前言
本篇文章介紹的是ROS高效進階內容,使用URDF 語言(xml格式)做一個差速輪式機器人模型,並使用URDF的增強版xacro,對機器人模型文件進行二次優化。
差速輪式機器人:兩輪差速底盤由兩個動力輪位於底盤左右兩側,兩輪獨立控制速度,通過給定不同速度實現底盤轉向控制。一般會配有一到兩個輔助支撐的萬向輪。
此次建模,不引入算法,只是把機器人模型的樣子做出來,所以只使用 rivz 進行可視化顯示。
機器人的定義和構成
- 機器人定義:機器人是一種自動化的機器,所不同的是這種機器具備一些與人或生物相似的智能能力,如感知能力、規劃能力、動作能力和協同能力,是一種具有高級靈活性的自動化機器。目前,自動駕駛汽車也被認為是一種機器人。
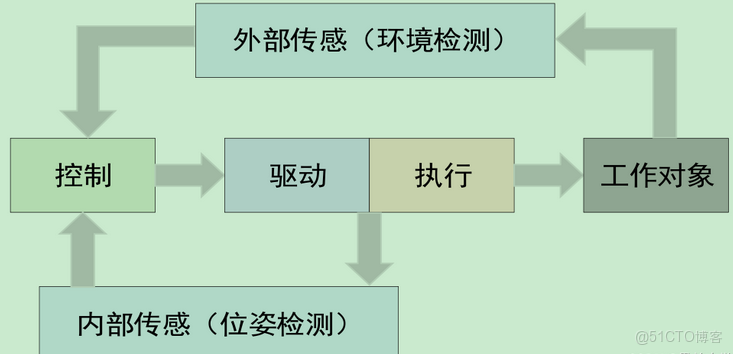
- 機器人構成:機器人通常分為四大部分,即執行機構,驅動系統,傳感系統和控制系統。以自動駕駛汽車為例,執行機構就是油門,轉向和剎車;驅動系統就是電動機;傳感系統就是各種傳感器:lidar,radar,camera,uss,imu,GNSS;控制系統就是智駕算法系統:感知,定位,規劃和控制。
- 機器人四大部分的控制迴路,大致如圖: