
前言:全面解析了智能機器人乘梯解決方案。首先從需求溯源出發,在智慧物流與工業4.0背景下,AGV與AMR需要突破樓層限制,實現自主乘梯。這依賴於機器人與電梯間的狀態同步、指令交互和多重安全防護。其次,系統架構方面,電梯狀態感知系統通過兩種方案採集電梯狀態數據,多奧硬件採集方案具有全品牌適配、物理絕緣和即插即用的優勢。人機對話中樞由多奧梯控系統擔任“翻譯官”,實現機器人對電梯的召喚和控制,並通過多種工業協議進行通信。安全生態構建包括三種運行模式和無源幹接點技術保障。最後,該方案適用於智能工廠、醫療物流、酒店服務等場景,具有降低成本、兼容性強、安全性高的價值。
一,機器人(AGV/AMR)自動乘梯、開門、過閘方案的技術實現原理與系統集成方案。核心原理是通過繼電器串聯控制電磁鎖供電迴路,實現機器人的解耦控制,具體包括電磁鎖控制邏輯、硬件接線示例等。系統集成方面,採用了多協議通信與模式切換機制,確保機器人與門禁系統的無縫對接。安全機制上,設計了防夾傷與障礙物檢測、通信冗餘與故障處理等功能。
二,機器人(AGV/AMR)自動乘梯系統的實現,重點介紹了多奧純硬件方案(DAIC-DT-ZT)的技術原理與行業實踐。文章從技術實現、交互邏輯、模式兼容性三個維度展開討論。在技術實現方面,多奧方案採用U型光電感應與抗干擾設計,實現了全品牌兼容性和高精度的轎廂平層位置檢測,並通過無線中繼增強方案解決了高層建築中的信號衰減問題。交互邏輯部分,多奧梯控支持RS-485與TCP/IP雙協議棧,確保AGV與電梯之間的雙向通信順暢,並設計了硬件級的安全控制機制,如開門保持和防夾功能聯動。模式兼容性方面,多奧採用無源幹接點技術,實現了與電梯的物理隔離和多模式動態切換,包括人機混用、梯控專用和電梯開放模式。
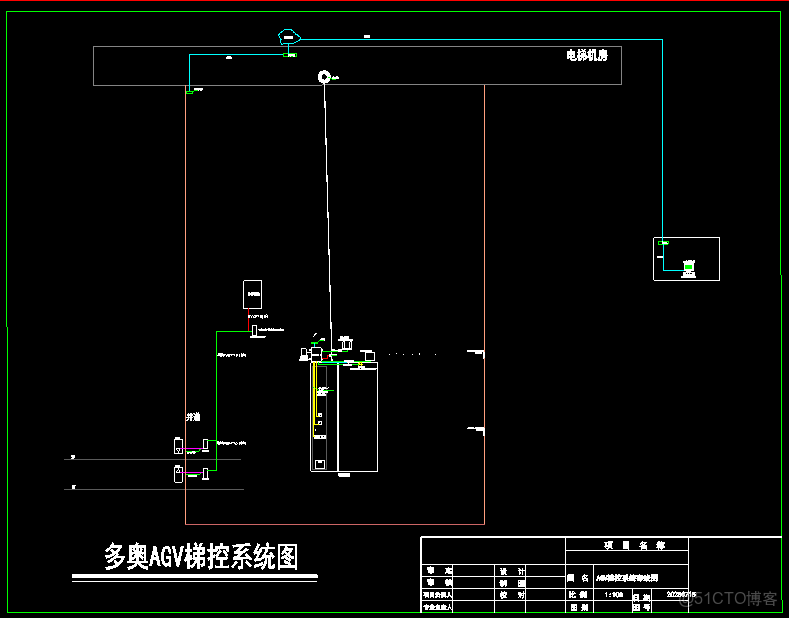
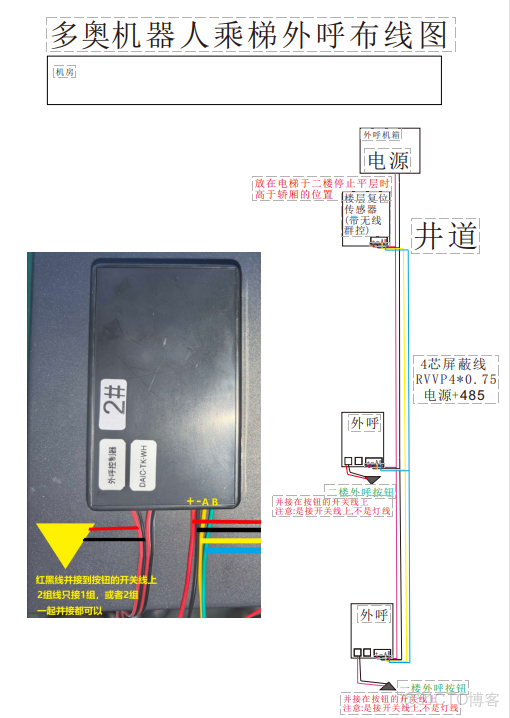
三,機器人(AGV/AMR)自動乘梯技術的關鍵要素。首先,要實現自動乘梯,機器人需精準獲取電梯轎廂的運行狀態,包括樓層位置、運行方向和門的開關狀態。數據獲取方式有兩種:電梯PLC協議採集和多奧純硬件方式(DAIC-DT-ZT),後者具有通用性和穩定性,能適配所有電梯品牌。其次,高效的信息交互是通過AGV/AMR與梯控(DAIC-DT-TK)之間的雙向通信實現的,確保機器人可以準確發送和接收電梯狀態信息,完成乘梯任務。最後,為了適應不同使用場景,該技術採用了純硬件無源幹接點方案進行安全改造,確保電梯原有邏輯優先級不變,保障了電梯的安全運行。
四,AGV(自動導引車)與AMR(自主移動機器人)實現自動開門的方案,主要圍繞環境感知、通信控制、安全機制三大核心展開,衍生出五種技術路徑。第一種是傳感器融合檢測與指令發送方案,通過多種傳感器檢測門的狀態併發送指令,適用於物流倉庫、無塵車間等場景;第二種是通信協議對接與權限驗證方案,通過無線通信與門禁系統建立連接,適用於智能工廠、智慧酒店等場景;第三種是繼電器控制與硬件改造方案,通過硬件改造實現對門電機的直接控制,適用於酒店客房、寫字樓訪客通道等場景;第四種是多模態感知與協同控制方案,集成多種技術實現全流程自動化,適用於醫院、智能製造等場景;第五種是雲端調度與協議適配方案,通過雲端平台兼容多種協議,適用於智慧農業、高端市場國產替代等場景。最後根據不同場景的需求,提出了方案選型建議。

五,在智能工廠中,AGV和AMR機器人能夠通過技術手段實現任何種類門的自動開門,解決了機器人因門禁系統而停滯的問題。傳統手動改造門禁系統存在風險,而多奧黑科技提供了一種無需對現有門禁系統進行改動的解決方案。該方案通過AGV給多奧門禁控制器發送開門信號,控制器輸出繼電器信號驅動開門設備並智能釋放電磁鎖,整個過程無縫銜接,既提高了工廠運轉效率又保障了原有門禁系統的安全性。;
六,實現機器人(AGV/AMR)自動乘梯所需的三大核心技術——電梯狀態感知、指令交互及模式切換的具體方案。電梯狀態實時感知方面,採用純硬件方案,利用多奧DAIC-DT-ZT設備採集電梯狀態信號,傳感器部署包括平層檢測和門狀態監測,數據通過Modbus TCP/IP或HTTP協議傳輸。機器人與梯控交互流程涵蓋呼梯控制和轎廂內操作,通信機制確保指令實時性。人機混用與模式切換部分提出動態優先級策略,在專用模式下機器人指令優先,在混合模式下人工操作優先,並設有分時段隔離。此外,還強調了無干擾改造方案,包括外呼/內呼控制的物理隔離和電梯原有邏輯的最高優先級,以及衝突解決與安全保障措施。