
機器人(狗)AGV\AMR乘梯控制系統方案設計書
前言
智能機器人乘梯控制系統是助力機器人(包括機器狗、AGV、AMR等)在複雜建築環境中實現自主垂直通行的核心技術。其核心功能在於幫助機器人精準獲取電梯的實時樓層信息、轎廂門開關狀態,並能自主完成呼叫電梯、登記目的樓層等操作,從而實現機器人在不同樓層間的無縫轉運與作業。
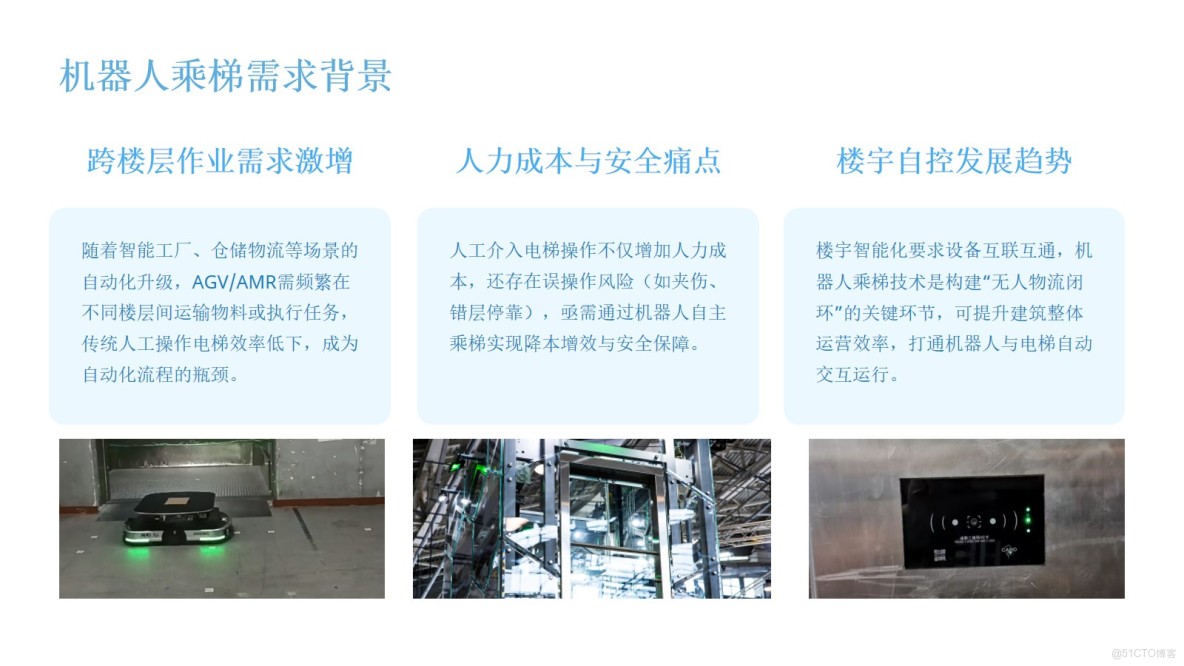
隨着人工智能與物聯網技術的飛速發展,機器人服務已逐漸成為現代生活與工作中不可或缺的重要組成部分。從智慧園區、智慧社區到智慧醫療、智能酒店及智能寫字樓,機器人在物流配送、巡檢安防、迎賓導覽、醫療輔助等領域發揮着日益重要的作用。因此,以前瞻性的眼光部署機器人應用,不僅是順應時代發展的必然選擇,更是搶佔智慧建築與智慧城市建設科技制高點、提升運營效率與服務品質的關鍵舉措。

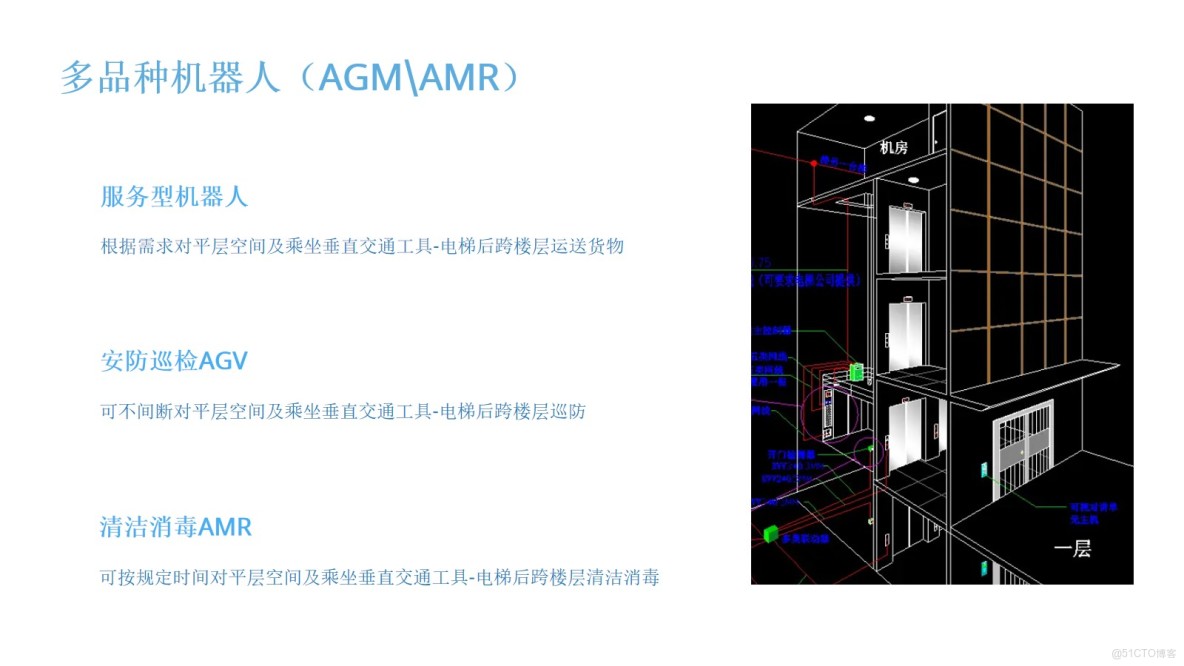
智能建築在規劃設計時,除了考慮傳統的人員與車輛通行出入口控制系統外,機器人(狗)AGV\AMR等智能移動設備的通行需求,包括門禁、閘機及乘坐垂直交通工具——電梯,已成為衡量建築智能化水平的重要指標。多奧機器人自主乘梯系統,憑藉其模塊化設計與開放的接口協議,能夠確保用户不斷享受到系統升級帶來的優越體驗,特別是針對特定項目的功能定製服務,以及持續適應物聯網技術發展的剛性需求。該系統通過與機器人進行靈活的協議對接(如MQTT、TCP、HTTP、RS-485、Modbus TCP或RTU等),實現機器人與電梯的無縫通信與協同工作,保障機器人自主、安全、高效地乘梯。根據實際項目的網絡環境與需求,機器人自主乘梯系統可提供局域網方案、4G\5G互聯網方案或LORA近場通訊等多種部署方式,確保系統的廣泛適用性與穩定性。
一、智能梯控系統功能及特點
硬件設備功能特點介紹
- 普適性與獨立性感知:系統配備純硬件獨立的感知傳感系統,無需依賴電梯本身的PLC或內部器件,即可精準獲取轎廂運行狀態信息(如當前樓層、門開關狀態等)。這一特性使其能夠廣泛適配各種品牌、各種型號的電梯,極大地降低了項目實施的侷限性。當然,若電梯公司能夠提供支持,多奧系統也支持通過協議與電梯直接對接,以滿足特定場景需求。
- 安全性與隔離性:梯控系統採用無源節點連接方式與電梯控制系統交互,與原電梯系統實現完全電氣隔離。這一設計確保了梯控系統的接入不會對電梯原有的安全性能、控制邏輯及運行參數產生任何負面影響,從根本上保障了電梯的安全運行。
- 便捷性與靈活性:在佈線方面,電梯門禁系統提供標準的網絡接口,客户可根據現場實際情況靈活選擇WIFI無線傳輸或4G/5G蜂窩網絡等聯網方式,極大地簡化了佈線工程,降低了施工難度,縮短了安裝週期,尤其適用於改造項目或對佈線有嚴格限制的場所。
- 穩定性與可靠性:多奧深耕梯控領域十餘年,專注於電梯控制系統的研發與優化,擁有在寫字樓、醫院、酒店等高流量、高負荷、高安全性要求的繁忙環境中長時間穩定運行的大量成功案例。系統經過市場的長期檢驗,具備極高的穩定性和可靠性,能夠確保機器人乘梯服務的連續與順暢。
- 開放性與支持性:為方便機器人(狗)AGV\AMR公司進行系統集成與對接,多奧提供詳盡、規範的協議資料文檔,並配套提供乘梯系統模擬DEMO程序及必要的技術支持服務。這有助於機器人廠商快速理解接口規範,加速開發進程,確保對接工作的順利高效完成。
電梯門禁系統設備及相關參數
|
設備模塊
|
技術參數
|
|
梯控主板
|
通信接口:RS485、TCP/IP、Modbus;控制方式:無源節點輸出;工作電壓:12V DC
|
|
樓層擴展板
|
單板控制 16 層,最大支持 4 塊擴展板(合計 64 層);接口:RS485 級聯
|
|
樓層傳感器
|
2 路光電信號感知;檢測精度:±1cm;響應時間:≤100ms
|
|
開關門傳感器
|
有源接近開關;檢測距離:5-10mm;輸出信號:NPN/PNP 可選
|
|
陀螺儀
|
量程:±180°/s;精度:±0.5°;用於檢測轎廂運行方向 / 姿態
|
|
激光測距模塊
|
測距範圍:0.1-10m;精度:±2mm;輔助樓層定位校準
|
|
貨物檢測傳感器
|
紅外對射;檢測範圍:0.5-5m;用於判斷轎廂內貨物是否到位
|
|
人體(活物)檢測
|
微波雷達 + 紅外感應;檢測範圍:0-3m;響應時間:≤200ms
|
|
U 感模塊
|
非接觸式感應;工作頻率:125KHz;用於轎廂內二次安全確認
|
|
RFID 樓層標籤
|
頻率:13.56MHz;存儲容量:≥1Kb;安裝於井道每層平層位置
|
|
RFID 讀卡器
|
讀取距離:2-5cm;接口:RS485;適配樓層標籤識別
|
|
整體運行參數
|
工作電流:正常 200mA,峯值 500mA;工作温度:-10~70℃;工作濕度:15~95%(無凝露)
|
二、電梯門禁系統設備及相關參數
|
設備/參數項
|
詳細説明
|
|
梯控主板通信接口 |
RS485, TCP/IP, Modbus (RTU/TCP),支持多種主流工業通信協議,確保與機器人及上位機的穩定通信。
|
|
控制樓層 |
標準配置通過樓層擴展板控制16層樓。最大可擴展驅動4個樓層擴展板,實現最高64層樓的控制。對於更高樓層需求,請諮詢多奧獲取定製化解決方案。
|
|
樓層傳感器 |
配備2路光電信號感知裝置,用於精確識別電梯轎廂當前所在樓層。
|
|
開關門傳感器 |
採用有源接近開關,用於實時、準確檢測電梯轎廂門的開啓與關閉狀態。
|
|
其他感知能力 |
系統可選配或集成陀螺儀(用於輔助判斷轎廂姿態或運動方向)、激光測距(用於特定距離檢測或定位)、貨物檢測傳感器(檢測轎廂內是否有貨物)、人體(活物)檢測傳感器(檢測轎廂內是否有人員或活物)、U感、RFID樓層標籤及RFID讀卡器等,以滿足不同場景下的特殊感知需求。
|
|
工作電壓 |
12V 直流電源供電。
|
|
工作電流 |
正常工作狀態下,工作電流約為200mA。
|
|
工作温度 |
適應環境温度範圍廣,為 -10℃ ~ 70℃,可應對大多數室內外電梯井道及轎廂環境。
|
|
工作濕度 |
適應環境濕度範圍為 15% ~ 95% (非凝結),具備良好的防潮性能。
|
三、梯控設備主要清單
系統核心設備及技術參數
|
設備類別 |
設備名稱 |
核心功能描述 |
關鍵參數/特性 |
|
控制中樞 |
智能梯控主板 |
系統大腦,負責協議通信、邏輯判斷、指令下發。 |
通信接口:RS-485, TCP/IP, Modbus; 工作電壓:DC12V; 工作温度:-10~70℃。 |
|
執行單元 |
樓層觸點擴展板 |
接收主板指令,通過無源幹觸點安全模擬按下目標樓層按鈕。 |
單板控制16層,可擴展至64層或更多。 |
|
狀態感知 |
樓層傳感器 |
精確檢測電梯實時所在樓層及平層狀態。 |
採用光電或磁感應原理,自動計算校準。 |
|
開關門檢測傳感器 |
實時監測電梯轎廂門的開、關及到位狀態。 |
有源接近開關或激光測距,狀態準確。 |
|
|
人體/貨物存在傳感器 |
探測轎廂內是否有人員或其他活體滯留,保障機器人專梯專用安全。 |
採用微波或紅外技術,實現活體檢測。 |
|
|
激光測距/陀螺儀 |
輔助檢測電梯運行姿態、平層精度,或檢測轎廂內貨物高度。 |
提升狀態感知的精準度。 |
|
|
交互與聯網 |
信號採集處理板 |
匯聚各類傳感器信號,進行初步處理,並通過標準協議與機器人通信。 |
負責與機器人進行實時數據交互。 |
|
聯網/協議轉換器 |
將系統接入局域網/互聯網,並實現不同通信協議間的轉換。 |
支持有線、Wi-Fi、4G/5G等聯網方式。 |
|
|
輔助定位 |
U型傳感器/RFID |
在井道內安裝定位標籤(RFID),轎頂安裝讀卡器,實現絕對樓層位置校準。 |
防止因傳感器累加誤差導致的樓層漂移。 |
智能機器人乘梯層控型電梯控制系統是一個集成化的解決方案,其主要組成設備清單解析如下:
- 智能電梯控制器(梯控主板):系統核心,負責接收機器人指令、解析樓層信號、控制電梯內外呼按鈕、樓層按鈕及開門按鈕的操作,協調各模塊工作。
- 樓層觸點擴展板:用於擴展樓層控制點數,配合梯控主板實現對多個樓層按鈕的控制。
- 貨物(人體/活物)傳感器:安裝於電梯轎廂內(如轎廂頂部或側壁),用於檢測轎廂內是否有貨物、人員或其他活物存在,為機器人乘梯安全策略提供依據(如防止夾人、優先保障人員通行等)。
- 開關門檢測器:通常為有源接近開關或光電傳感器,安裝於轎廂門或層門附近,用於精確檢測電梯轎廂門及層門的實時開關狀態。
- 樓層傳感器:安裝於電梯轎廂頂部或井道特定位置,通過光電、磁阻或RFID等方式,實時獲取並向控制器反饋電梯轎廂當前所處的精確樓層信息。
- 聯網器(協議轉換器/網關):實現梯控系統與外部網絡(局域網或廣域網)的連接,支持多種網絡協議轉換,是機器人與梯控系統進行數據交互的關鍵網絡設備。
- 信號採集器板/信號處理板:集中接入各類傳感器(如樓層傳感器、開關門傳感器、活物傳感器等),對原始傳感器信號進行濾波、放大、整形和初步處理,並將處理後的數據上傳給梯控主板或直接與機器人進行交互。
- RFID樓層標籤與RFID讀卡器:(如採用RFID方案)RFID樓層標籤安裝於各樓層井道或轎廂頂部,RFID讀卡器安裝於轎廂或機器人上,用於輔助樓層定位。
- U感/其他定位輔助設備:根據具體定位方案選配,用於提升樓層定位精度或實現特殊功能。
梯控設備主要清單
|
設備名稱
|
數量
|
核心作用
|
|
智能電梯控制器(主板)
|
1 套
|
核心控制單元,接收機器人指令,輸出電梯按鈕(樓層 / 開門 / 關門)控制信號
|
|
樓層觸點擴展板
|
按需
|
擴展樓層控制通道,適配不同樓層數樓宇
|
|
貨物(人體)傳感器
|
1-2 套
|
轎廂內安裝,檢測是否有人 / 貨物,防止機器人誤操作導致安全事故
|
|
開關門檢測器
|
2 套
|
轎廂門兩側安裝,實時檢測門的開啓 / 關閉 / 半開狀態,反饋給機器人
|
|
樓層傳感器
|
1 套
|
井道 / 轎廂安裝,精準識別轎廂當前樓層,輸出平層信號
|
|
聯網器(協議轉換器)
|
1 套
|
實現 RS485/Modbus 與 TCP/MQTT 協議轉換,支持 WIFI/4G / 有線聯網
|
|
信號採集處理板
|
1 套
|
接入所有傳感器信號,進行濾波、校準、邏輯判斷,輸出標準化狀態數據
|
|
安裝輔材(線材 / 支架)
|
1 套
|
含 RVV2×1.0 電源線、RVSP2×0.75 通信線、傳感器安裝支架、固定件等
|
四、電梯轎廂運行狀態監測與交互
為確保機器人能夠安全、高效地乘坐電梯,梯控系統需要精確監測電梯轎廂的各項運行狀態,並與機器人進行實時數據交互。
- 開關門狀態檢測:通過安裝在轎廂門或層門邊緣的開關門傳感器(如紅外對射傳感器、霍爾傳感器或機械行程開關),實時、準確地檢測電梯轎廂門和層門的開啓、關閉及處於中間狀態的信息。這些信息是機器人判斷是否可以進出轎廂、是否可以啓動呼梯等操作的重要依據。
- 樓層位置檢測:通過樓層傳感器(如光電傳感器配合井道內的隔光板、RFID讀卡器配合樓層標籤、或激光測距儀等)獲取電梯轎廂當前所在的精確樓層信息。這是機器人進行目的樓層登記、確認到達目標樓層的核心數據。
- 轎廂內環境檢測:通過安裝在轎廂內的活物傳感器(如紅外人體感應器、微波雷達傳感器)檢測轎廂內是否有人員或其他活物;通過貨物檢測傳感器(如超聲波傳感器、重量傳感器)檢測轎廂內是否有貨物。這些信息有助於機器人判斷是否適合進入轎廂,或在特定情況下(如轎廂內有人)採取避讓或等待策略。
- 信號採集與處理:信號採集處理板負責集中接入上述各類傳感器,對採集到的模擬量或數字量信號進行統一的濾波、邏輯判斷和數據轉換處理,確保信號的準確性和可靠性。處理後的轎廂狀態信息(樓層、門狀態、轎廂內有無人員/貨物等)將實時發送給梯控主板。
- 與機器人交互:梯控主板或信號採集處理板通過聯網器接入網絡,與機器人建立穩定的通信連接。機器人可以向梯控系統發送呼梯請求、目的樓層請求、開門請求等指令;梯控系統則向機器人反饋電梯當前位置、運行方向、門狀態、是否允許進入等狀態信息,形成一個閉環的交互過程。
- 聯網與協議轉換:聯網器(協議對接轉換) 是梯控系統接入網絡的關鍵設備,它可以方便地接入項目現場的路由器或交換機,為梯控設備提供穩定的網絡接入能力。其內部集成的協議轉換功能,能夠將梯控系統內部協議轉換為機器人所能識別的標準協議(如MQTT、TCP/IP等),反之亦然,從而實現兩者之間無障礙的數據通信。
電梯轎廂運行狀態檢測
4.1 檢測維度及原理
|
檢測維度
|
檢測設備
|
工作原理
|
|
轎廂樓層
|
樓層傳感器 + RFID
|
光電傳感器檢測平層信號,RFID 標籤精準定位樓層,雙重校驗確保樓層信息準確
|
|
轎廂門狀態
|
開關門傳感器
|
接近開關檢測門體位移,輸出 “開門到位 / 關門到位 / 門未關嚴” 三種狀態
|
|
轎廂運行方向
|
陀螺儀 + 樓層變化
|
陀螺儀檢測轎廂加速度方向,結合樓層數值變化,判斷 “上行 / 下行 / 靜止”
|
|
轎廂內活物 / 貨物
|
人體傳感器 + 貨物檢測
|
微波雷達檢測人體移動,紅外對射檢測貨物佔位,輸出 “有 / 無” 狀態
|
|
轎廂位置校準
|
激光測距
|
實時測距井道基準點,校準樓層傳感器誤差,適應電梯找平層偏差
|
4.2 數據輸出規則
所有檢測數據經信號採集處理板標準化後,以 “狀態碼 + 數值” 形式輸出,例如:
- 樓層狀態:
FL:25(表示轎廂在 25 層); - 門狀態:
DOOR:1(1 = 開門到位,0 = 關門到位,2 = 門未關嚴); - 運行方向:
DIR:UP(UP = 上行,DOWN = 下行,STOP = 靜止); - 活物檢測:
HUMAN:1(1 = 有活物,0 = 無活物)。
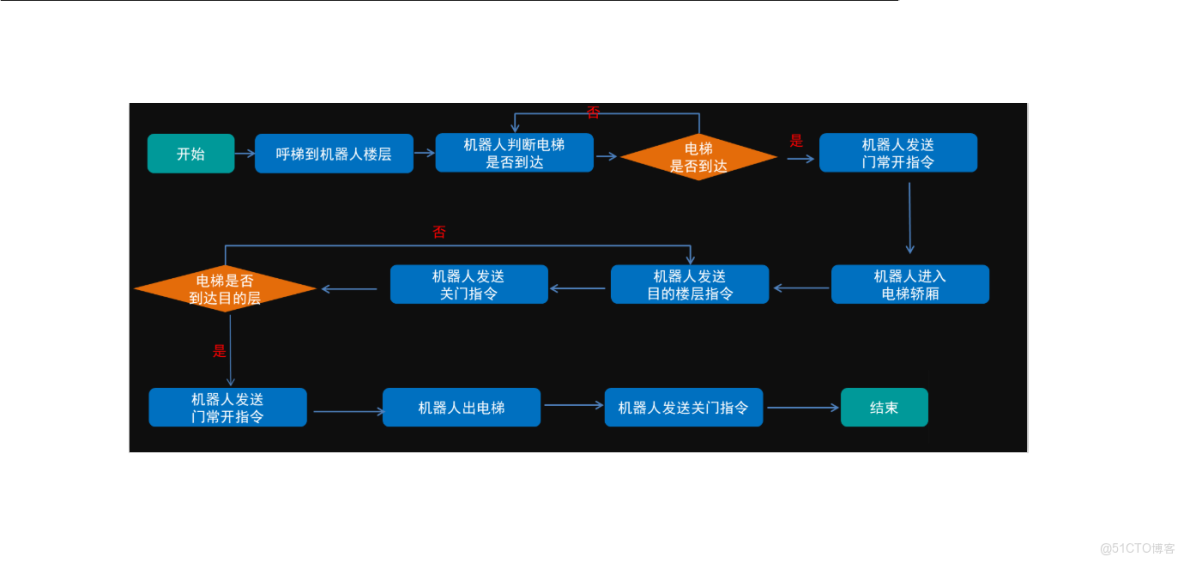
五、機器人自主乘梯通行流程圖
(以下為機器人自主乘梯的典型工作流程描述,實際流程可能根據具體項目需求和安全策略略有調整)

- 機器人任務規劃與乘梯需求產生:機器人根據自身任務規劃,當需要從當前樓層移動至目標樓層且無法通過樓梯等其他方式到達時,觸發乘梯需求。
- 機器人請求乘梯服務:機器人通過預設的通信協議(如MQTT/TCP)向梯控系統(或雲端調度系統,再由雲端轉發給梯控系統)發送乘梯請求。請求信息通常包含:當前所在樓層(出發樓層)、目標樓層、機器人ID等。
- 梯控系統接收與處理請求:梯控系統聯網器接收機器人乘梯請求,傳遞給梯控主板。主板驗證請求合法性後,根據電梯當前狀態(空閒、運行中、所在樓層、運行方向)決策是否響應請求。
- 梯控系統呼叫電梯至出發樓層:若電梯空閒且不在出發樓層,梯控主板通過控制出發樓層的外呼按鈕(上行或下行)呼叫電梯。
- 電梯響應呼叫併到達出發樓層:電梯控制系統響應外呼信號,驅動轎廂運行至機器人所在的出發樓層。
- 梯控系統通知機器人電梯到達:梯控系統通過樓層傳感器確認電梯轎廂已準確停靠在出發樓層,並通過開關門傳感器檢測到轎廂門/層門打開後,向機器人發送“電梯已到達,門已開,可以進梯”的指令。
- 機器人進入轎廂:機器人接收到進梯指令後,規劃路徑並移動進入電梯轎廂。部分系統可能通過貨物檢測傳感器或機器人自身傳感器確認機器人已完全進入轎廂。
- 機器人請求登記目的樓層:機器人進入轎廂後,通過與梯控系統交互(或梯控系統通過內部傳感器確認機器人已進入且門已關閉後),向梯控系統發送登記目的樓層的請求。
- 梯控系統登記目的樓層:梯控主板根據機器人的請求,通過控制轎廂內的樓層按鈕登記目標樓層。
- 電梯關門並向目的樓層運行:電梯控制系統接收到目的樓層指令後,確認轎廂門關閉(梯控系統通過開關門傳感器監測),驅動轎廂向目的樓層運行。
- 梯控系統監測電梯運行狀態:在電梯運行過程中,梯控系統持續通過樓層傳感器監測轎廂位置,通過陀螺儀(若配備)輔助判斷運行方向和狀態。
- 電梯到達目的樓層並開門:電梯轎廂到達目標樓層並準確停靠,電梯門自動打開。
- 梯控系統通知機器人到達目的樓層:梯控系統通過樓層傳感器確認電梯已到達目標樓層,並通過開關門傳感器檢測到門已打開後,向機器人發送“已到達目的樓層,門已開,可以出梯”的指令。
- 機器人離開轎廂:機器人接收到出梯指令後,規劃路徑並移動離開電梯轎廂。
- 梯控系統確認機器人離開:部分系統可能通過貨物檢測傳感器或機器人自身反饋確認機器人已完全離開轎廂。
- 電梯關門,乘梯流程結束:電梯門延時關閉,梯控系統本次服務結束,等待下一次乘梯請求。機器人則開始執行到達目的樓層後的任務。
關鍵安全校驗點:
- 在機器人進梯前,梯控系統可能通過活物傳感器檢測轎廂內是否有人員,若有人員,可能根據預設策略(如優先人員、提示機器人等待或與人員協同)處理。
- 機器人在進出梯過程中,梯控系統持續監測門狀態,若門意外關閉,可觸發開門指令。
- 若機器人在規定時間內未完成進梯或出梯動作,梯控系統可發出提醒或超時取消本次請求。
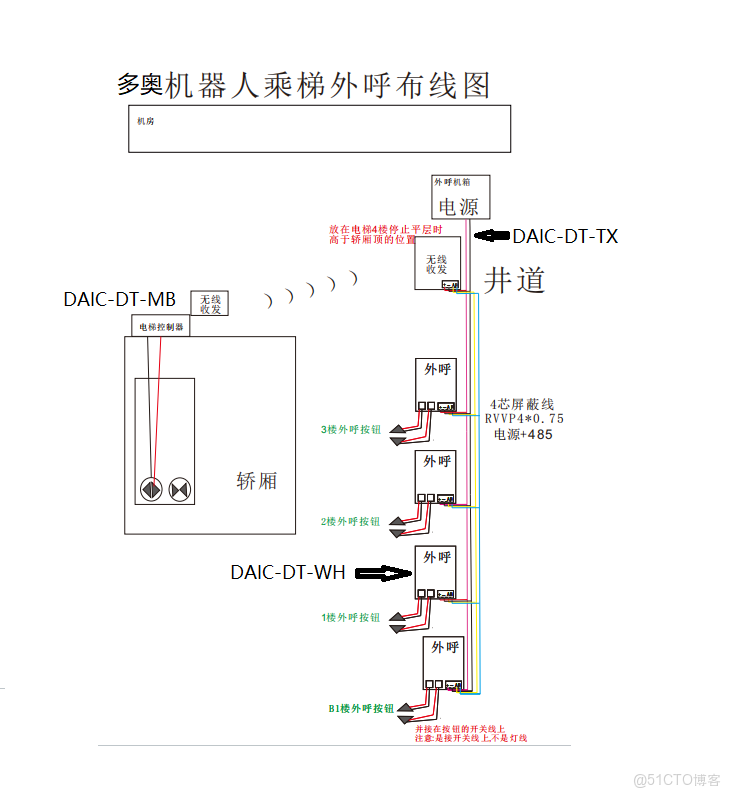
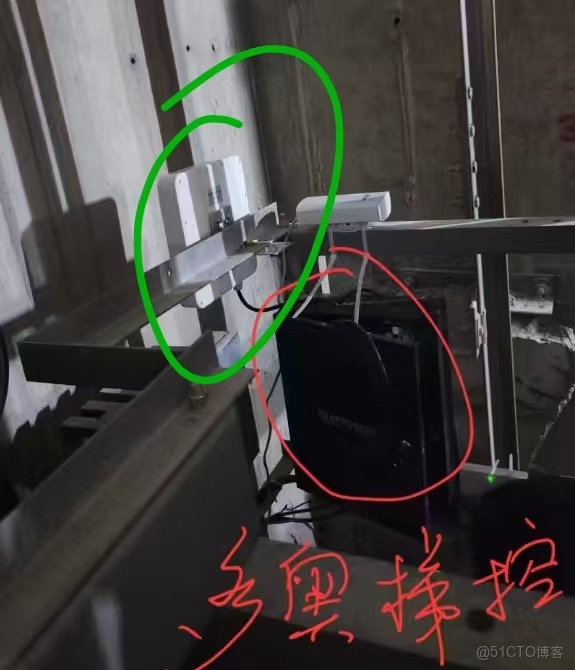
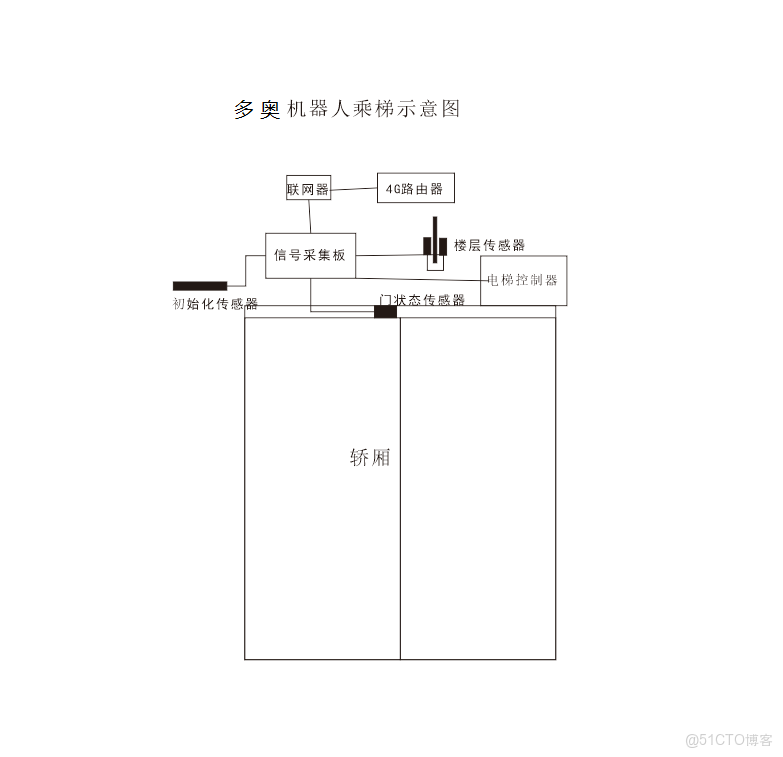
六、系統安裝佈線圖
(此部分為示意圖描述,實際安裝需根據電梯型號、現場環境及具體方案繪製詳細圖紙或找多奧)
系統安裝佈線圖及規範
6.1 安裝位置規劃
|
設備
|
安裝位置
|
安裝要求
|
|
梯控主板 / 信號採集板
|
電梯轎廂頂控制櫃內
|
固定在防潮支架上,遠離電梯變頻器(避免電磁干擾),預留≥10cm 散熱空間
|
|
樓層傳感器
|
轎廂頂部 / 井道每層平層處
|
對準井道平層標記,安裝高度距地面 / 轎廂地板 1.5m,確保無遮擋
|
|
開關門傳感器
|
轎廂門內側上沿
|
左右門各安裝 1 個,對準門體觸發片,檢測距離 5-8mm
|
|
人體 / 貨物傳感器
|
轎廂內部頂部居中位置
|
感應範圍覆蓋整個轎廂,避免盲區,與轎廂燈保持≥20cm 距離
|
|
RFID 標籤
|
井道每層平層導軌旁
|
與轎廂 RFID 讀卡器高度對齊,安裝牢固(防電梯運行震動脱落)
|
|
聯網器
|
轎廂頂 / 樓宇弱電井
|
若為 4G 版,需安裝在信號良好區域;若為 WIFI 版,需靠近電梯井道 WIFI 覆蓋點
|
6.2 佈線規範
- 線材選型:
- 電源線:RVV2×1.0mm²,額定電壓≥300V,耐温≥80℃;
- 通信線:RS485 用 RVSP2×0.75mm² 屏蔽線,TCP/IP 用超五類非屏蔽網線;
- 傳感器線:RVV3×0.5mm²(電源 + 信號),帶屏蔽層防干擾。
- 佈線要求:
- 所有線材沿電梯隨行電纜捆紮固定,避免彎折、拉扯;
- 屏蔽線單端接地(接地電阻≤4Ω),減少電磁干擾;
- 電源線與通信線分開佈線,間距≥10cm,避免串擾;
- 接線端子採用冷壓端子,做好編號標識,便於維護。
┌─────────────────┐ ┌─────────────────────────────┐ │ 機器人(AGV/AMR)│◄──TCP/IP/4G──►│ 聯網器(協議轉換器) │ └─────────────────┘ └───────────┬─────────────────┘ │ ▼ ┌─────────────────────────────────────────────────────┐ │ 電梯轎廂頂控制櫃 │ │ ┌─────────────┐ ┌─────────────┐ ┌──────────┐ │ │ │ 梯控主板 │◄──►│ 信號採集板 │◄──►│ 擴展板 │ │ │ └─────────────┘ └─────┬───────┘ └──────────┘ │ │ │ │ │ ┌──────────┐ ┌────────┴────────┐ ┌────────────┐ │ │ │樓層傳感器│ │開關門傳感器 │ │人體傳感器 │ │ │ └──────────┘ └─────────────────┘ └────────────┘ │ └─────────────────────────────────────────────────────┘ │ │ │ ▼ ▼ ▼ ┌─────────────┐ ┌─────────────┐ ┌─────────────────┐ │ 井道RFID標籤│ │ 轎廂門觸發片│ │ 轎廂內部感應區 │ └─────────────┘ └─────────────┘ └─────────────────┘
智能機器人乘梯控制系統的安裝佈線涉及電梯機房(若有)、井道、各樓層候梯廳以及電梯轎廂內部。
- 轎廂內設備安裝與佈線:
- 梯控主板:通常安裝於轎廂頂部的控制箱內或轎廂壁板內側合適位置,需固定牢固,避免震動影響。
- 信號採集器板:與梯控主板相鄰安裝,或集成在主板上,負責連接轎廂內的各類傳感器。
- 開關門傳感器:安裝於轎廂門楣或門邊緣,確保能準確檢測門的開、關狀態。佈線從傳感器沿轎廂壁或隨行電纜走至轎廂頂控制箱內的信號採集板。
- 活物傳感器/貨物檢測傳感器:活物傳感器(如紅外人體感應器)通常安裝於轎廂頂部中央或角落,朝向轎廂內部。貨物檢測傳感器根據類型可安裝於轎廂入口處或頂部。其信號線連接至信號採集板。
- 樓層傳感器(若安裝於轎廂):如採用光電傳感器配合井道隔光板方案,傳感器安裝於轎廂頂部靠近井道一側。若採用RFID讀卡器,則安裝於轎廂頂部或特定側面。信號線連接至信號採集板。
- 聯網器:若安裝於轎廂內,則需考慮網絡信號(Wi-Fi/4G天線)的佈置,確保信號良好。通常通過隨行電纜中的網線或無線方式與外部網絡連接。
- 井道內設備安裝與佈線:
- 樓層傳感器感應元件:如光電傳感器的隔光板、RFID的樓層標籤等,需按一定間隔和精確位置安裝在井道內壁對應各樓層平層區域。佈線相對簡單,主要是固定這些無源標籤或感應板。
- 隨行電纜:轎廂內設備的供電和信號線纜通常通過電梯原有的隨行電纜或新增的專用隨行電纜從轎廂頂部連接至井道外的控制櫃或樓層接線盒。
- 各樓層候梯廳設備安裝與佈線:
- 外呼按鈕控制模塊:梯控系統可能需要對原有外呼按鈕進行改造或並聯控制節點,以便梯控主板能夠控制外呼。此部分佈線需從候梯廳外呼面板引至樓層弱電井或就近的網絡接入點。
- 樓層聯網設備:若採用分層控制或需要在樓層設置信號中繼,相關的控制器或聯網設備安裝在樓層弱電間或豎井內,通過網線連接至建築局域網。
- 主控與網絡連接:
- 主控制器/集中管理設備:若系統採用集中控制方式,主控制器可安裝在監控中心或弱電間,通過網線與各電梯的聯網器通信。
- 電源供應:梯控系統各設備通常需要穩定的12V直流電源,可在轎廂頂控制箱內配置直流電源模塊,由電梯UPS或專用電源供電。樓層設備電源可就近取自樓層弱電電源。
- 佈線原則:
- 所有線纜應選用符合電梯行業標準的阻燃、耐彎曲、抗干擾線纜。
- 強電與弱電線路應分開佈線,避免干擾。
- 轎廂內佈線應隱蔽、牢固,避免影響轎廂美觀和正常運行。
- 井道內佈線應固定在專用線槽或線管內,避免被轎廂或對重撞擊。
- 網絡佈線應保證帶寬和穩定性,無線方案需進行信號覆蓋測試和優化。
編輯
七、開放協議規範
多奧梯控系統提供標準化協議接口,支持機器人廠商按需選擇對接方式,以下為核心協議示例:
7.1 Modbus RTU(RS485)協議
7.1.1 數據寄存器定義
|
寄存器地址
|
名稱
|
數據類型
|
取值範圍
|
説明
|
|
0x0000
|
當前樓層
|
16 位無符號
|
0-64
|
0 表示未檢測到樓層
|
|
0x0001
|
門狀態
|
16 位無符號
|
0 = 關門,1 = 開門,2 = 異常
|
|
|
0x0002
|
運行方向
|
16 位無符號
|
0 = 靜止,1 = 上行,2 = 下行
|
|
|
0x0003
|
活物檢測
|
16 位無符號
|
0 = 無,1 = 有
|
|
|
0x0004
|
外呼指令
|
16 位無符號
|
0 = 無,1 = 上行,2 = 下行
|
機器人寫入,觸發外呼
|
|
0x0005
|
樓層登記指令
|
16 位無符號
|
0-64
|
機器人寫入,登記目的樓層
|
7.1.2 指令示例(讀取當前樓層)
- 主機發送:
01 03 00 00 00 01 84 0A(地址 01,讀取寄存器 0x0000,長度 1); - 從機響應:
01 03 02 00 19 76 87(返回 25 層,0x0019=25)。
7.2 MQTT 協議(TCP/IP/4G)
7.2.1 主題定義
- 機器人發佈主題:
DOAO/LIFT/[電梯編號]/CMD(發送乘梯指令); - 梯控系統發佈主題:
DOAO/LIFT/[電梯編號]/STATUS(推送電梯狀態)。
7.2.2 指令格式(JSON)
- 機器人發送呼叫電梯指令:
json
{
"lift_id": "LIFT001",
"cmd_type": "CALL",
"direction": "UP",
"call_floor": 5,
"timestamp": 1758000000
}- 梯控系統推送狀態:
json
{
"lift_id": "LIFT001",
"current_floor": 5,
"door_status": "OPEN",
"direction": "STOP",
"human_detect": 0,
"cmd_result": "SUCCESS",
"timestamp": 1758000010
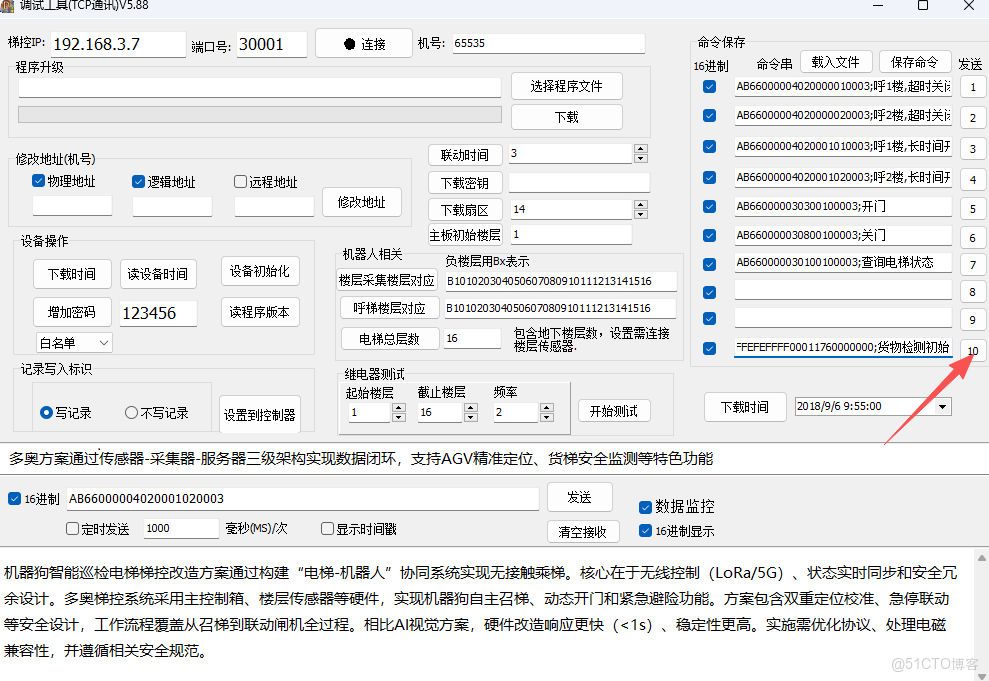
}7.3 協議對接支持
- 提供完整的協議文檔(含指令集、狀態碼、異常碼);
- 提供 Windows/Linux 版模擬 DEMO 程序,支持離線調試指令收發;
- 技術團隊全程配合對接調試,提供聯調指導。
多奧方案通過智能梯控系統與機器人之間的緊密協作,實現了機器人自主乘梯的智能化、高效化,為智慧建築的發展提供了有力支持。我們期待與各方合作伙伴攜手共進,共同推動智能機器人乘梯控制技術的創新與應用。