1. 無刷電機驅動原理
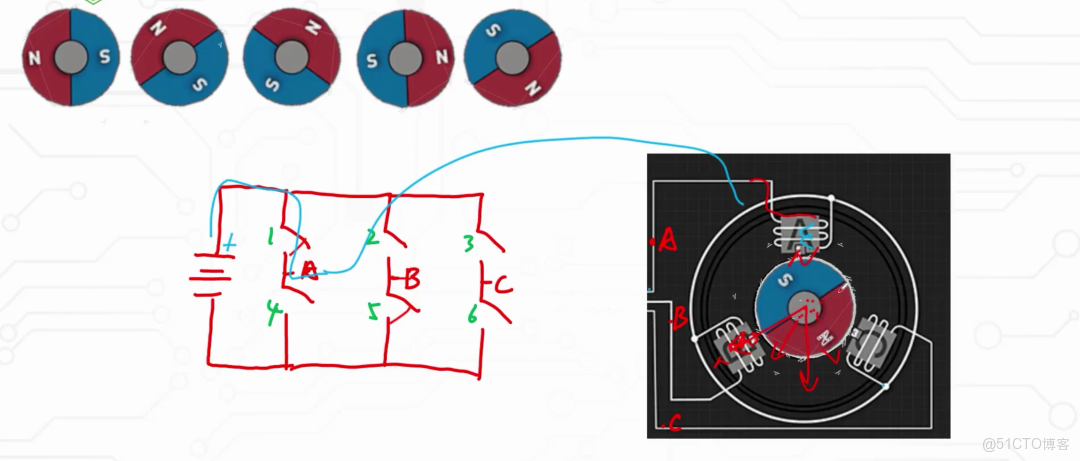
上方開關是 n 極,中間是控制的相,下面開關是 s 極,兩個電磁鐵共同作用轉動轉子。
工作原理
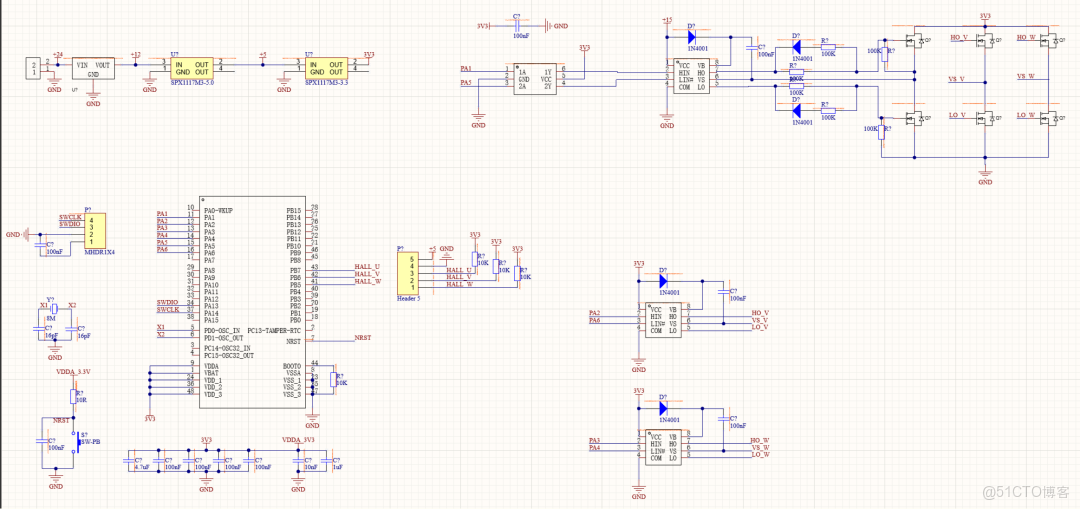
- 電源電路為整個系統供電
- 霍爾傳感器檢測無刷電機轉子的位置,產生位置信號
- 單片機接收位置信號,經過邏輯判斷,生成相應的控制信號
- 三相橋根據控制信號,將直流電源轉換為三相交流電,驅動無刷電機的三相繞組
- 電機根據三相電流的變化產生旋轉運動
2. 無刷電機驅動電路的基本框架設計
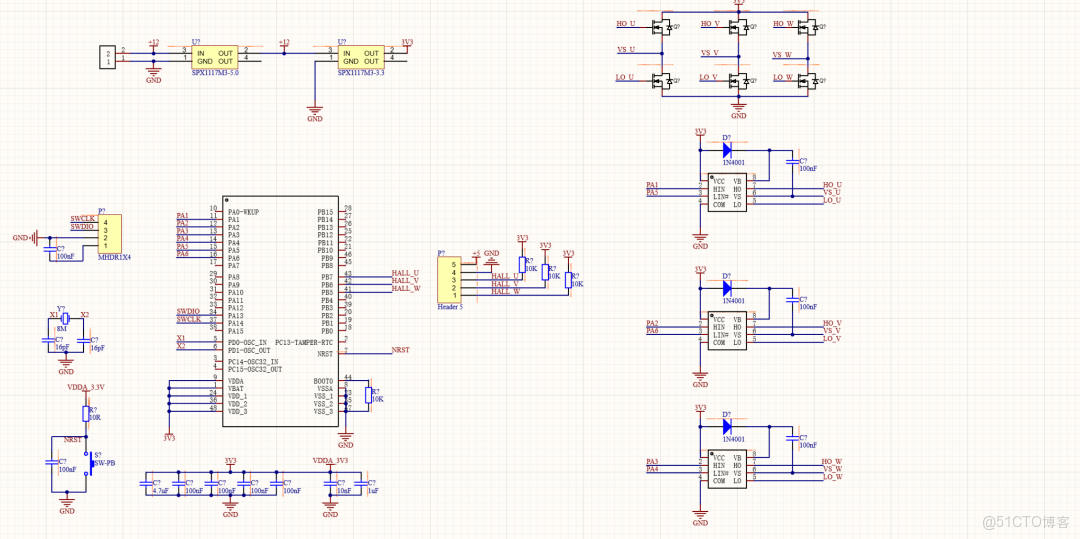
核心是用 MCU採集霍爾信號、輸出驅動指令,經半橋驅動芯片控制功率 MOS 管,實現電機調速 / 換向。
設計產品時,先根據產品需求,設計基本功能,再不斷完善
3. 無刷電機主迴路設計
隔離方式
- 電阻
- 二極管
- 緩衝器
- 光耦
為什麼要隔離
防止浪涌 or 靜電反向倒灌損壞MCU
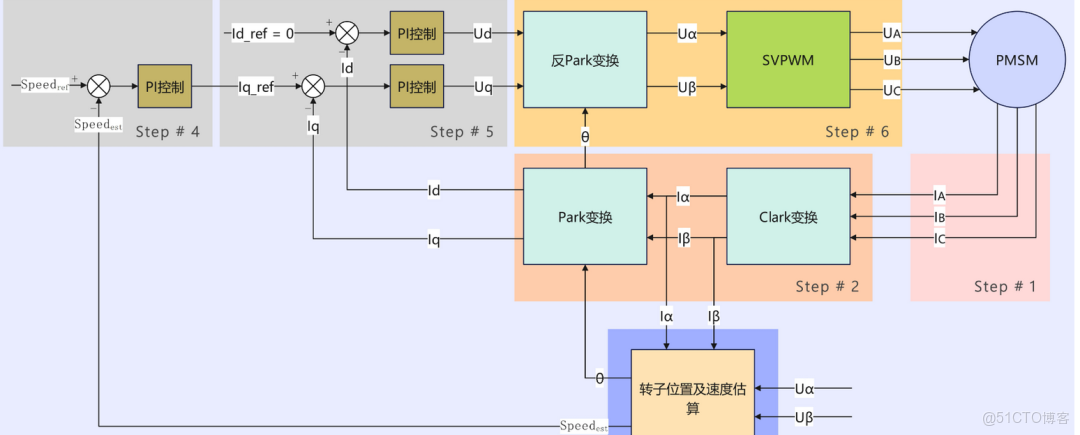
FOC算法介紹
為了能對電機進行更精準的控制,令其以任意速度旋轉,停留在任意位置,可以任意調節其扭矩。FOC控制則是一種更為精確、先進的控制方式。它將電機的空間磁場分解成水平和垂直兩個分量,然後對這兩個磁場分量分別進行控制。
通過調節兩個磁場分量的大小和相位差,就可以實現對電機的精確控制,包括轉速、轉矩、效率等方面。相對於六步換相控制,FOC控制可以使電機效率更高,噪音更小,並且可以實現更佳的控制性能。缺點是FOC控制需要更高的計算能力和控制算法,因此複雜度比六步控制要高,對控制芯片會有更高的要求。
核心原理
- 座標變換是核心,將三相靜止座標系的電流轉換為兩相旋轉座標系(d/q 軸)。
- d 軸控制勵磁電流,維持電機磁鏈穩定;q 軸控制轉矩電流,直接決定電機輸出轉矩。
- 通過閉環調節使 d/q 軸電流獨立可控,實現轉矩和轉速的精準控制。
座標變換公式
- Clarke 變換(三相靜止→兩相靜止 αβ 軸):
- iα = (2/3)×(ia - 0.5ib - 0.5ic)
- iβ = (2/3)×[(√3/2) ib - (√3/2) ic](注:無中性線時,ia + ib + ic = 0,可簡化計算)
- Park 變換(兩相靜止 αβ→兩相旋轉 dq 軸):
-
id = iα×cosθ + iβ×sinθ
-
iq = -iα×sinθ + iβ×cosθ
-
逆 Park 變換(兩相旋轉 dq→兩相靜止 αβ 軸):
-
uα = ud×cosθ - uq×sinθ
-
uβ = ud×sinθ + uq×cosθ
2. 電流閉環 PI 調節公式
- 比例積分調節核心式:
- ud = Kp_d×(id_ref - id) + Ki_d×∫(id_ref - id)dt + Ud0
- uq = Kp_q×(iq_ref - iq) + Ki_q×∫(iq_ref - iq) dt + Uq0(Kp_d/Ki_d 為 d 軸 PI 參數,Kp_q/Ki_q 為 q 軸 PI 參數;Ud0/Uq0 為前饋補償項)
3. 轉矩與轉速相關公式
- 電磁轉矩公式:Te = (3/2)×p×ψf×iq(p 為電機極對數,ψf 為永磁體磁鏈)
- 轉速計算(差分法):n = (θk - θk-1)/Δt × (60/(2πp))(θk 為當前電角度,θk-1 為上一時刻電角度,Δt 為採樣週期)