
停車場空車位檢測數據集(3000張圖片已劃分)[目標檢測]
在城市交通管理與智慧停車建設快速發展的當下,如何高效、精準地識別停車場空車位已成為智慧城市重要課題。為了支持研究者和工程團隊訓練高性能停車檢測模型,我們構建了停車場空車位檢測數據集,專為目標檢測任務優化設計。
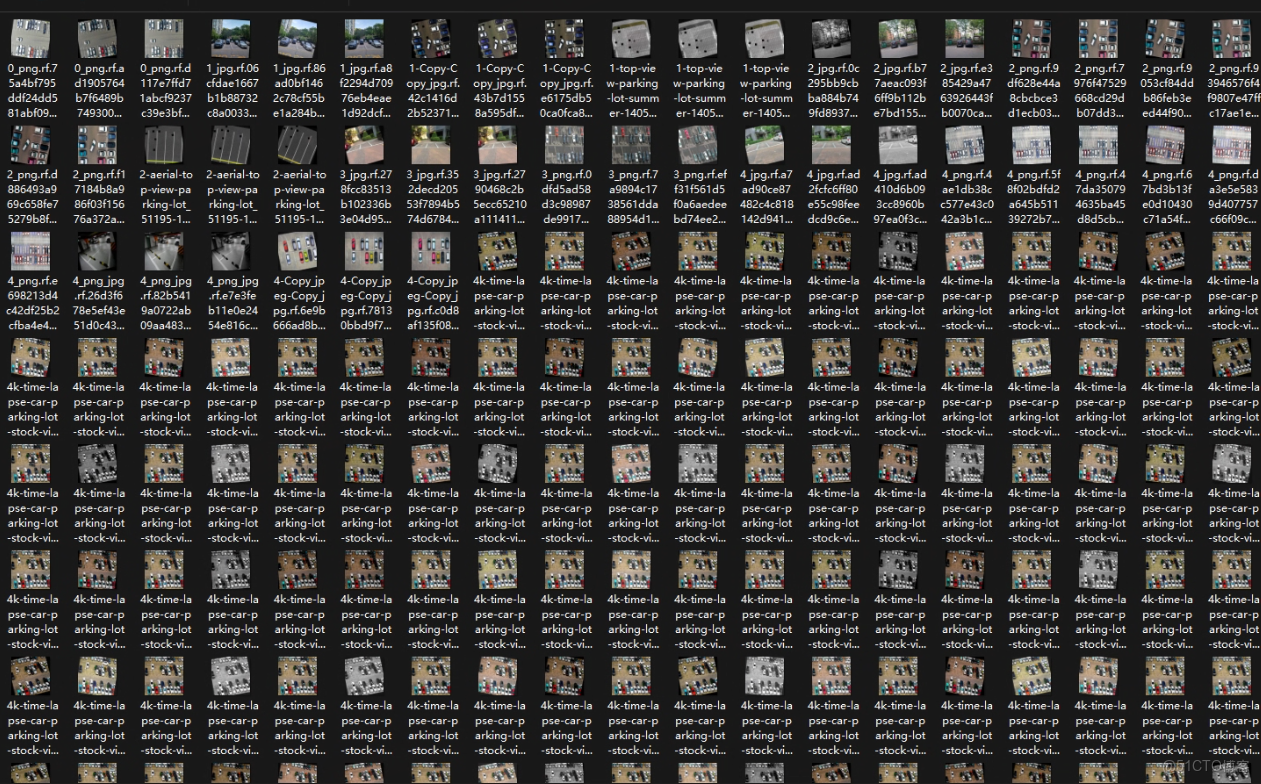
本數據集共包含 3000 張圖像,覆蓋多場景、多角度、多時間段真實停車場情況,為 AI 模型提供充分的學習樣本。

數據集下載
鏈接:https://pan.baidu.com/s/1pXDsQypPP3-skV-bRjtaKQ?pwd=qrhm 提取碼:qrhm 複製這段內容後打開百度網盤手機App,操作更方便哦
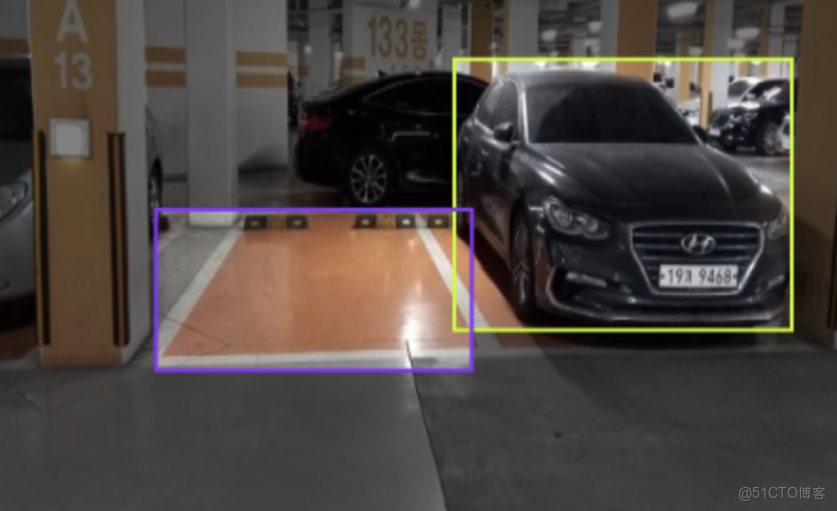
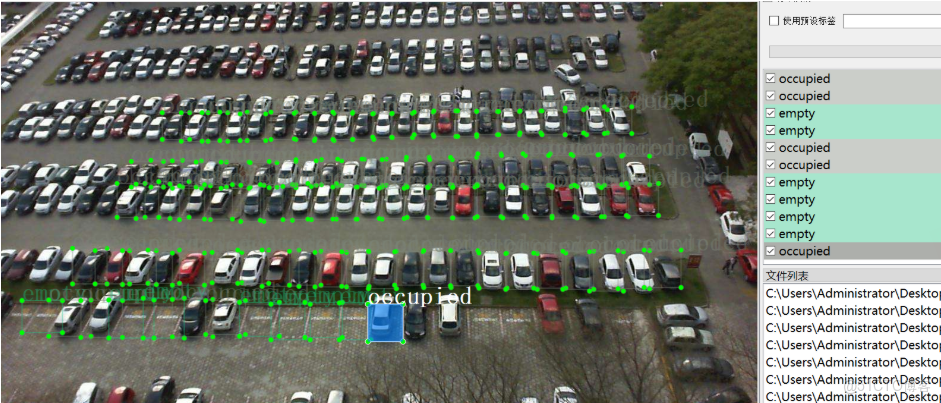
停車場空車位檢測數據集 本數據集用於訓練和驗證停車場空車位檢測模型,共包含 3000 張圖像,覆蓋多種光照、天氣和視角場景。 任務目標:識別停車場中的已停車輛與空車位 類別數量(nc):2 0: 已停車輛 1: 空車位
背景
隨着機動車數量持續上漲,停車難已成為城市治理中的突出矛盾。典型痛點包括:
- 🚗 車位資源不透明:駕駛員無法快速判斷目的地是否有空位
- 🕒 尋找車位耗時長:造成道路擁堵、油耗浪費和時間成本增加
- 🎯 停車場管理效率低:傳統人工巡查或地磁感應方式成本高、易失效
- 📉 數據缺失:缺乏對空車位數量和利用率的實時統計能力
為解決這些挑戰,智慧停車系統逐漸引入 AI 視覺技術,通過攝像頭實時識別停車位狀態,從而實現:
- 車流引導
- 空車位導航
- 資源最大化利用
- 自動化計費與監控
📌 在系統構建中,空車位識別準確性是核心能力,但訓練一個效果可靠的模型需要大量高質量的數據。尤其是:
- 夜間光照差
- 陰影、雨天、地面反光導致誤判
- 車輛形態多樣、大小差異明顯
- 停車線模糊、遮擋、傾斜視角等困難場景
因此,本數據集旨在提供真實環境採集樣本,提升模型對複雜場景的適應能力,助力 AI 停車檢測系統落地應用。

數據集概述
| 屬性 | 內容 |
|---|---|
| 圖像總數 | 3000 張 |
| 任務類型 | 目標檢測(Object Detection) |
| 標註格式 | YOLO 標註格式 |
| 類別數量 | 2 |
| 數據劃分 | Train / Valid / Test |
類別定義:
| 類別 ID | 類別名稱 | 説明 |
|---|---|---|
| 已停車輛 | 停在車位內或佔用停車區域的車輛 | |
| 1 | 空車位 | 可停放車輛的位置 |
路徑結構如下:
main/datasets
├── train/images
├── train/labels
├── valid/images
├── valid/labels
├── test/images
└── test/labels
數據劃分遵循機器視覺訓練標準:
- 訓練集 Train:約 70%
- 驗證集 Valid:約 20%
- 測試集 Test:約 10%
確保模型訓練與泛化性能穩定可靠。
數據集詳情
為了提升模型適應性,圖像採集覆蓋多種實際環境因素:
📍 場景多樣性
- 地上停車場 / 地下車庫
- 商場、寫字樓、醫院、小區等多業態場景
- 密集停車區、分散停車區、多層停車結構
📷 攝像機視角差異
- 俯視攝像頭
- 傾斜監控視角
- 遠距離與近距離拍攝覆蓋
🌗 光照與天氣影響
- 正午強光、陰影重疊
- 夜間低照度場景(含強光燈與噪點)
- 陰天、雨天路面反光干擾
🅿️ 停車位標識差異
- 白色、黃色、虛線、磨損線條
- 多車型尺寸兼容
- 包含殘障車位、電動樁車位
🎯 複雜遮擋場景納入標註:
- 植被遮擋、其他車輛部分覆蓋
- 行人經過場景
- 停車位部分擋住但仍判斷為可用
以上多維度採樣,確保模型能在真實部署中泛化良好。
適用場景
該數據集適用於多種 AI 應用方向:
| 場景 | 使用示例 |
|---|---|
| 智慧停車系統 | 實時車位識別與空位導航 |
| 智慧交通管理 | 統計停車資源數據,緩解擁堵 |
| 雲端停車分析平台 | 歷史車位佔用率分析與預測 |
| 智能車場設備 | 攝像頭+邊緣設備實時檢測 |
| 自動駕駛停車場景 | 自主泊車空位識別 |
此外,還可用於科研方向,例如:
- 小目標識別優化
- 遮擋場景重識別算法
- 多任務融合:車位分割 + 車位狀態分類
- 低照度視覺增強與魯棒性提升
目標檢測
本數據集默認支持 YOLOv5/YOLOv8 等目標檢測框架,可直接啓用訓練。
示例(YOLOv8):
yolo train model=yolov8s.pt data=main/datasets/data.yaml epochs=200 imgsz=640 batch=16
驗證 & 推理:
yolo val model=runs/train/exp/weights/best.pt data=main/datasets/data.yaml
yolo predict model=runs/train/exp/weights/best.pt source=parking.mp4
為實現生產部署,可進一步:
- 將模型量化與剪枝,以適配邊緣設備(如 NVIDIA Jetson / 海康攝像頭)
- 聯合車位線檢測進行幾何關係增強,降低誤識別
- 融合 Kalman Filter/SORT 進行車位狀態跟蹤
結語
停車場空車位檢測是智慧城市構建的重要一環。相比傳統傳感器方案,AI 視覺方案具有:
✔ 成本可控 ✔ 部署靈活 ✔ 信息豐富(提供車輛類型、佔位區域等更多數據) ✔ 可快速規模化升級
本數據集提供紮實的數據基礎,使研究者與企業可快速構建並優化停車檢測模型,助力:
- 提升停車效率
- 降低管理成本
- 減少道路擁堵
- 推動城市交通系統全鏈路智能化
未來我們將繼續:
- 擴張至 10,000+ 張圖像的數據規模
- 增加夜間監控、雨雪天氣等困難樣本
- 加入停車位語義分割、多模態標註等能力
如你有模型訓練支持、工程部署合作或數據補充需求,歡迎隨時交流,共同推動智慧停車技術落地,讓 AI 讓城市更通暢 🚀