波特圖(Bode Plot)是一種用於描述線性控制系統頻率響應的圖形表示方法,通常用於分析和設計控制系統。它以控制系統的傳遞函數(或頻域傳遞函數)為基礎,將系統的幅頻特性(振幅-頻率響應)和相頻特性(相位-頻率響應)以圖形的方式展示出來。可以根據波特圖理解和評估系統的穩定性、性能和魯棒性。
波特圖可以指導控制器的設計。通過調整控制器的參數,可以改變系統的頻率響應,以滿足特定的性能要求。波特圖提供了反饋信息,幫助選擇合適的控制器類型和參數,以達到期望的控制效果。本文使用串聯超前校正、串聯滯後校正、滯後-超前校正及PID校正,進行控制器的設計。
三頻段理論:

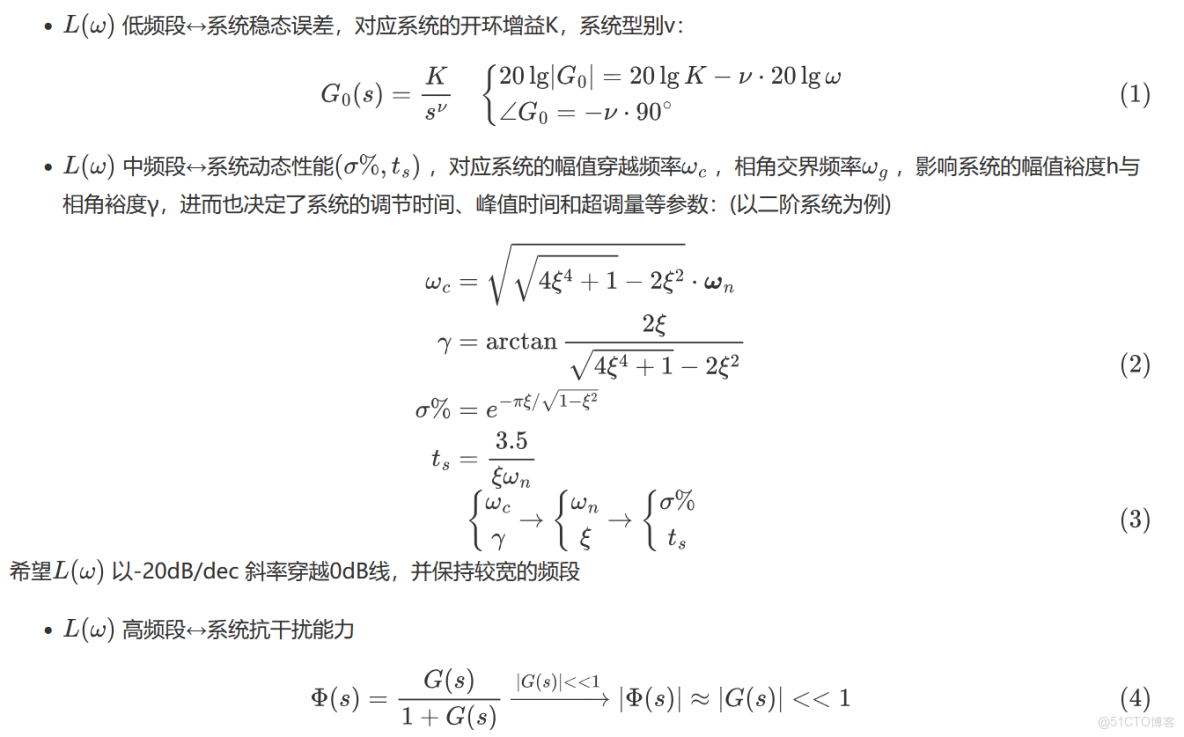
頻率法串聯校正
控制系統串聯校正是一種用於改善控制系統性能的校正方法。在控制系統中,由於傳感器、執行器、信號傳輸等因素的影響,系統可能出現響應速度慢、精度不高、穩定性差等問題。串聯校正通過在控制系統中插入合適的校正環節,對系統進行調整和校正,以提高系統的響應和控制性能。
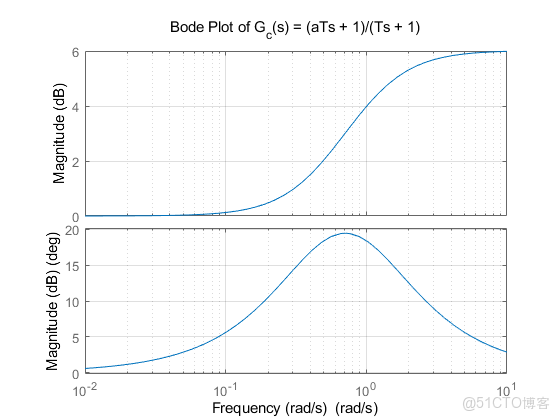
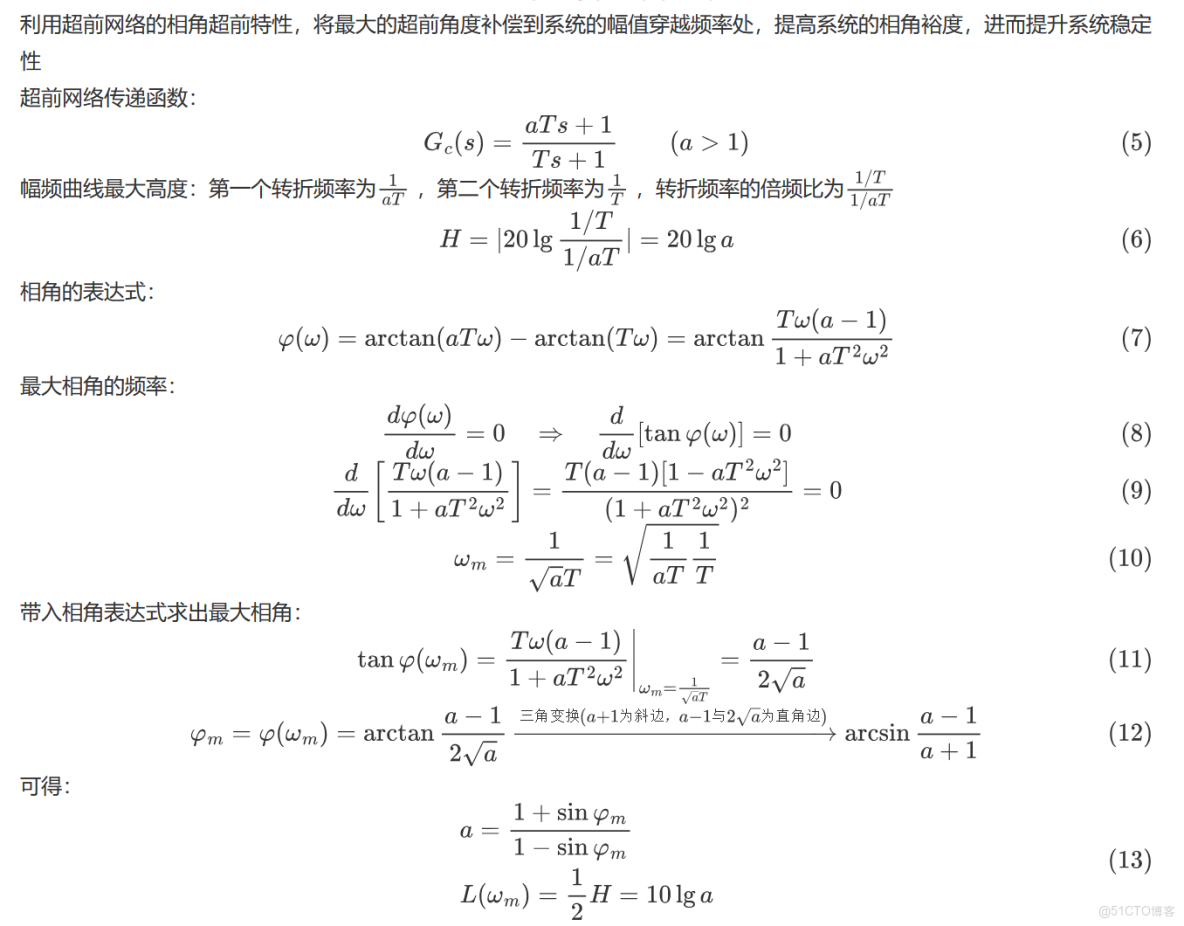
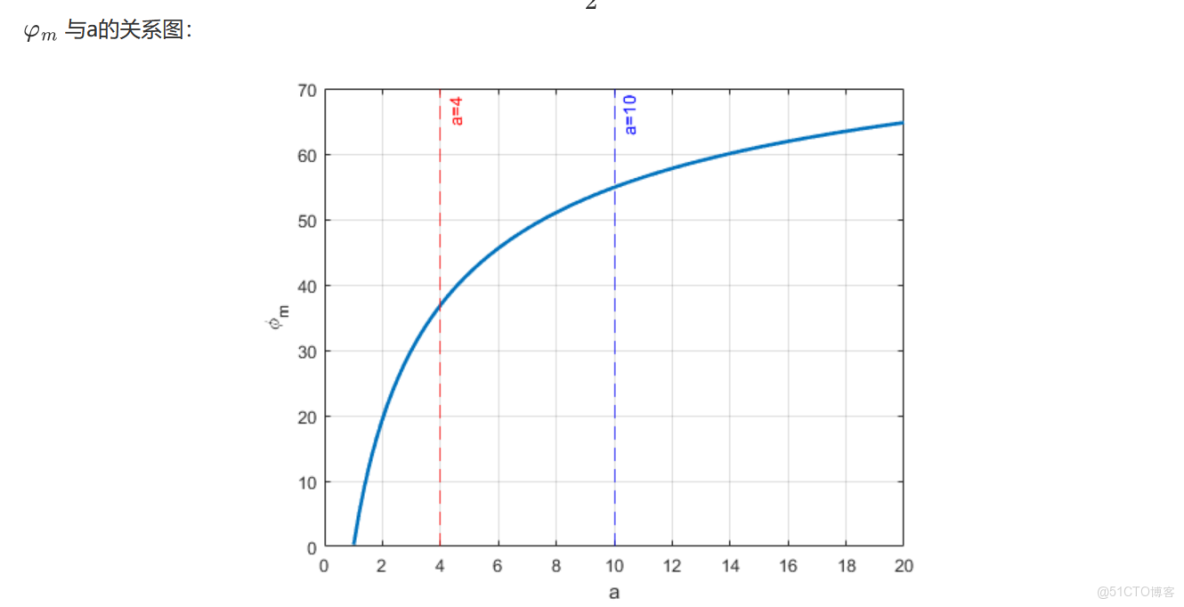
串聯超前校正
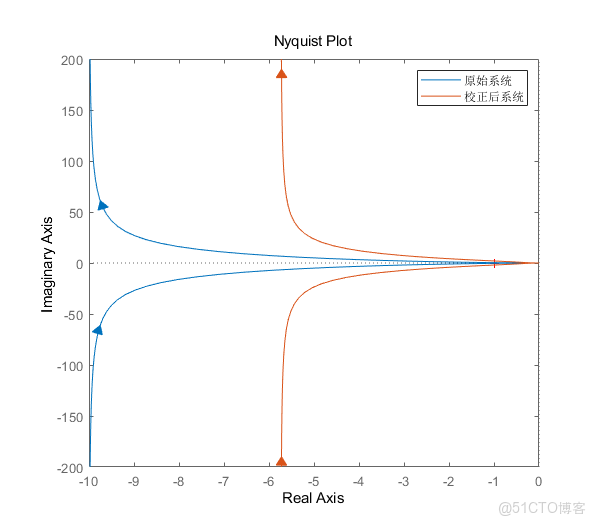
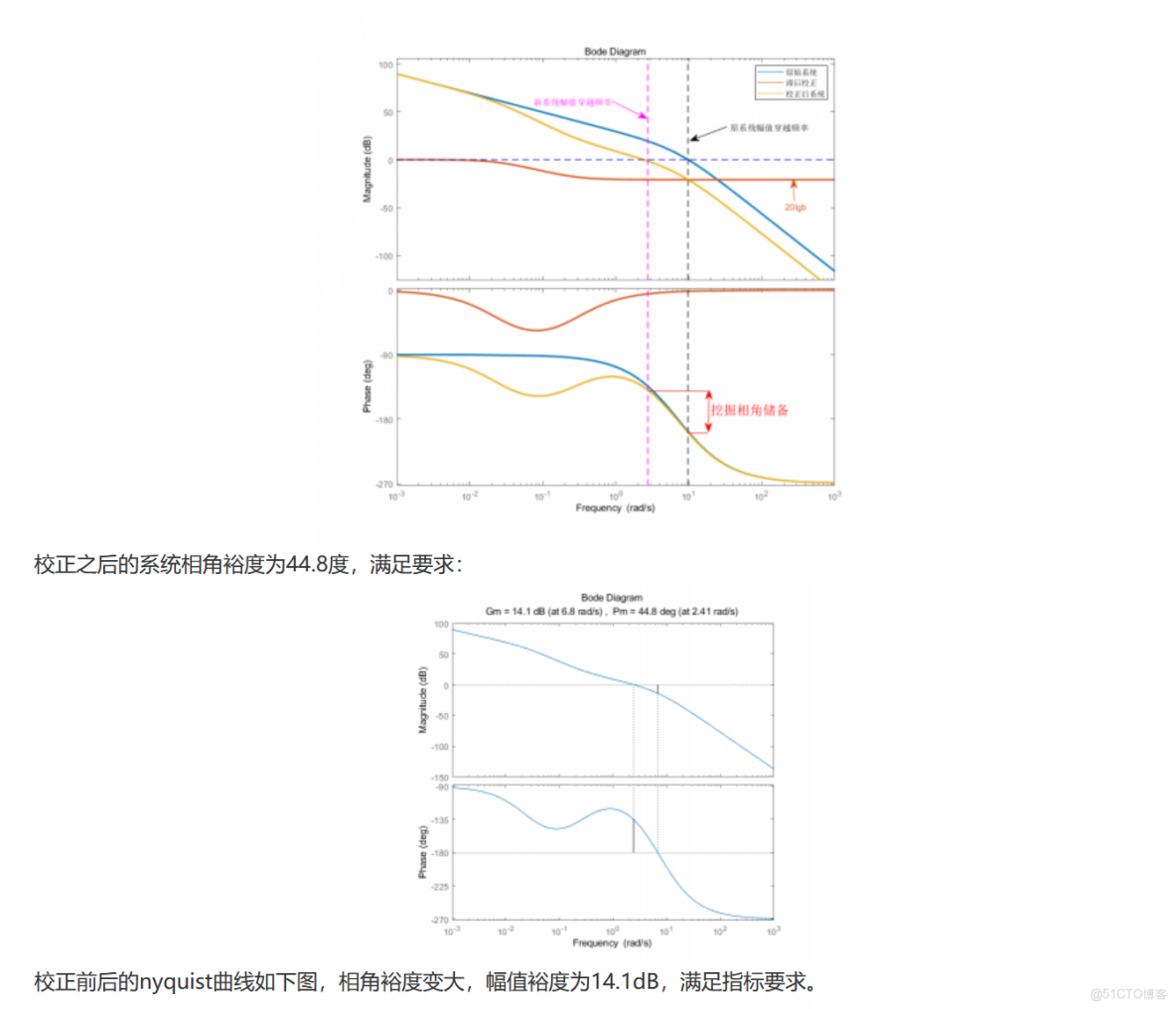
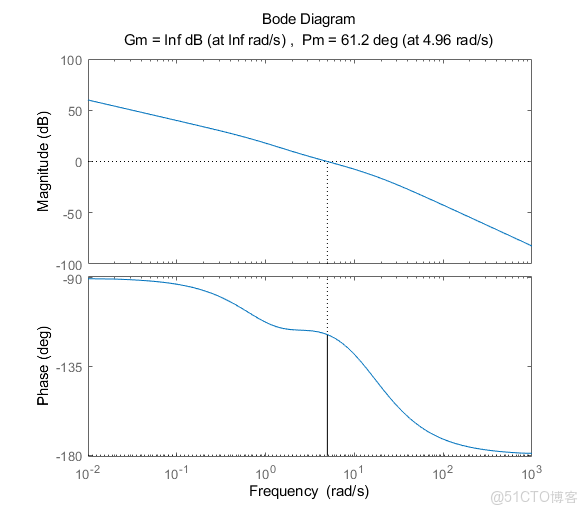
校正之後的系統相角裕度為61.2度,滿足要求:
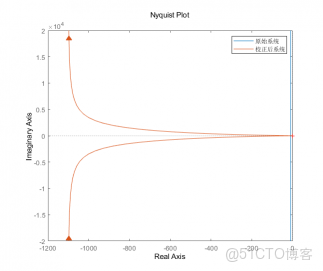
校正前後的nyquist曲線如下圖,相角裕度變大,幅值裕度為infdB,滿足指標要求。