









在數字孿生技術席捲工業、基建、智能製造等領域的今天,“三維模型”早已不再是簡單的視覺複製品。當我們談論一台挖掘機的數字孿生體時,我們需要的不僅是精準的剷鬥弧度、逼真的金屬漆質感,更需要它能像真實設備那樣響應操作指令——剷鬥隨控制參數俯仰,動臂按工程邏輯升降,履帶根據工況切換運動狀態,甚至能模擬完整的“挖土-轉運-傾倒”作業流程。
這一切,正是圖觀模型編輯器為數字孿生開發者帶來的核心能力。
一、從“靜態模型”到“數字孿生體”:圖觀模型編輯器的核心價值
傳統三維模型(如FBX、GLB格式)往往停留在“外觀復刻”層面,它們能展示設備的結構形態,卻無法響應外部數據指令,更難以模擬真實物理行為。而數字孿生的核心需求,恰恰是讓模型具備“數據驅動的動態交互能力”——這正是圖觀模型編輯器的突破點。
作為專為數字孿生設計的三維模型增強工具,圖觀模型編輯器通過標準化的 .tgm 格式,將靜態模型升級為集成“外觀渲染、數據驅動、跨平台渲染”於一體的“數字孿生體”。
它解決了三大核心痛點:
1.動態交互難題:通過“關節編輯”功能,讓模型部件可被數據實時控制;
2.視覺真實度瓶頸:藉助 PBR 材質系統與環境反應特性,還原設備物理質感;
3.跨平台兼容性:支持端渲染(WebGL本地運行)與流渲染(雲端實時推流)無縫切換,適配不同硬件環境。
以下,我們以“挖掘機數字孿生模型”的全流程製作為例,拆解 圖觀模型編輯器 如何將一台靜態挖掘機模型,變成可交互、可仿真、可數據聯動的“數字工程設備”。
二、案例實戰:製作“可數據驅動的挖掘機孿生體”
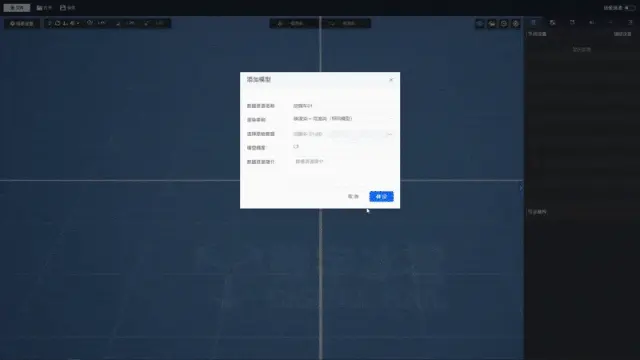
(一)模型導入:零門檻複用現有資源,保留完整結構信息
製作數字孿生模型的第一步,是“讓模型‘進得來’”。圖觀模型編輯器 支持FBX、GLB、OBJ等主流格式導入,且完整保留原模型的節點層級、材質紋理和網格信息——這意味着開發者無需從零建模,可直接複用設計院或工程團隊已有的挖掘機三維模型資源。
以本次案例為例,我們導入了一台包含“剷鬥、動臂、鬥杆、駕駛室、履帶、底盤”等部件的 FBX 格式挖掘機模型。導入後,編輯器自動解析出模型的層級結構:駕駛室為獨立節點,動臂與鬥杆通過關節點連接,履帶分為左右兩側獨立部件。這為後續的“關節綁定”和“動態控制”奠定了基礎。
(二)核心材質參數調節:從“塑料感”到“工業質感”
“好看”是數字孿生模型的基礎要求,而“真實”則是提升可信度的關鍵。圖觀模型編輯器的 PBR 材質系統,讓挖掘機的“金屬外殼、玻璃駕駛室、橡膠履帶”等部件呈現出符合物理規律的視覺效果。
金屬度與粗糙度:為挖掘機的“動臂液壓缸”“剷鬥邊緣”等金屬部件設置高金屬度和低粗糙度,模擬鋼材質的反光特性;而履帶板的“防滑紋路”區域則降低粗糙度,保留輕微磨砂質感,避免過度光滑導致的“塑料感”。

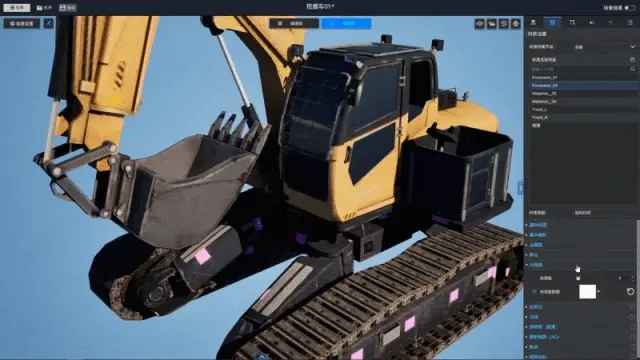
玻璃與塗層特效:駕駛室的擋風玻璃啓用“半透明”與“環境反射”屬性,調整折射率和反射強度,模擬真實玻璃的通透感與反光效果;車身表面添加“塗層特性”;剷鬥邊緣設置“材質繪製深度變換”,通過灰度貼圖模擬長期使用後的磨損痕跡,增強真實感。模擬工程設備常用的“防鏽漆”圖層,在強光下呈現細微的橘皮紋理。

(三)關節編輯:賦予模型“可數據驅動的運動能力”
如果説材質編輯解決了“還原度”的問題,那麼關節編輯則決定了模型“能不能動”——這是數字孿生區別於靜態模型的核心功能。圖觀模型編輯器的“關節系統”支持為模型定義“數值型、布爾型、枚舉型”三種關節類型,通過“關節綁定”讓模型部件與數據參數聯動。
在挖掘機模型中,我們重點配置了以下關鍵關節,實現對設備作業動作的精準控制:
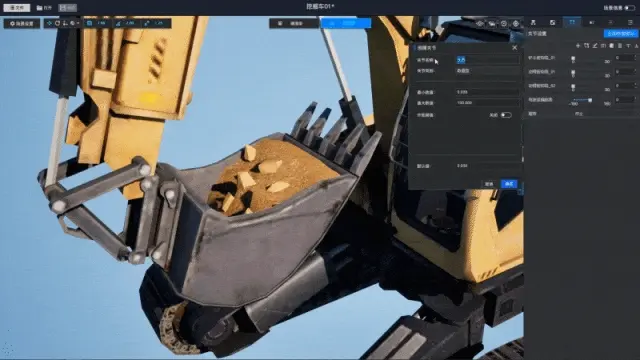
1. 數值型關節:精細化控制部件姿態
以“剷鬥俯仰角”為例:
挖掘機的“剷鬥”需要根據作業需求調整傾斜角度(如挖土時前傾、轉運時保持水平、傾倒時後仰)。通過圖觀模型編輯器的關節編輯,我們為剷鬥綁定了定義了數值型模型關節,可定義的數字範圍對應剷鬥從“最大後傾”到“最大前傾”狀態)。
類似地,我們為動臂綁定了“動臂俯仰角”控制動臂升降,為駕駛室綁定了“偏航角”(控制駕駛室左右旋轉以觀察視野,為鬥杆綁定了“鬥杆伸縮角”,控制鬥杆與動臂的夾角。
每個關節均在編輯器中生成獨立的“參數滑塊”,可實時拖動滑塊預覽效果。


2. 枚舉型關節:模擬設備狀態切換
以“履帶運動狀態”為例:
履帶作為挖掘機的行走部件,需要根據工況切換“停止、前進、後退”三種狀態。圖觀模型編輯器的“枚舉型關節”可完美實現這一需求。

3. 布爾型關節:開關控制輔助功能
以“土方開關”為例
為模擬“剷鬥挖土”的狀態,我們添加了“土方開關”布爾型關節,可動態控制剷鬥內“土方顆粒模型”的顯隱藏。
通過以上關節配置,挖掘機模型已具備“數據驅動的動態控制能力”——外部系統只需傳入簡單的數值、枚舉或布爾參數,即可讓模型完成“動作執行-狀態切換-效果展示”的全流程響應。
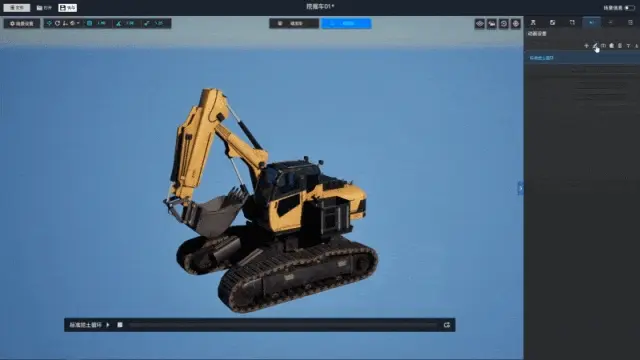
(四)動畫編輯:製作“挖土-存土-倒土”完整作業流程
單個關節的控制可實現簡單動作,而動畫編輯功能則能將多個關節的動作組合成“連貫作業流程”。圖觀模型編輯器支持通過“時間線腳本”定義各關節的數值變化序列,直觀配置每個關節的“起始值、目標值、持續時間”,生成複雜動畫。這一切均通過關節數值的時間序列實現,無需傳統關鍵幀動畫的複雜製作流程。你可以隨時調整動作幅度、時序甚至循環邏輯,
在挖掘機案例中,我們製作了“標準挖土循環”動畫,完整模擬工程作業中的“挖掘-轉運-傾倒”流程。通過動畫編輯,挖掘機模型不再是孤立的部件組合,而是能模擬真實作業邏輯的“數字設備”,可直接用於工程培訓、作業流程仿真等場景。

(五)一鍵導出,跨平台可用
在完成 挖掘機模型的構建和編輯後,圖觀模型編輯器支持將其導出為 .tgm 標準格式的圖觀模型文件。可以無縫導入圖觀各類開發工具,並且可以在場景構建、孿生體編輯、API開發等過程中靈活調用。
三、應用場景:從單一模型到完整數字孿生解決方案
通過以上步驟,我們得到的不再只是一個“看起來像”的挖掘機模型,而是一個:
1.可響應數據:可通過傳感器數據或控制指令實時驅動;
2.可交互操作:支持通過界面組件(如滑塊、下拉框)進行人為控制;
3.可組合動畫:能完成複雜作業流程的模擬;
4.可跨平台運行:依託 .tgm 格式的端/流雙渲染支持,在客户端用 WebGL,幀率優先;在展廳大屏走流渲染,效果優先;同一套數據接口,零改動遷移。

可廣泛應用於:
1.設備監控與運維:實時反映真實設備狀態
2.操作培訓模擬:提供安全的虛擬操作環境
3.施工方案預演:在虛擬環境中測試不同作業方案
4.遠程控制界面:作為可視化控制終端的一部分

立即體驗:獲取圖觀模型編輯器,開啓數字孿生創作之旅
如果您也想將靜態模型升級為“可數據驅動的數字孿生體”,不妨從圖觀模型編輯器開始——無論是工業設備、智慧城市設施,還是複雜機械系統,它都能幫您快速構建具備“動態交互、真實質感、跨平台兼容”的數字孿生模型。
