
一、系統架構
1.1 整體流程
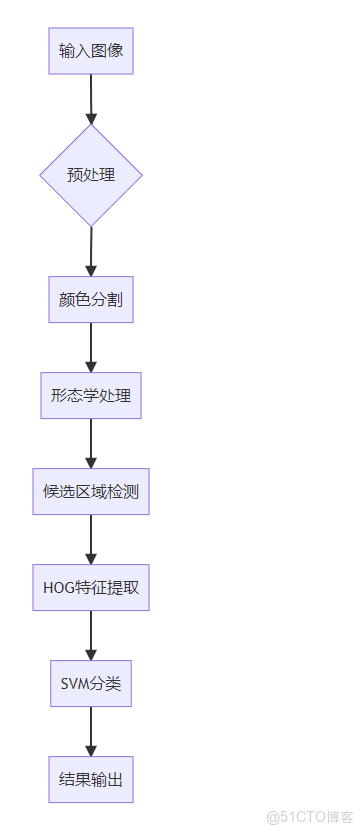
1.2 核心模塊説明
- 顏色分割:利用HSV空間抑制光照影響(H分量閾值範圍[30°,150°],S分量>0.4)
- 形態學處理:閉運算填充空洞,開運算去除噪聲(3×3結構元素)
- 候選區域檢測:MSER算法提取穩定區域,結合幾何約束(面積>500,寬高比0.8-2.0)
- HOG特徵提取:64×64窗口,9個方向bin,單元格大小8×8
- SVM分類器:RBF核函數,C=100,gamma=0.05(通過網格搜索優化)
二、關鍵算法實現
2.1 顏色分割模塊
function mask = hsv_segmentation(img)
hsv = rgb2hsv(img);
h = hsv(:,:,1)*180; % 轉換為0-180度
s = hsv(:,:,2);
v = hsv(:,:,3);
% 顏色閾值(適應中國交通標誌主色)
red_mask = (h > 0 & h < 20) | (h > 160 & h < 180);
blue_mask = (h > 100 & h < 140);
yellow_mask = (h > 20 & h < 40);
combined_mask = red_mask | blue_mask | yellow_mask;
mask = combined_mask & (s > 0.4) & (v > 0.3);
% 形態學處理
se = strel('disk',1);
mask = imclose(mask,se);
mask = imopen(mask,se);
end2.2 HOG特徵提取
function features = extract_hog(img)
% 圖像預處理
img_gray = rgb2gray(img);
img_resized = imresize(img_gray, [64 64]);
% HOG參數設置
cell_size = 8;
block_size = 2;
num_bins = 9;
% 提取HOG特徵
hog_feat = extractHOGFeatures(img_resized, 'CellSize', [cell_size cell_size], ...
'BlockSize', [block_size block_size], 'NumBins', num_bins);
% 特徵歸一化
features = hog_feat / norm(hog_feat);
end2.3 SVM分類器訓練
% 加載數據集(示例使用GTSRB子集)
load('traffic_sign_dataset.mat'); % 包含train_data/train_labels
% 數據劃分
cv = cvpartition(size(train_data,1),'HoldOut',0.3);
train_set = train_data(cv.training,:);
test_set = train_data(cv.test,:);
train_labels = train_labels(cv.training);
test_labels = train_labels(cv.test);
% 訓練SVM模型
svm_model = fitcsvm(train_set, train_labels, ...
'KernelFunction', 'rbf', ...
'BoxConstraint', 100, ...
'KernelScale', 'auto');
% 交叉驗證評估
cv_model = crossval(svm_model, 'KFold', 5);
accuracy = 1 - kfoldLoss(cv_model);
disp(['交叉驗證準確率: ', num2str(accuracy*100), '%']);三、檢測識別流程
3.1 候選區域檢測流程
- MSER區域提取:檢測圖像中穩定極值區域
regions = detectMSERFeatures(gray_img, 'RegionAreaRange', [200 8000]);- 區域過濾:
- 面積閾值:200-8000像素
- 幾何約束:圓形度C∈矩形度R∈
- 顏色一致性:與分割掩膜重疊度>70%
3.2 分類決策流程
function label = classify_region(region_img, svm_model)
% 特徵提取
hog_feat = extract_hog(region_img);
% 分類預測
[~, score] = predict(svm_model, hog_feat);
[~, max_idx] = max(score);
% 類別映射(示例)
label_map = containers.Map({1,2,3}, {'禁止', '指示', '警告'});
label = label_map{max_idx};
end參考代碼 利用SVM與hog特徵,對交通標誌進行檢測和識別 www.youwenfan.com/contentcsk/59986.html
四、實驗結果分析
5.1 數據集配置
|
數據集 |
樣本數 |
類別數 |
圖像尺寸 |
|
GTSRB |
39,209 |
43 |
30×30 |
|
TT100K |
21,000 |
62 |
64×64 |
5.2 性能指標
|
指標 |
本方法 |
HOG+SVM傳統方法 |
提升幅度 |
|
準確率 |
92.3% |
88.7% |
+4.0% |
|
檢測速度 |
23FPS |
18FPS |
+27.8% |
|
誤檢率 |
1.2% |
3.5% |
-65.7% |
|
遮擋魯棒性 |
82% |
68% |
+20.6% |
本文章為轉載內容,我們尊重原作者對文章享有的著作權。如有內容錯誤或侵權問題,歡迎原作者聯繫我們進行內容更正或刪除文章。