從零搭建麥輪小車
繪製3D模型(Solidworks建模)
全圖

部件圖
電機

共軸器

麥克納姆輪

實物圖

硬件電路搭建
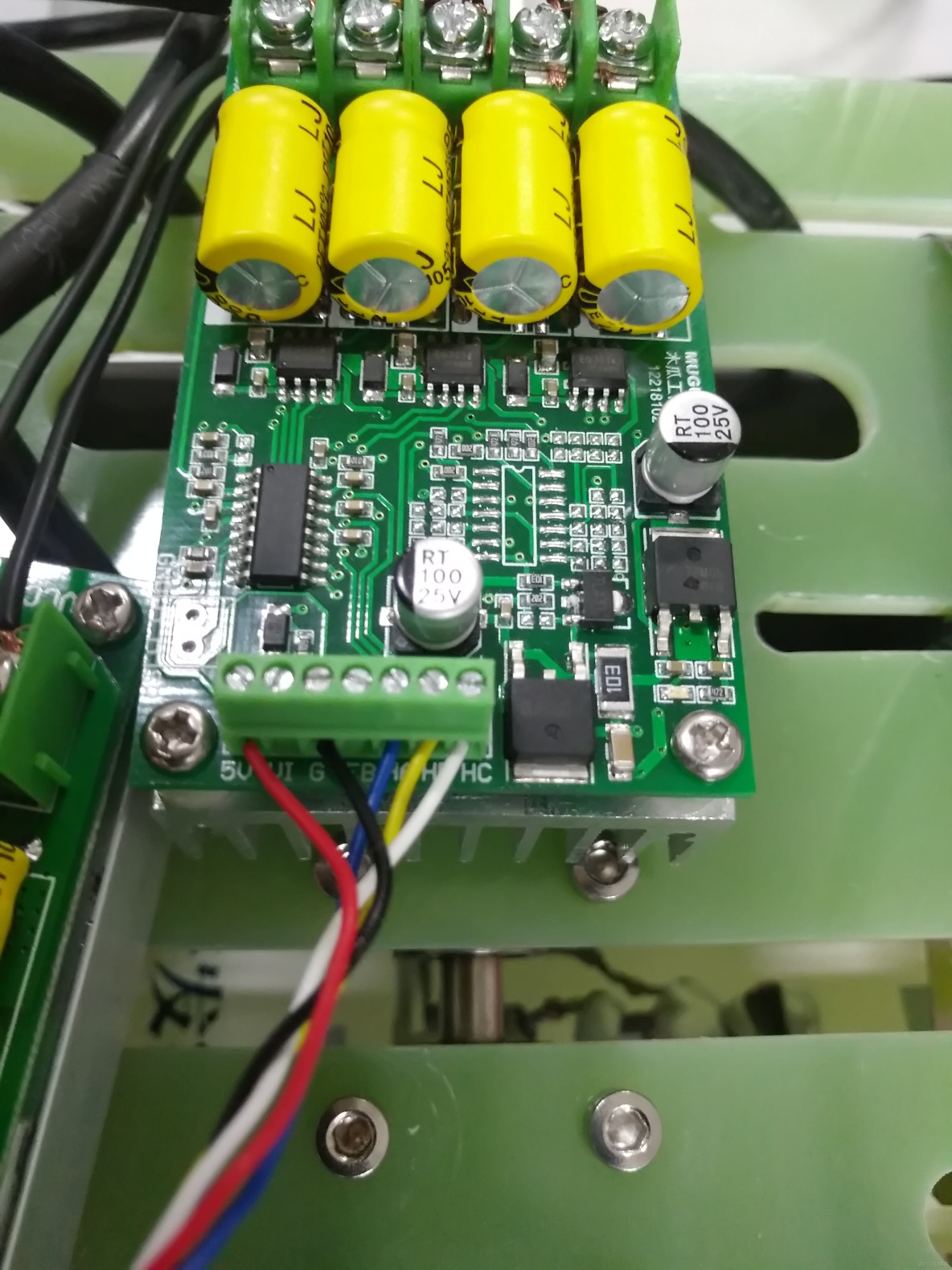
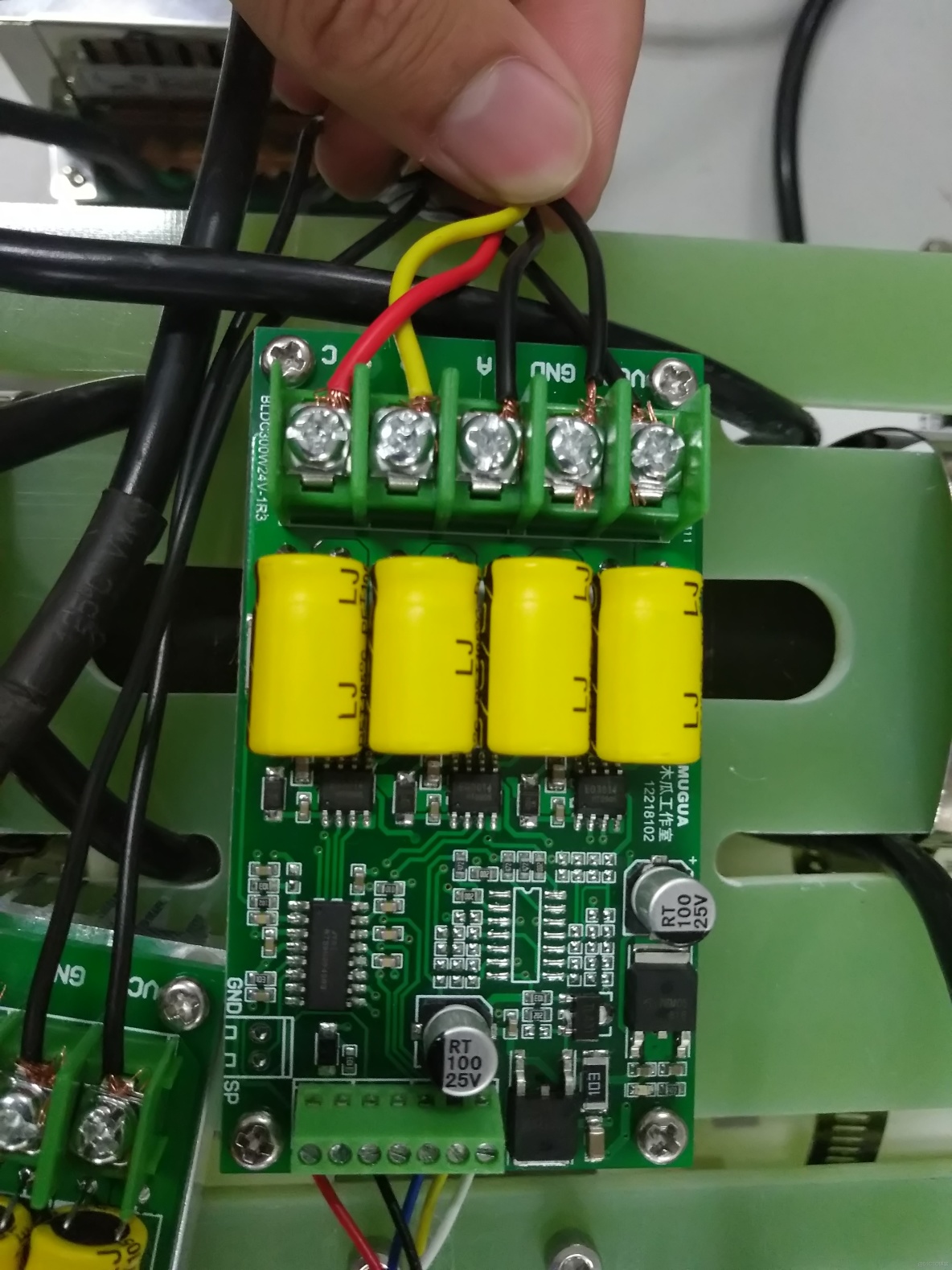
驅動器
選用的是BLDC300W24V直流無刷控制器,有霍爾版本。通過PWM佔空比控制速度

接線示意圖
驅動器端

電機端

實物連接圖
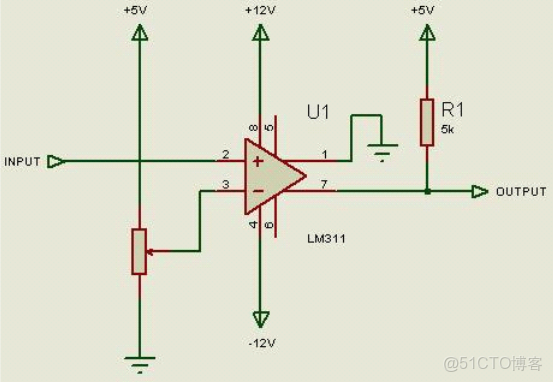
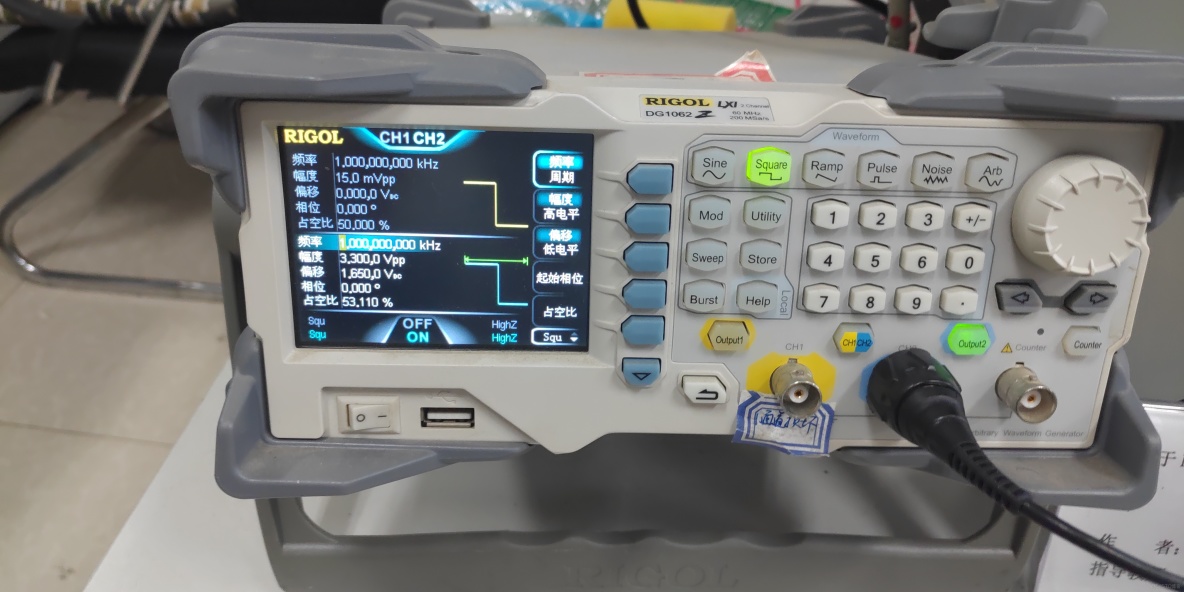
脈衝反饋整形電路
由於驅動器的霍爾反饋輸出存在較多毛刺,不利於後面做處理,故使用整形電路。
實物圖

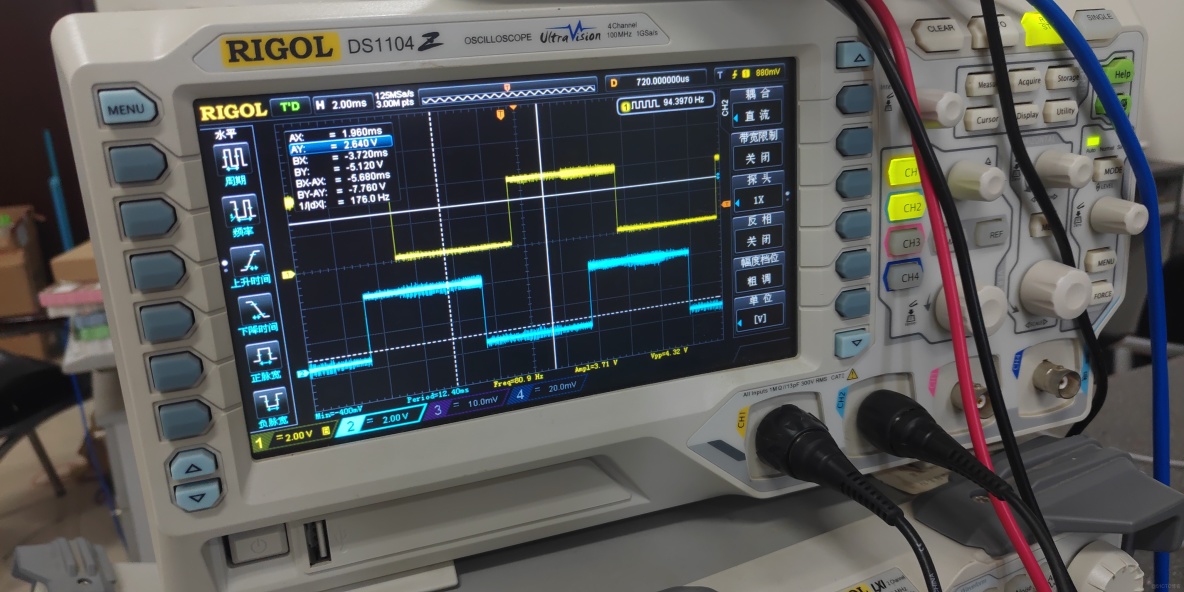
波形圖
驅動器PWM輸入
霍爾反饋整形後輸出
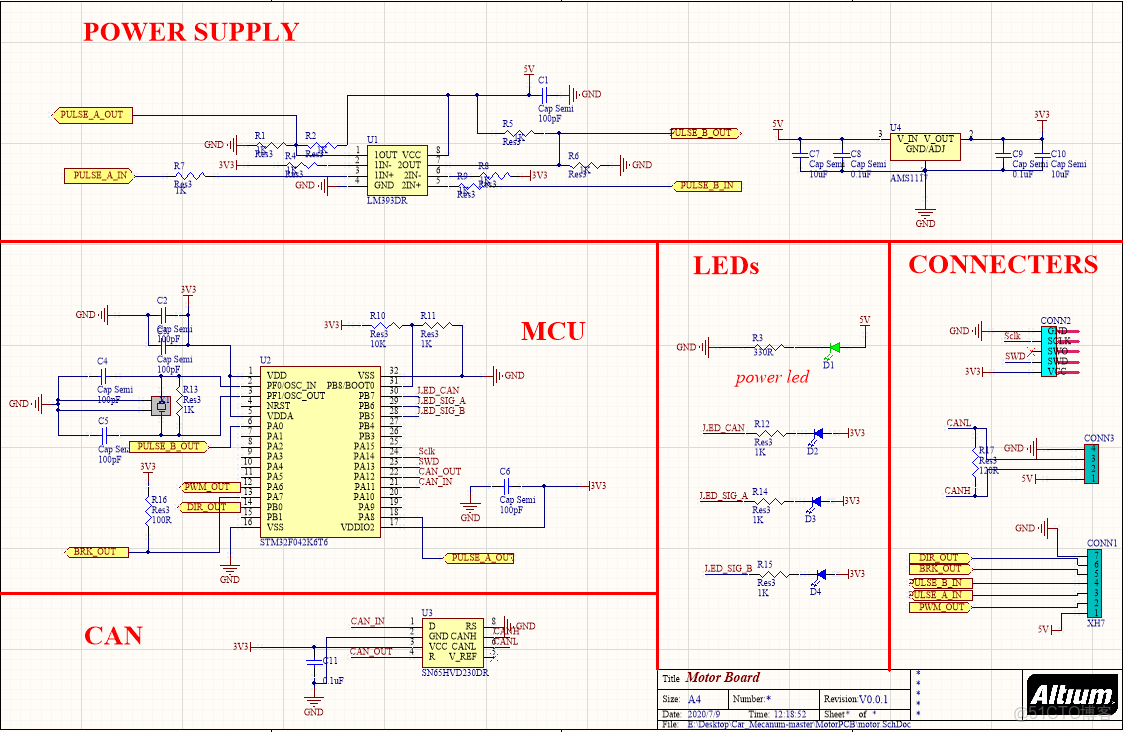
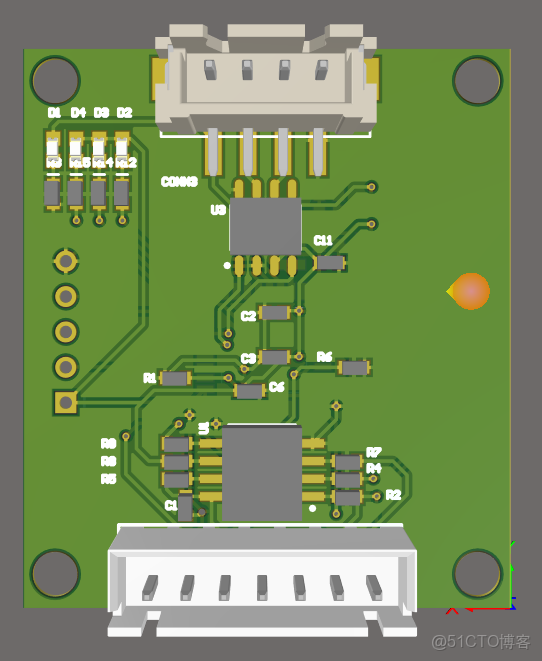
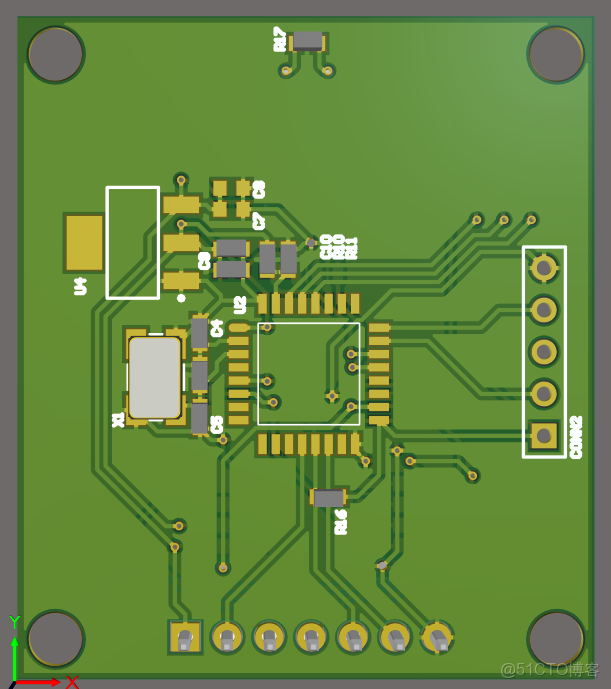
PCB電路
由於時間問題,這個板子沒有做出來
原理圖
3維圖
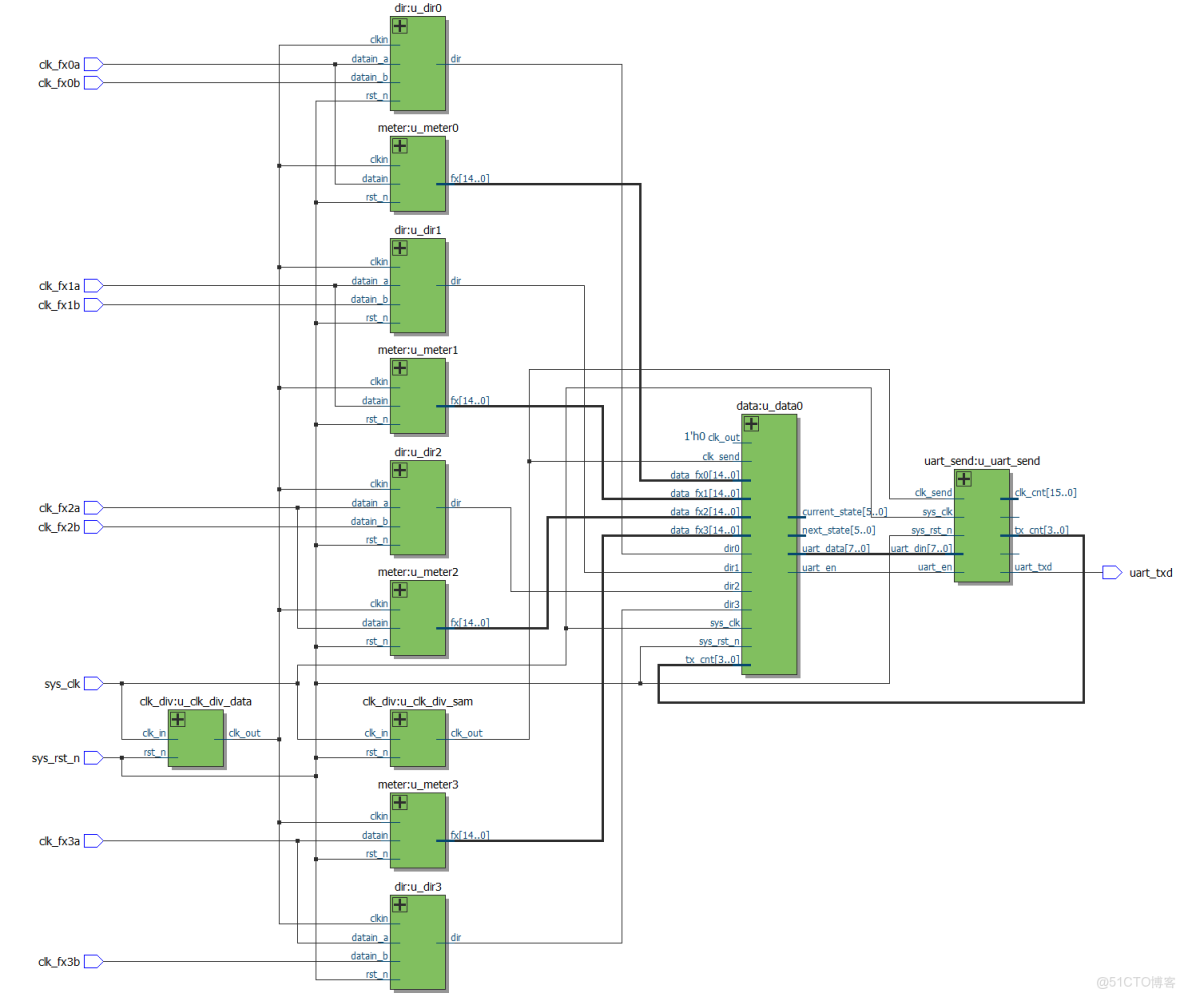
FPGA脈衝-轉速轉換
原理
根據測量發現,轉速反饋最高頻率為200hz,故可以採用定時計脈衝的方式得到速度。
FPGA分頻得到基準時鐘,然後記錄中脈衝個數,得到速度。
FPGA框圖
具體實現
上升沿計數
always @ (posedge clkin or negedge rst_n)
begin
if(!rst_n) datatmp = 2'b0;
else datatmp = {datain,datatmp[1]};
end
always @ (posedge clkin or negedge rst_n)
begin
if(!rst_n) cnt = 36'b0;
else if(datatmp == 2'b10) //上升沿
begin
cnt = cnttmp + 1'b1;
cnttmp = 36'b0;
end
else
cnttmp = cnttmp + 1'b1;
end轉速換算
always @ (posedge clkin or negedge rst_n)
begin
if(!rst_n) fx = 15'b0;
else if ( 36'd5000 < cnt && cnt < 36'd100000 && cnttmp < 36'd100000)
fx <= 36'd1_0000_0000 / cnt; //100 ~ 2000
else
fx <= 0;
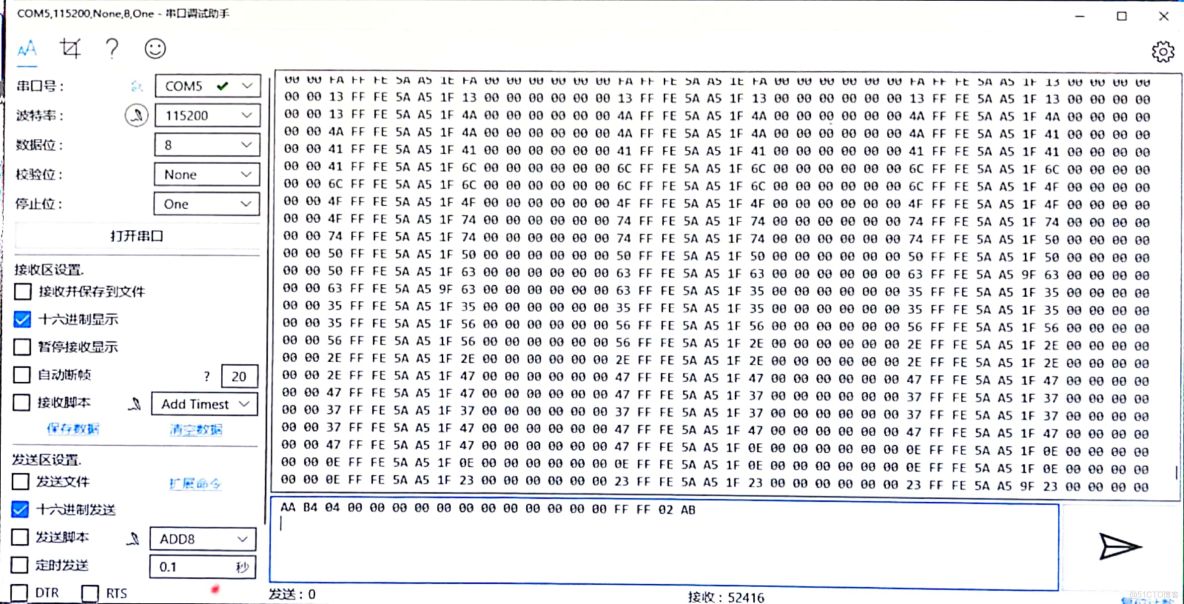
end實物圖
使用正點原子-新起點開發板 做測試,後面採用最簡系統板。
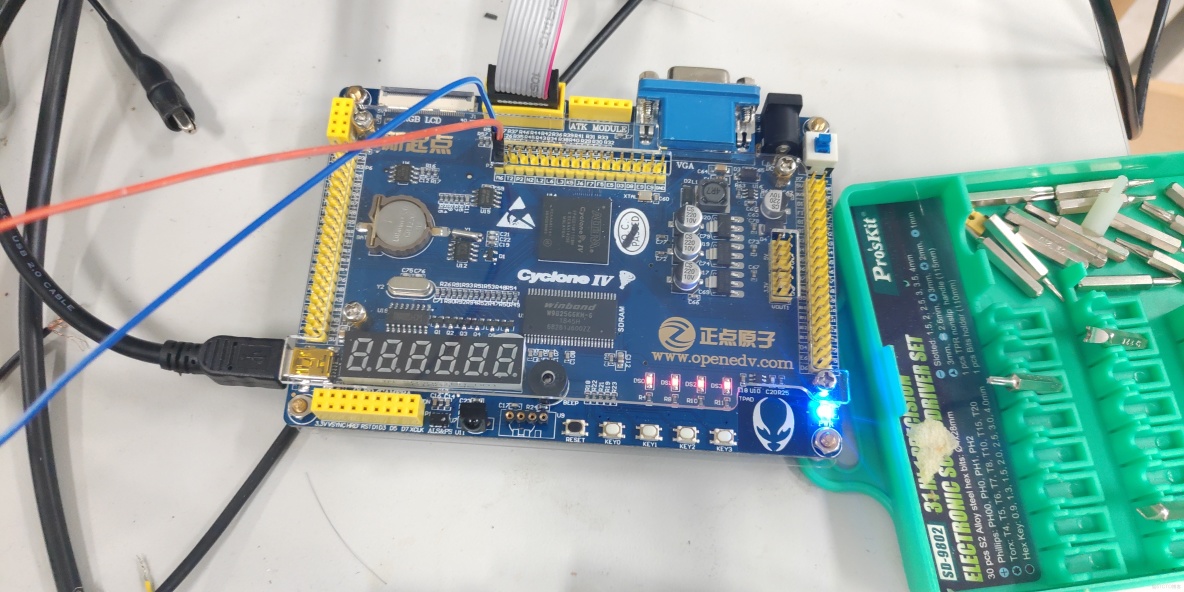
轉速輸出
STM32控制程序
主要部分
設置電機轉速
void Set_Wheel_Speed(int16_t target,CAR_WHEEL *wheel,PID_GENERAL *pid,uint8_t Wheel_Num)
{
Wheel_PID(wheel->speed,target,pid);
switch(Wheel_Num)
{
case W_LF:
if(pid->output > 0)
{
DIR_CTL_LF(Bit_SET);
PWM_F_L(fabs(pid->output));
}
else {
DIR_CTL_LF(Bit_RESET);
PWM_F_L(fabs(pid->output));
}
break;
case W_RF:
if(pid->output > 0)
{
DIR_CTL_RF(Bit_SET);
PWM_F_R(fabs(pid->output));
}
else {
DIR_CTL_RF(Bit_RESET);
PWM_F_R(fabs(pid->output));
}
break;
case W_LB:
if(pid->output > 0)
{
DIR_CTL_LB(Bit_SET);
PWM_B_L(fabs(pid->output));
}
else {
DIR_CTL_LB(Bit_RESET);
PWM_B_L(fabs(pid->output));
}
break;
case W_RB:
if(pid->output > 0)
{
DIR_CTL_RB(Bit_SET);
PWM_B_R(fabs(pid->output));
}
else {
DIR_CTL_RB(Bit_RESET);
PWM_B_R(fabs(pid->output));
}
break;
default: break;
}
}遙控器控制
void Motor_Control(void)
{
static int16_t channel_1 = 0,channel_2 = 0,channel_4 = 0;//channel_3 = 0
channel_1 = -rc_data.Channel_Current[2]/800.0f*10000*0.5f; //throttle
channel_2 = rc_data.Channel_Current[0]/800.0f*10000*0.5f; //rotate
//channel_3 = rc_data.Channel_Current[1]/800.0f*10000*0.5f; // no use
channel_4 = -rc_data.Channel_Current[3]/800.0f*10000*0.5f; //shift-left/right
Set_Wheel_Speed(channel_1-channel_4-channel_2,&Car_Wheel_LF,&PID_LF,W_LF);//-
Set_Wheel_Speed(-channel_1-channel_4-channel_2,&Car_Wheel_RF,&PID_RF,W_RF);
Set_Wheel_Speed(channel_1+channel_4-channel_2,&Car_Wheel_LB,&PID_LB,W_LB);//-
Set_Wheel_Speed(-channel_1+channel_4-channel_2,&Car_Wheel_RB,&PID_RB,W_RB);
}最後

本文章為轉載內容,我們尊重原作者對文章享有的著作權。如有內容錯誤或侵權問題,歡迎原作者聯繫我們進行內容更正或刪除文章。