
目錄
一、內核數據結構:管道的“骨架”
二、管道通信:原理與實現
三、進程管理與信號:管道的“邊界控制”
1. 進程狀態與ps命令
2. 信號:管道的 “異常通知”
實戰:自定義SIGPIPE處理
四、管道的侷限性與優化方向
1. 匿名管道的核心侷限性
2. 優化與替代方案
(1)命名管道(FIFO):突破 “親緣關係” 限制
(2)更復雜的 IPC 機制:應對多樣化需求
五、拓展實戰:基於管道的進程池實現
1. 任務定義頭文件(Task.hpp)
2. 管道型進程池核心代碼
總結:管道是Linux IPC的“入門鑰匙”
在 Linux 系統編程中,進程間通信(IPC) 是實現多進程協作的關鍵,而管道(Pipe) 作為最基礎的 IPC 機制之一,背後藴含着內核數據結構、系統調用和進程管理的深層邏輯。本文將從數據結構、管道原理、進程管理、實戰應用四個維度解析管道通信,並拓展實現管道型進程池,展示管道在批量任務調度中的進階用法。
一、內核數據結構:管道的“骨架”
要理解管道,先得看清它依賴的核心數據結構——這些結構體是Linux內核管理“文件”和“進程”的基石。
1. struct file 與 struct file_operations
- struct file :描述**“打開的文件”**,包含文件狀態(如是否可讀寫)、文件偏移量、指向文件操作的指針等。管道本質上是一種“特殊文件”,因此也由 struct file 管理。
- struct file_operations :是一個函數指針集合,定義了對文件的所有操作(如 read 、 write 、 open 、 close 等)。管道的讀寫邏輯,就通過重載這些函數指針實現“字節流通信”。
2. task_struct :進程的“身份證”
task_struct 是Linux內核中描述進程的結構體,包含進程ID(PID)、進程狀態、文件描述符表、父子進程關係等關鍵信息。
- 每個進程都有一個 task_struct 實例,而文件描述符表是其中的核心組件——它記錄了進程打開的所有文件(包括管道),讓進程能通過“文件描述符”(如 pipefd[0] / pipefd[1] )操作管道。
3. 數據結構的關聯:進程與管道的“紐帶”
進程通過文件描述符表關聯到 struct file ,而 struct file 又通過 struct file_operations 定義管道的讀寫行為。這種關聯,讓“進程操作管道”的邏輯得以落地:
graph LR
A[進程 task_struct] --> B[文件描述符表];
B --> C[struct file(管道)];
C --> D[struct file_operations(管道讀寫邏輯)];二、管道通信:原理與實現
管道是“單向字節流”通信機制,分為匿名管道和命名管道(FIFO)。我們先聚焦“匿名管道”的原理與實現。
1. 接口定義: pipe() 系統調用
創建匿名管道的入口是 pipe() 系統調用,原型如下:
#include <unistd.h>
int pipe(int pipefd[2]);- pipefd[0] :讀端,用於從管道中讀取數據;
- pipefd[1] :寫端,用於向管道中寫入數據;
- 返回值:成功返回 0 ,失敗返回 -1 。
2. 內核實現細節
匿名管道的內核實現,藏着三個關鍵邏輯:
- 基於文件系統的“匿名性”:
匿名管道沒有文件名,僅在創建它的進程及其子進程中可見(通過 fork 繼承文件描述符)。內核通過“文件系統”機制管理管道的緩衝區,但不將其暴露到磁盤文件系統中。
- 容量限制: PIPE_BUF :
Linux中管道的默認緩衝區大小是 4096字節(PIPE_BUF) 。如果寫入數據超過 PIPE_BUF ,寫入操作可能不再“原子性”(多個寫操作的數據可能交織)。
- 通信流程:“寫→存→讀”:
寫進程向 pipefd[1] 寫入數據,內核將數據暫存到“管道緩衝區”;讀進程從 pipefd[0] 讀取數據,內核從緩衝區中消費數據——以此實現進程間的“字節流”通信。
3. 實戰示例:父子進程管道通信
下面是一個經典的“父進程寫、子進程讀”的管道通信示例:
一:
#include <stdio.h>
#include <unistd.h>
#include <string.h>
int main() {
int pipefd[2];
char buf[100];
// 1. 創建管道
if (pipe(pipefd) == -1) {
perror("pipe");
return 1;
}
// 2. fork創建子進程
pid_t pid = fork();
if (pid == -1) {
perror("fork");
return 1;
}
if (pid == 0) { // 子進程(讀端)
close(pipefd[1]); // 關閉寫端
int n = read(pipefd[0], buf, sizeof(buf));
printf("子進程讀取到:%.*s\n", n, buf);
close(pipefd[0]);
} else { // 父進程(寫端)
close(pipefd[0]); // 關閉讀端
const char* msg = "Hello, Pipe!";
write(pipefd[1], msg, strlen(msg));
close(pipefd[1]);
wait(NULL); // 等待子進程結束
}
return 0;
}運行結果會輸出: 子進程讀取到:Hello, Pipe! ,完美演示了管道的“父子通信”能力。
二:
#include <iostream>
#include <cstdio>
#include <string>
#include <cstring>
#include <cstdlib> //stdlib.h
#include <unistd.h>
#include <sys/types.h>
#include <sys/wait.h>
#define N 2
#define NUM 1024
using namespace std;
// child
void Writer(int wfd)
{
string s = "hello, I am child";
pid_t self = getpid();
int number = 0;
char buffer[NUM];
while (true)
{
sleep(1);
// 構建發送字符串
//buffer[0] = 0; // 字符串清空, 只是為了提醒閲讀代碼的人,我把這個數組當做字符串了
//snprintf(buffer, sizeof(buffer), "%s-%d-%d", s.c_str(), self, number++);
// cout << buffer << endl;
// 發送/寫入給父進程, system call
write(wfd, buffer, strlen(buffer)); // strlen(buffer) + 1???
//if(number >= 5) break;
}
}
// father
void Reader(int rfd)
{
char buffer[NUM];
while(true)
{
buffer[0] = 0;
// system call
ssize_t n = read(rfd, buffer, sizeof(buffer)); //sizeof != strlen
if(n > 0)
{
buffer[n] = 0; // 0 == '\0'
cout << "father get a message[" << getpid() << "]# " << buffer << endl;
}
else if(n == 0)
{
printf("father read file done!\n");
break;
}
else break;
// cout << "n: " << n << endl;
}
}
int main()
{
int pipefd[N] = {0};
int n = pipe(pipefd);
if (n < 0)
return 1;
// cout << "pipefd[0]: " << pipefd[0] << " , pipefd[1]: " << pipefd[1] << endl;
// child -> w, father->r
pid_t id = fork();
if (id < 0)
return 2;
if (id == 0)
{
// child
close(pipefd[0]);
// IPC code
Writer(pipefd[1]);
close(pipefd[1]);
exit(0);
}
// father
close(pipefd[1]);
// IPC code
Reader(pipefd[0]);
pid_t rid = waitpid(id, nullptr, 0);
if(rid < 0) return 3;
close(pipefd[0]);
sleep(5);
return 0;
}三、進程管理與信號:管道的“邊界控制”
管道通信並非孤立存在,它依賴進程生命週期管理和信號機制處理異常場景(如管道斷連、進程崩潰),確保通信穩定性。
1. 進程狀態與ps命令
通過ps命令可查看管道中進程的狀態,理解其阻塞 / 運行邏輯:
bash
ps -ef | grep 進程名 # 查看進程基本信息
ps -aux | grep 進程名 # 查看進程狀態(STAT列)- 狀態
S:可中斷睡眠,如讀進程等待管道數據時的狀態; - 狀態
Z:殭屍進程,若父進程未調用wait/waitpid回收子進程,會導致資源泄漏,管道通信中需特別注意。
2. 信號:管道的 “異常通知”
Linux 通過信號(Signal) 處理管道通信中的異常,常見關鍵信號如下:
|
信號
|
觸發場景
|
默認行為
|
|
|
按下 |
終止進程
|
|
|
管道讀端關閉後,寫端繼續寫入
|
終止進程
|
|
|
子進程退出,父進程未回收
|
忽略信號
|
實戰:自定義SIGPIPE處理
若子進程意外崩潰導致管道讀端關閉,父進程繼續寫管道會觸發SIGPIPE並終止。通過自定義信號處理函數,可避免父進程意外退出:
#include <signal.h>
#include <stdio.h>
void sigpipe_handler(int sig) {
printf("捕獲到SIGPIPE(信號%d):管道讀端已關閉,停止寫入!\n", sig);
}
int main() {
signal(SIGPIPE, sigpipe_handler); // 註冊信號處理函數
// 後續管道操作...
return 0;
}四、管道的侷限性與優化方向
匿名管道雖基礎,但存在明顯短板,需根據場景選擇優化方案:
1. 匿名管道的核心侷限性
- 通信範圍有限:僅支持有親緣關係的進程(父子、兄弟),無法實現無親緣關係進程(如兩個獨立的 Shell 進程)通信;
- 通信方向單一:僅支持 “單向通信”,若需雙向通信,需創建兩個管道(一個用於 A→B,一個用於 B→A);
- 無持久化:管道隨進程退出而銷燬,無法跨會話(如重啓進程後)保留通信狀態。
2. 優化與替代方案
(1)命名管道(FIFO):突破 “親緣關係” 限制
命名管道通過文件名在文件系統中創建實體(可見但不佔磁盤空間),支持無親緣關係進程通信,創建接口如下:
#include <sys/stat.h>
#include <sys/types.h>
// 1. 創建命名管道(類似創建文件)
int mkfifo(const char *pathname, mode_t mode);
// 2. 打開命名管道(類似打開文件)
int fd = open("myfifo", O_RDONLY); // 讀端打開
int fd = open("myfifo", O_WRONLY); // 寫端打開(2)更復雜的 IPC 機制:應對多樣化需求
若需更靈活的通信(如結構化數據、大內存傳輸),可選擇以下 IPC 機制:
|
IPC 機制
|
核心優勢
|
適用場景
|
|
消息隊列
|
支持結構化數據(消息類型 + 數據),非阻塞通信
|
多進程間按類型傳遞數據
|
|
共享內存
|
直接操作物理內存,速度比管道快 1 個數量級
|
大內存數據傳輸(如視頻流)
|
|
信號量
|
實現進程同步與互斥,避免數據競爭
|
多進程共享資源(如緩衝區)
|
五、拓展實戰:基於管道的進程池實現
管道的典型進階應用是管道型進程池—— 通過 “父進程管理管道寫端、子進程監聽管道讀端” 的模式,實現批量任務的分發與執行。以下是完整實現代碼與解析。
1. 任務定義頭文件(Task.hpp)
先定義進程池需執行的任務(如日誌刷新、野區更新等),通過函數指針統一任務類型:
#pragma once
#include <iostream>
#include <vector>
// 定義任務類型:無參數、無返回值的函數指針
typedef void (*task_t)();
// 任務1:刷新日誌
void task1() {
std::cout << "[任務1] 刷新日誌完成,當前時間:" << __TIME__ << std::endl;
}
// 任務2:刷新野區
void task2() {
std::cout << "[任務2] 野區刷新完成,生成3只小野怪" << std::endl;
}
// 任務3:檢測軟件更新
void task3() {
std::cout << "[任務3] 軟件版本檢測完成,當前為最新版v1.0.0" << std::endl;
}
// 任務4:更新血量和藍量
void task4() {
std::cout << "[任務4] 角色狀態更新完成,血量+100,藍量+50" << std::endl;
}
// 加載所有任務到任務列表
void LoadTask(std::vector<task_t> *tasks) {
tasks->push_back(task1);
tasks->push_back(task2);
tasks->push_back(task3);
tasks->push_back(task4);
}2. 管道型進程池核心代碼
通過管道實現 “父進程分發任務、子進程執行任務”,核心邏輯包括:進程池初始化、任務分發、資源回收。
管道資源的描述
#include "Task.hpp"
#include <string>
#include <vector>
#include <cstdlib>
#include <ctime>
#include <cassert>
#include <unistd.h>
#include <sys/stat.h>
#include <sys/wait.h>
const int processnum = 10;
std::vector<task_t> tasks;
// 先描述
class channel
{
public:
channel(int cmdfd, int slaverid, const std::string &processname)
:_cmdfd(cmdfd), _slaverid(slaverid), _processname(processname)
{}
public:
int _cmdfd; // 發送任務的文件描述符
pid_t _slaverid; // 子進程的PID
std::string _processname; // 子進程的名字 -- 方便我們打印日誌
// int _cmdcnt;
};
void Menu()
{
std::cout << "################################################" << std::endl;
std::cout << "# 1. 刷新日誌 2. 刷新出來野怪 #" << std::endl;
std::cout << "# 3. 檢測軟件是否更新 4. 更新用的血量和藍量 #" << std::endl;
std::cout << "# 0. 退出 #" << std::endl;
std::cout << "#################################################" << std::endl;
}
int main()
{
LoadTask(&tasks);
srand(time(nullptr)^getpid()^1023); // 種一個隨機數種子
// 在組織
std::vector<channel> channels;
// 1. 初始化 --- bug?? -- 找一下這個問題在哪裏?然後提出一些解決方案!
InitProcessPool(&channels);
// Debug(channels);
// 2. 開始控制子進程
ctrlSlaver(channels);
// 3. 清理收尾
QuitProcess(channels);
return 0;
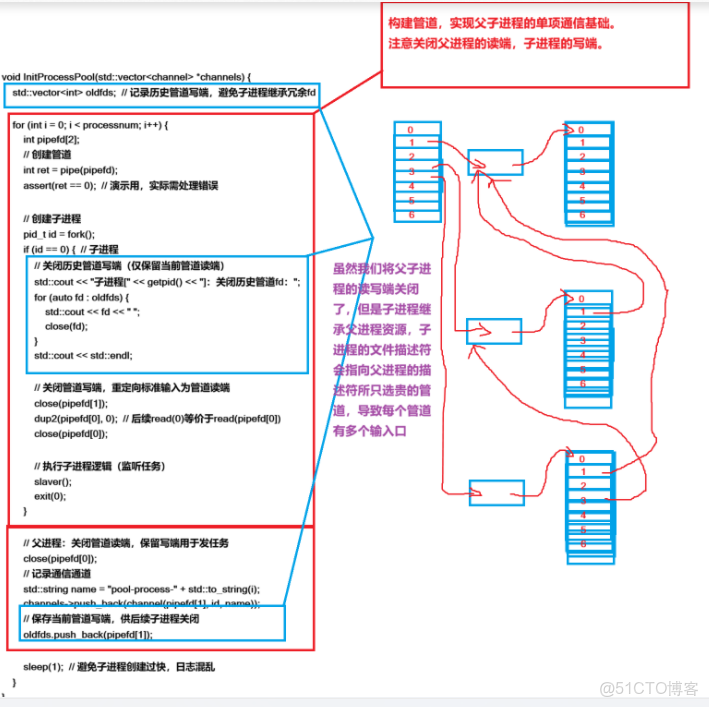
}初始化進程池:創建子進程+管道,建立通信通道
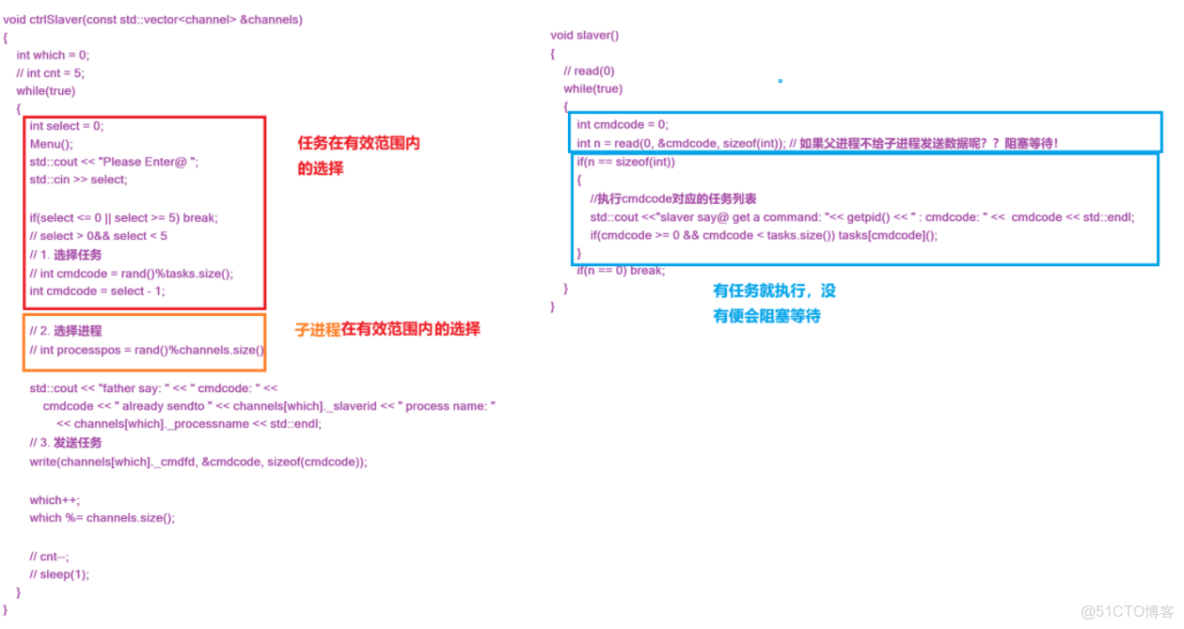
核心控制部分:父進程寫子進程讀
進程池資源釋放時依次遍歷關閉管道並等待子進程
void QuitProcess(const std::vector<channel> &channels)
{
for(const auto &c : channels){
close(c._cmdfd);
waitpid(c._slaverid, nullptr, 0);
}
}完整代碼
#include "Task.hpp"
#include <string>
#include <vector>
#include <cstdlib>
#include <ctime>
#include <cassert>
#include <unistd.h>
#include <sys/stat.h>
#include <sys/wait.h>
const int processnum = 10;
std::vector<task_t> tasks;
// 先描述
class channel
{
public:
channel(int cmdfd, int slaverid, const std::string &processname)
:_cmdfd(cmdfd), _slaverid(slaverid), _processname(processname)
{}
public:
int _cmdfd; // 發送任務的文件描述符
pid_t _slaverid; // 子進程的PID
std::string _processname; // 子進程的名字 -- 方便我們打印日誌
// int _cmdcnt;
};
void slaver()
{
// read(0)
while(true)
{
int cmdcode = 0;
int n = read(0, &cmdcode, sizeof(int)); // 如果父進程不給子進程發送數據呢??阻塞等待!
if(n == sizeof(int))
{
//執行cmdcode對應的任務列表
std::cout <<"slaver say@ get a command: "<< getpid() << " : cmdcode: " << cmdcode << std::endl;
if(cmdcode >= 0 && cmdcode < tasks.size()) tasks[cmdcode]();
}
if(n == 0) break;
}
}
// 輸入:const &
// 輸出:*
// 輸入輸出:&
void InitProcessPool(std::vector<channel> *channels)
{
// version 2: 確保每一個子進程都只有一個寫端
std::vector<int> oldfds;
for(int i = 0; i < processnum; i++)
{
int pipefd[2]; // 臨時空間
int n = pipe(pipefd);
assert(!n); // 演示就可以
(void)n;
pid_t id = fork();
if(id == 0) // child
{
std::cout << "child: " << getpid() << " close history fd: ";
for(auto fd : oldfds) {
std::cout << fd << " ";
close(fd);
}
std::cout << "\n";
close(pipefd[1]);
dup2(pipefd[0], 0);
close(pipefd[0]);
slaver();
std::cout << "process : " << getpid() << " quit" << std::endl;
// slaver(pipefd[0]);
exit(0);
}
// father
close(pipefd[0]);
// 添加channel字段了
std::string name = "process-" + std::to_string(i);
channels->push_back(channel(pipefd[1], id, name));
oldfds.push_back(pipefd[1]);
sleep(1);
}
}
void Debug(const std::vector<channel> &channels)
{
// test
for(const auto &c :channels)
{
std::cout << c._cmdfd << " " << c._slaverid << " " << c._processname << std::endl;
}
}
void Menu()
{
std::cout << "################################################" << std::endl;
std::cout << "# 1. 刷新日誌 2. 刷新出來野怪 #" << std::endl;
std::cout << "# 3. 檢測軟件是否更新 4. 更新用的血量和藍量 #" << std::endl;
std::cout << "# 0. 退出 #" << std::endl;
std::cout << "#################################################" << std::endl;
}
void ctrlSlaver(const std::vector<channel> &channels)
{
int which = 0;
// int cnt = 5;
while(true)
{
int select = 0;
Menu();
std::cout << "Please Enter@ ";
std::cin >> select;
if(select <= 0 || select >= 5) break;
// select > 0&& select < 5
// 1. 選擇任務
// int cmdcode = rand()%tasks.size();
int cmdcode = select - 1;
// 2. 選擇進程
// int processpos = rand()%channels.size();
std::cout << "father say: " << " cmdcode: " <<
cmdcode << " already sendto " << channels[which]._slaverid << " process name: "
<< channels[which]._processname << std::endl;
// 3. 發送任務
write(channels[which]._cmdfd, &cmdcode, sizeof(cmdcode));
which++;
which %= channels.size();
// cnt--;
// sleep(1);
}
}
void QuitProcess(const std::vector<channel> &channels)
{
for(const auto &c : channels){
close(c._cmdfd);
waitpid(c._slaverid, nullptr, 0);
}
}
int main()
{
LoadTask(&tasks);
srand(time(nullptr)^getpid()^1023); // 種一個隨機數種子
// 在組織
std::vector<channel> channels;
// 1. 初始化 --- bug?? -- 找一下這個問題在哪裏?然後提出一些解決方案!
InitProcessPool(&channels);
// Debug(channels);
// 2. 開始控制子進程
ctrlSlaver(channels);
// 3. 清理收尾
QuitProcess(channels);
return 0;
}總結:管道是Linux IPC的“入門鑰匙”
從 struct file 到 task_struct 的底層關聯,到 pipe() 系統調用的上層接口,再到進程管理和信號的邊界控制——管道通信串聯起了Linux內核數據結構、系統調用和進程協作的核心邏輯。
它或許不是最強大的IPC機制,但絕對是理解“Linux進程間如何協作”的最佳入門工具。掌握了管道,再去學習命名管道、消息隊列、共享內存等IPC機制,會更加水到渠成。
希望本文能幫大家徹底吃透Linux管道通信,下次面對多進程協作場景時,能精準選擇最適合的方案!