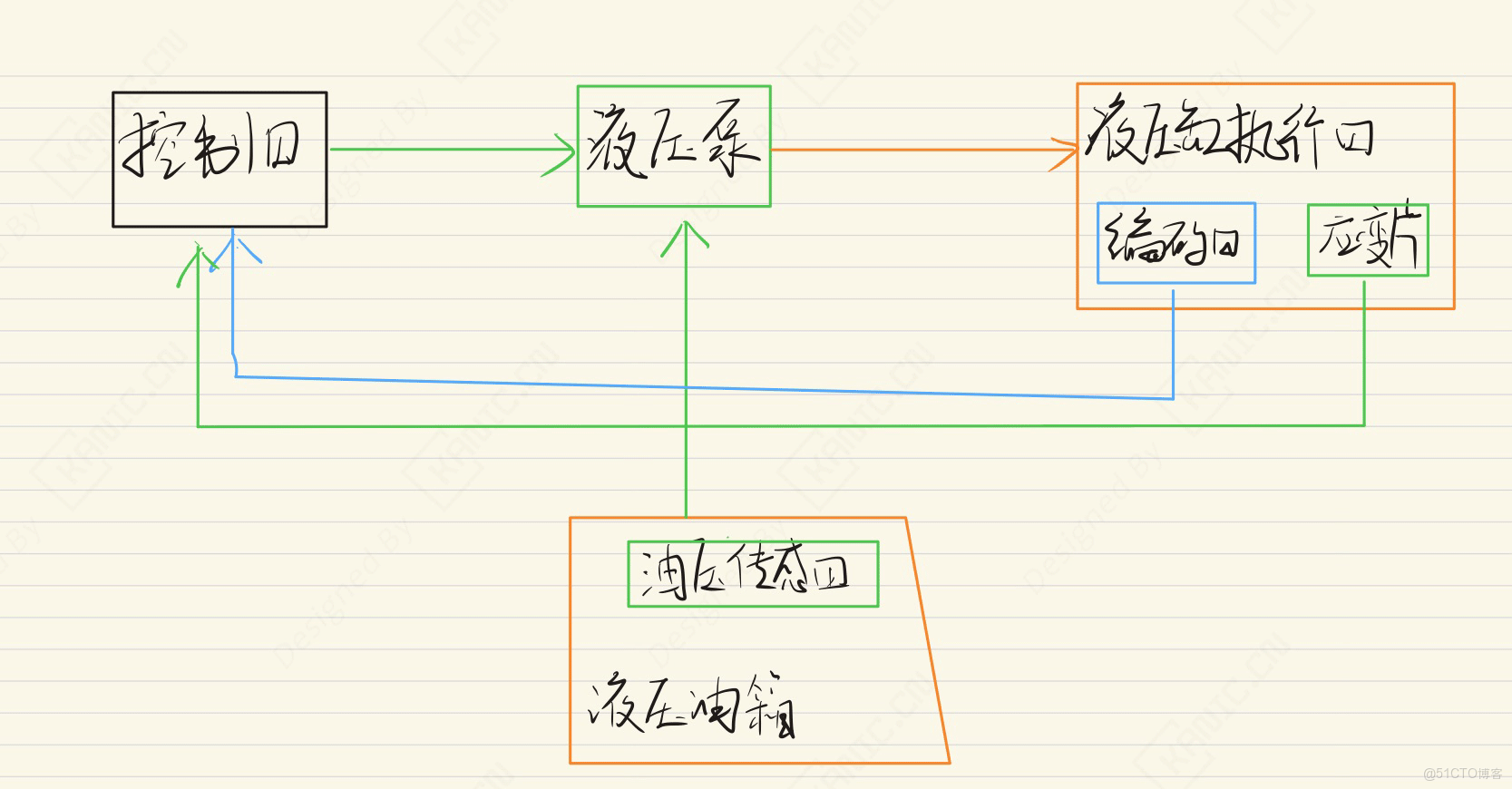
關鍵信號與實驗流程説明(精煉版)
- 控制器發送位置指令給電機。
- 電機接收指令並旋轉,驅動液壓泵。
- 液壓泵將電機的旋轉轉化為液壓流量和壓力。
- **液壓缸(執行器)**接收液壓流量產生位移,推動負載。
- 執行器上的編碼器測量活塞位移,反饋給控制器。
- 執行器上的壓力傳感器測量液壓缸內壓力,反饋力信息。
- **Tank(油箱)**儲存液壓油,緩衝系統壓力波動。
- 油箱壓力傳感器監測油液壓力,確保系統健康與穩定。
説明:僅記錄信號在系統中的流向與作用,不涉及控制算法或具體參數。
實驗數據與現場

説明
結構框圖來源於實際實驗平台驗證後的通用實現形式,細節根據具體硬件版本略有差異。
涉及的部分硬件
- 伺服電機 Teknic M-4650
- 液壓泵 Parker F11-005
- 液壓缸 Parker D1FP
- 編碼器 Heidenhain ROD 420
- 液壓馬達/泵 Parker F11-005
- 液壓油箱壓力傳感器 Honeywell PX3
- 應變片式壓力傳感器 MeasureX MRA25
以上配置僅用於説明實驗背景,不同應用場景下可採用等效方案。
交流説明
本文僅記錄一種可復現的實現方式,不同應用場景下會有不同取捨。如果你對其中某個環節(傳感器 / 控制算法 / 實驗結構)感興趣, 歡迎交流不同的實現思路。