

在過去的十餘年中,智能交通與自動駕駛技術的發展被普遍視為人工智能落地應用最具代表性與最具挑戰性的領域之一。人們對自動駕駛的期待不僅僅是“解放雙手”,更是寄希望於其能夠顯著提升道路利用效率,並最後推動社會出行方式的根本變革。然而,當我們深入考察現有的自動駕駛方案時,一個不容迴避的現實逐漸顯現出來:單車智能正在觸碰其發展的瓶頸。
自動駕駛的決策過程高度依賴感知,而感知本質上是車輛與環境之間的信息交互過程。現有的傳感器技術——無論是激光雷達的精準點雲,還是毫米波雷達的強魯棒性,亦或是攝像頭的高分辨率語義信息——都不可避免地受到物理條件的制約。例如,當前方有大型貨車遮擋視野時,後方車輛的傳感器無論多麼先進,都難以洞察前方的交通態勢。這種侷限性在城市道路、十字路口以及交通複雜場景中表現得尤為突出。換言之,單車智能的“局部最優”並不等價於系統整體的安全最優。
正因如此,車聯網(Vehicle-to-Everything, V2X)理念隨之產生,並逐漸成為國際智能交通研究的焦點。通過車車通信(V2V)、車路協同(V2I)、車人交互(V2P)以及車雲融合(V2C),車輛不再是孤立的決策體,而是能夠依託信息共享形成一種“羣體智能”(Collective Intelligence)。這種智能的最大優勢在於,它能夠打破單車的物理侷限,實現信息在更大範圍內的感知與預測。然而,新的問題也隨之而來:信息的異質性與通信資源的有限性如何兼顧?
在多模態感知體系中,車輛不僅需要處理來自攝像頭、雷達、激光雷達等多源傳感器的數據,還可能接收到鄰近車輛的局部視野信息。這些數據有不同的統計特性、噪聲模式與時空分佈,直接進行融合極易導致冗餘與衝突。同時,V2X 網絡的帶寬和延遲始終受限,若在每一個時間步都傳輸全量的原始數據,不僅難以實時響應,還會造成通信擁塞,甚至誘發新的安全隱患。換言之,如何在“信息豐富”與“資源有限”之間尋求動態平衡,成為多車協同決策必須解決的核心難題。
面對這一難題,學界與工業界已經展開了多種嘗試。早期的研究往往集中於特徵級融合,即通過壓縮算法或注意力機制,從原始感知數據中提取出最具代表性的部分進行共享。然而,這種方式在動態交通環境中往往表現不穩,尤其是在模態缺失或通信中斷的情況下,性能顯著下降。另一些研究則將焦點轉移至決策級融合,通過交換高層語義信息(如預測軌跡或碰撞風險)來實現協同。但這種方式會損失部分底層感知細節,導致全局決策缺乏充分依據。由此可見,單一層面的融合策略並不能完全滿足未來車聯網的需求。
與此同時,知識蒸餾(Knowledge Distillation, KD)這一深度學習領域的經典方法,為解決上述問題提供了新的視角。知識蒸餾最初用於大模型向小模型的知識遷移,其核心思想在於通過“教師模型”與“學生模型”的配對訓練,使輕量化模型在性能上接近複雜模型。在車聯網環境中,這一思想具有天然的適配性:我們完全可以將全局的多模態信息整合為一個“教師”,再將其壓縮為緊湊的知識表徵,以較低成本傳遞給各個“學生”車輛。這不僅避免了冗餘通信,還能在部分模態缺失時保持較高決策性能。換言之,知識蒸餾為多車協同提供了一種**“低帶寬下的高效知識共享”**機制。
在此背景下,論文《MMCD: Multi-Modal Collaborative Decision-Making for Connected Autonomy with Knowledge Distillation》提出了一種全新的框架——MMCD。該框架並非僅是地在已有方法上進行改良,而是將多模態融合與知識蒸餾有機結合,在“全局感知—局部執行”的思路下,建立起一種高效、魯棒、可擴展的協同決策體系。其貢獻可以歸納為三個方面:
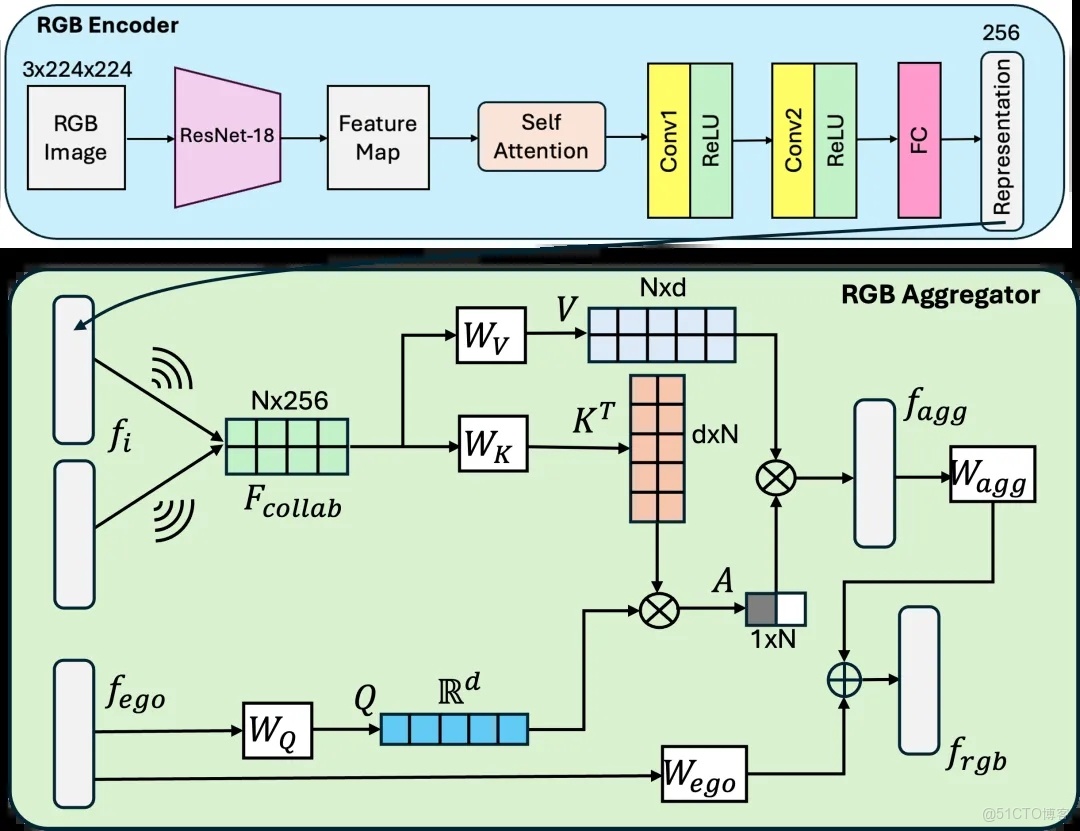
- 多模態層次化融合:通過引入圖神經網絡與注意力機制,既保證單車內部的感知完整性,又捕捉跨車之間的全局關聯。
- 跨車知識蒸餾:利用教師-學生結構實現全局知識的高效傳遞,大幅降低通信開銷,同時提升模態缺失下的魯棒性。
- 實時性保障:通過選擇性傳輸與邊緣計算策略,將複雜計算分佈在車端與路側單元之間,從而滿足毫秒級決策需求。
這些設計不僅在實驗中顯著優於現有方法,還展示了實際部署的可行性。在羣體智能系統中,知識的壓縮與共享是否可以看作一種“社會化學習”機制?在交通之外,這種方法是否能夠推廣至無人機羣、智能工廠甚至多機器人協作場景?
綜上,MMCD 框架的研究並非侷限於某一交通應用,而是站在智能體協同與知識遷移的交叉點,提供了一種具有普適意義的解題思路。它所回答的,不僅是自動駕駛的技術瓶頸,更是羣體智能系統如何在不確定環境中實現高效協作與知識共生這一更宏大的科學命題。
1. 多模態協同決策的基本定義
在自動駕駛與車聯網研究領域,決策(Decision-Making) 一直被視為最高層次的智能行為,其性能直接決定了車輛在複雜交通場景中的安全性與效率。長期以來,大多數研究集中在 單車感知—單車決策 的閉環架構上,即依賴自車的傳感器輸入,經過感知、預測與規劃,再輸出控制指令。這種方式雖然邏輯清晰、實現簡潔,但受限於感知範圍與局部視野,其魯棒性難以在高風險場景下得到保障。
與之形成鮮明對比的是,多車協同(Collaborative Autonomy) 的提出,使得車輛能夠突破單一視野的侷限,通過通信共享形成更全面的環境認知。在這一框架下,每輛車不僅是決策主體,同時也是信息提供者。這意味着個體車輛的決策不再是孤立的,而是受到羣體知識的引導與約束。
進一步而言,多模態協同決策(Multi-Modal Collaborative Decision-Making, MMCD)則在此基礎上引入了新的內涵:
- 多模態性(Multi-Modal):車輛不再僅依賴某一類傳感器,而是融合 RGB 圖像、激光雷達點雲、雷達信號等多源輸入。每一種模態都藴含不同層次的信息,例如 RGB 提供豐富的語義與紋理,LiDAR 提供精準的幾何與深度,毫米波雷達提供強魯棒的速度與距離感知。
- 協同性(Collaboration):不僅模態間需要融合,車輛間也需要共享。即使某一輛車的傳感器受限,其決策仍然可以藉助鄰車的模態信息得到補償。
- 決策性(Decision-Oriented):不同於傳統的多傳感器融合(Multi-Sensor Fusion, MSF),MMCD 的目標不僅是提升感知精度,更是直接優化 最後決策輸出。
這種思想可以用一個形式化表達來描述: 設車輛 


其中 



其中 



這一公式凸顯出 MMCD 的兩個本質特徵:
- 決策依賴於 本地模態 與 協作模態 的聯合。
- 模態融合直接服務於動作生成,而非僅是服務於中間感知任務。
因此,MMCD 與傳統的多傳感器融合形成了層次上的區別。前者着眼於 決策層的協同最優,而後者主要侷限在 感知層的多源融合。
2. 多模態協同決策與多傳感器融合的關係
要理解二者關係,需要從信息流與建模層次加以區分。
2.1 多傳感器融合的定義與目標
多傳感器融合(Multi-Sensor Fusion, MSF)強調的是 信息層次的整合。其基本思想是:

其中 

MSF 的主要目標在於:
- 提升感知精度(如檢測率、跟蹤精度);
- 彌補單一模態缺陷(如視覺在夜晚衰減,LiDAR 在雨霧下性能下降);
- 在冗餘性下增強魯棒性。
其典型應用包括目標檢測、語義分割、軌跡預測等。換句話説,MSF 的 終點是感知任務的優化。
2.2 多模態協同決策的定義與拓展
MMCD 並不止步於感知層,而是將多模態信息與協同機制引入到 決策優化 中。區別在於:

其中:
表示模態融合函數;
表示跨車協作機制(如 Cross-Attention、GNN 聚合);
表示決策模型(如 MLP 控制器)。
這種建模方式表明,MMCD 與 MSF 的關係並非並列,而是 包容與擴展:
- MSF 解決的是“如何在單車內部融合不同模態”;
- MMCD 解決的是“如何在多車之間共享多模態融合的結果以優化決策”。
2.3 核心區別與聯繫
- 目標不同:
- MSF 注重局部感知精度;
- MMCD 注重全局決策性能。
- 層次不同:
- MSF 位於感知層;
- MMCD 位於決策層,且吸納感知結果。
- 機制不同:
- MSF 主要通過特徵拼接、加權、注意力實現;
- MMCD 結合了圖結構建模、知識蒸餾、跨模態信息壓縮等方法。
- 聯繫:
- MSF 是 MMCD 的前提與基礎,沒有高質量的模態融合,決策協同難以保證;
- MMCD 則推動 MSF 從感知任務向決策任務拓展。
2.4 關鍵問題
如果 MSF 的目標僅僅是最大化感知精度,那麼在信息共享受限的情況下,它並不能保證全局決策的最優性。例如,在紅綠燈遮擋的場景下,單車的 MSF 再準確,也無法避免“信息盲區”。此時,只有 MMCD 的跨車協作與知識蒸餾機制,才能保證車輛在局部信息缺失下仍然做出安全合理的決策。
因此,MMCD 可以被視為 MSF 在車聯網環境下的升級形態。它並非否定 MSF,而是將其嵌入到更高層次的協作決策框架中。
3 多模態協同決策的核心機制與建模框架
多模態協同決策(Multi-Modal Collaborative Decision-Making, MMCD)不僅是傳感器數據簡單的融合過程,而是涉及信息表徵、跨模態互補性挖掘、分佈式學習與協作優化的系統性框架。其核心思想在於利用不同模態的異質性,構建出比單一模態更為穩健的決策能力,從而應對高度複雜與動態不確定的自動駕駛與多智能體場景。
3.1 多模態信息表徵與嵌入
在自動駕駛場景中,常見的模態包括:
- 視覺模態(Camera):提供高分辨率的語義與環境紋理特徵;
- 激光雷達模態(LiDAR):提供精準的幾何結構與三維點雲信息;
- 雷達模態(Radar):在惡劣氣候條件下具有強魯棒性;
- 車聯網模態(V2X Communication):提供非視距的先驗交通信息。
為了實現模態間的協同,需將各模態數據映射到一個共享的表示空間:

其中,





這種方式不僅實現模態間的統一表示,還為後續的決策層融合提供基礎。
3.2 協同感知與互補性利用
單一模態通常受制於感知盲區或噪聲干擾,例如視覺模態在光照不足時性能退化,激光雷達在遠距離稀疏點雲下的精度下降。多模態協同的關鍵在於互補性利用:
- 互補強化:不同模態在時空分辨率、魯棒性和信息覆蓋範圍上具有差異,融合能夠提升感知完整性。
- 冗餘增強:同一場景由多模態同時描述時,冗餘信息提升系統在異常情況下的穩定性。
- 置信度加權:通過模態置信度建模,可實現動態加權融合:

其中,

3.3 協同決策的層級架構
MMCD 的決策過程不僅侷限在感知融合層,更是一個跨層級的分佈式決策優化過程。典型的層級架構包括:
- 局部層(Local Layer):單車基於自身傳感器與模態融合,形成局部狀態估計與初步決策策略。
- 協作層(Collaborative Layer):車輛間通過 V2X 通信交換表徵或中間決策,形成全局一致性優化。
- 決策層(Decision Layer):通過強化學習(RL)或分佈式規劃算法實現全局任務最優。
例如,在強化學習框架下,協同策略可建模為:

其中,



3.4 知識蒸餾與跨模態蒸餾在協同中的作用
在多模態環境下,直接融合所有模態可能帶來巨大的計算開銷。因此,引入知識蒸餾(Knowledge Distillation, KD)與跨模態蒸餾(Cross-Modal Distillation, CMD),以實現高效決策:
- 單模態教師 – 多模態學生:利用性能最優的模態作為教師,蒸餾給學生模型:

其中,

- 跨模態蒸餾:模態間互為教師與學生,使得弱模態在訓練中吸收強模態的信息,從而提升在關鍵場景下的泛化能力。
- 分佈式蒸餾:在多車協作下,車輛間不僅交換感知結果,還可共享蒸餾後的知識,以提升整體羣體智能水平。
3.5 算法複雜度與通信代價分析
多模態協同不可避免地帶來額外的計算與通信代價。設 

- 計算複雜度:

其中 
- 通信複雜度:若車輛共享嵌入向量,則代價為:

因此,如何在保證性能的同時降低複雜度,是 MMCD 實際應用中的關鍵挑戰。論文中通過知識蒸餾技術減少了冗餘模態的直接傳輸,僅保留蒸餾後的輕量知識表示,顯著降低了通信與計算負擔。
4 意義與應用前景
4.1 對智能交通的推動
MMCD 框架的提出為自動駕駛帶來了以下突破:
- 安全性提升:通過跨車協同,避免了單車視野盲區帶來的交通風險。
- 經濟性提高:知識蒸餾機制降低了硬件算力與帶寬需求,使得中低端車輛也能具備協同智能。
- 可擴展性增強:該框架可自然拓展至多車隊列與城市級車聯網系統。
4.2 工業應用
- 高速公路自動駕駛車隊:車隊協同決策可減少交通擁堵與追尾。
- 智慧城市交通管理:結合路側單元,形成“車-路-雲”一體化智能調度系統。
結論
論文《MMCD: Multi-Modal Collaborative Decision-Making for Connected Autonomy with Knowledge Distillation》提出了一種突破性的多模態協同決策框架,充分利用知識蒸餾實現了高效、低延遲、魯棒的車聯網智能。其核心貢獻在於:
- 通過多模態感知與圖神經網絡實現跨車全局感知;
- 通過知識蒸餾大幅降低通信與計算成本;
- 在多種仿真與真實數據集上驗證了其優越性。
可以預見,MMCD 將成為未來智能交通與車聯網系統的重要基石,推動自動駕駛由“單車智能”向“羣體智能”轉變。
參考文獻
Liu, R., Wang, Z., Gao, P., Shen, Y., Tokekar, P., & Lin, M. (2025). MMCD: Multi-Modal Collaborative Decision-Making for Connected Autonomy with Knowledge Distillation. arXiv preprint arXiv:2509.18198. https://arxiv.org/abs/2509.18198


