

優先級翻轉曾導致 1997 年火星探路者號(Mars Pathfinder)任務故障,是 RTOS 開發中必須掌握的經典問題。本文通過 RT-Thread 實驗,徹底搞清楚它的原理和解決方案。
火星探路者號故障原文鏈接:
- https://www.reddit.com/r/programming/comments/dcbnbd/a_rather_interesting_account_of_the_mars/?tl=zh-hans
- https://users.cs.duke.edu/~carla/mars.html
一、什麼是優先級翻轉?
定義: 高優先級任務被低優先級任務間接阻塞,導致系統行為違反優先級調度原則。簡單説:高優先級任務反而要等低優先級任務執行完,優先級"翻轉"了。
經典場景
假設系統中有三個任務:
| 任務 | 優先級 | 説明 |
|---|---|---|
| Task_H | 8 (最高) | 實時性要求高 |
| Task_M | 15 (中等) | CPU 密集型任務 |
| Task_L | 22 (最低) | 持有共享資源 |
注:RT-Thread 中數值越小優先級越高
翻轉發生過程:
時間線
──────────────────────────────────────────────────────────────►
1. Task_L 運行,獲取鎖(信號量)
2. Task_H 就緒,搶佔 Task_L,嘗試獲取鎖 → 阻塞等待
3. Task_L 恢復運行...但此時 Task_M 就緒
Task_M 優先級比 Task_L 高 → 搶佔 Task_L!
4. 問題發生:
- Task_H(最高優先級)在等鎖
- Task_L(持有鎖)被 Task_M 搶佔,無法運行
- Task_M(中優先級)卻在運行!
結果:Task_H 被 Task_M 間接阻塞 —— 優先級翻轉!
二、為什麼這是嚴重問題?
- 實時性破壞:高優先級任務的響應時間變得不可預測
- 無界延遲:如果有多箇中優先級任務,Task_H 可能被無限期延遲
- 系統失效:火星探路者號就因此不斷重啓
三、解決方案:優先級繼承
原理
當高優先級任務等待低優先級任務持有的資源時,臨時提升低優先級任務的優先級到與等待者相同的級別。
修正後的時序:
1. Task_L 持有鎖(優先級 22)
2. Task_H 請求鎖 → 阻塞
3. 系統檢測到優先級翻轉風險 :
→ Task_L 的優先級臨時提升到 8(與 Task_H 相同)
4. Task_M 就緒(優先級 15),但 Task_L 現在優先級是 8
→ 15 > 8,Task_M 無法搶佔 Task_L
5. Task_L 完成臨界區,釋放鎖
→ Task_L 優先級恢復為 22
6. Task_H 獲得鎖,立即運行
7. Task_H 完成後,Task_M 才開始運行
RT-Thread 中的實現
關鍵點:RT-Thread 的 rt_mutex 默認支持優先級繼承!
/* 互斥鎖 - 自動支持優先級繼承 */
rt_mutex_t mutex = rt_mutex_create("mutex", RT_IPC_FLAG_PRIO);
/* 信號量 - 沒有優先級繼承! */
rt_sem_t sem = rt_sem_create("sem", 1, RT_IPC_FLAG_PRIO);
四、實驗驗證
實驗設計
編寫一個 Demo,分別使用信號量和互斥鎖作為鎖機制,對比兩種情況下的任務執行順序和等待時間。
核心代碼:
#include <rtthread.h>
/* 配置:0=信號量(會翻轉), 1=互斥鎖(有繼承) */
#define USE_MUTEX 0
/* 任務優先級 */
#define PRIO_HIGH 8
#define PRIO_MEDIUM 15
#define PRIO_LOW 22
#if USE_MUTEX
static rt_mutex_t g_lock;
#else
static rt_sem_t g_lock;
#endif
/* 高優先級任務 */
static void thread_high_entry(void *param)
{
rt_thread_mdelay(50); /* 確保 Task_L 先獲取鎖 */
log_msg("Task_H", "Try to acquire lock...");
#if USE_MUTEX
rt_mutex_take(g_lock, RT_WAITING_FOREVER);
#else
rt_sem_take(g_lock, RT_WAITING_FOREVER);
#endif
log_msg("Task_H", ">>> GOT LOCK! <<<");
/* ... 工作 ... */
#if USE_MUTEX
rt_mutex_release(g_lock);
#else
rt_sem_release(g_lock);
#endif
}
/* 中優先級任務 - CPU 密集型,不使用鎖 */
static void thread_medium_entry(void *param)
{
rt_thread_mdelay(80); /* 在 Task_H 阻塞後啓動 */
log_msg("Task_M", "=== START! Busy loop ===");
/* 忙等待,佔用 CPU */
for (int i = 0; i < 5; i++) {
volatile uint32_t cnt = 0;
while (cnt < 2000000) cnt++;
}
log_msg("Task_M", "=== DONE ===");
}
/* 低優先級任務 - 持有鎖 */
static void thread_low_entry(void *param)
{
#if USE_MUTEX
rt_mutex_take(g_lock, RT_WAITING_FOREVER);
#else
rt_sem_take(g_lock, RT_WAITING_FOREVER);
#endif
log_msg("Task_L", "GOT lock, working...");
/* 臨界區:忙等待 ~240ms */
for (int i = 0; i < 8; i++) {
volatile uint32_t cnt = 0;
while (cnt < 800000) cnt++;
}
log_msg("Task_L", "Release lock");
#if USE_MUTEX
rt_mutex_release(g_lock);
#else
rt_sem_release(g_lock);
#endif
}
實驗結果
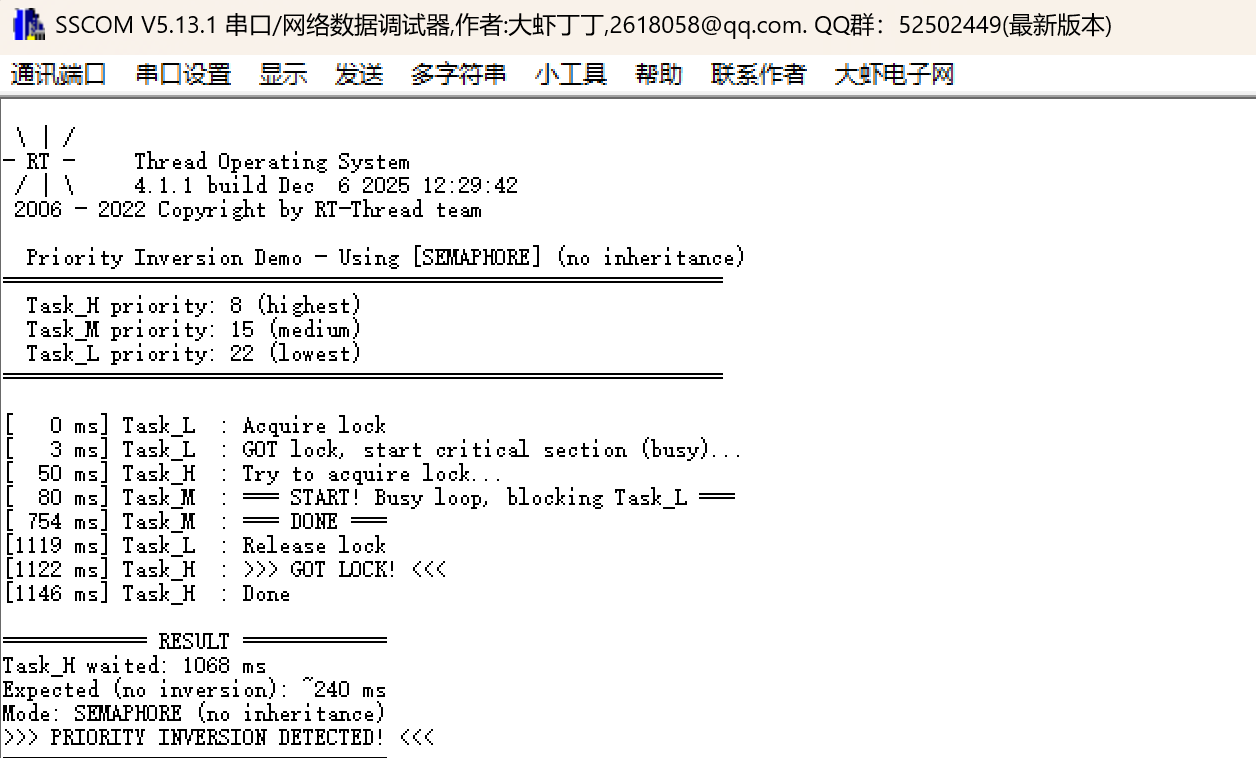
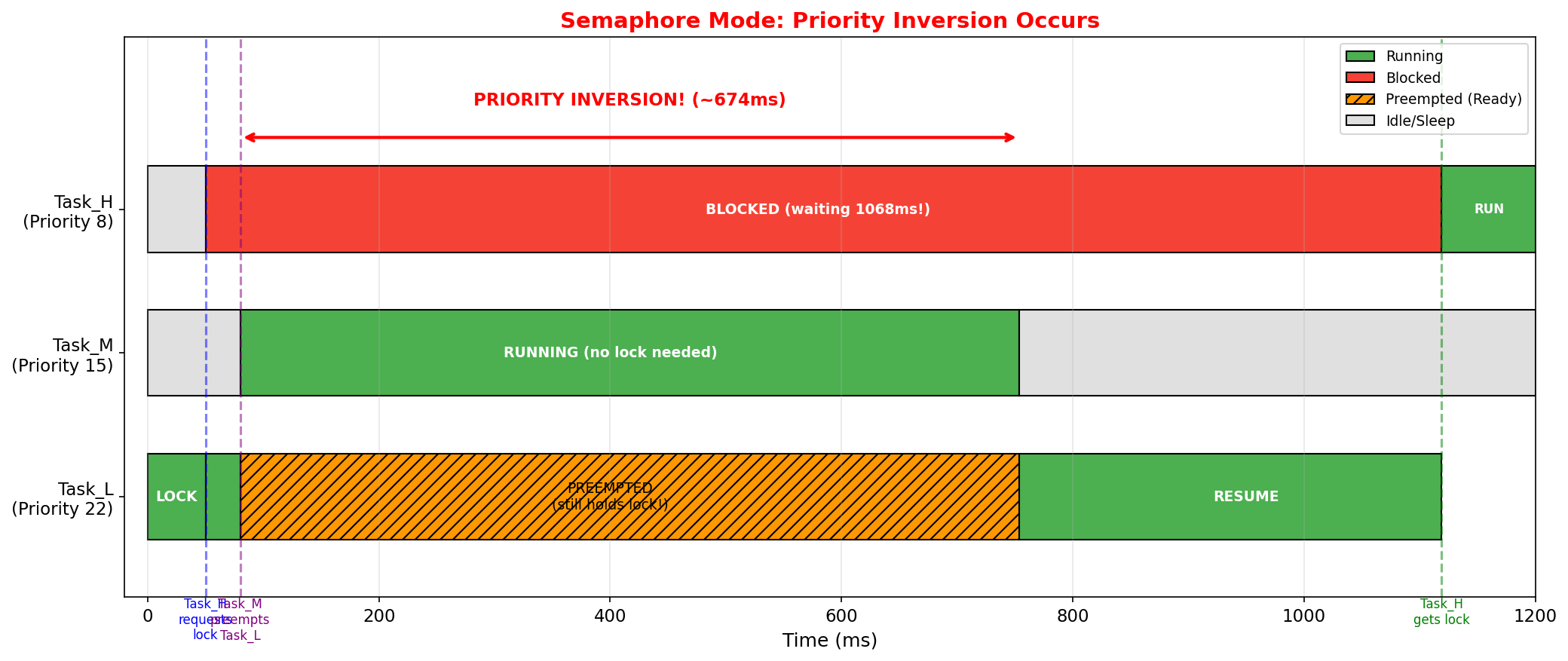
信號量模式(USE_MUTEX = 0)—— 發生優先級翻轉
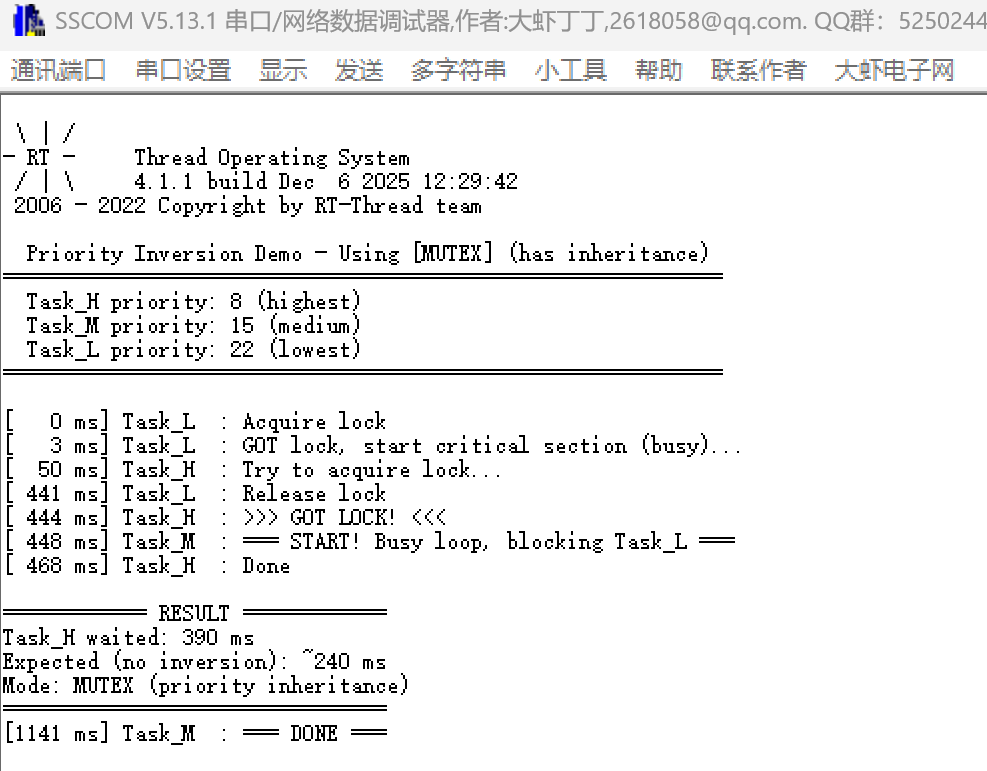
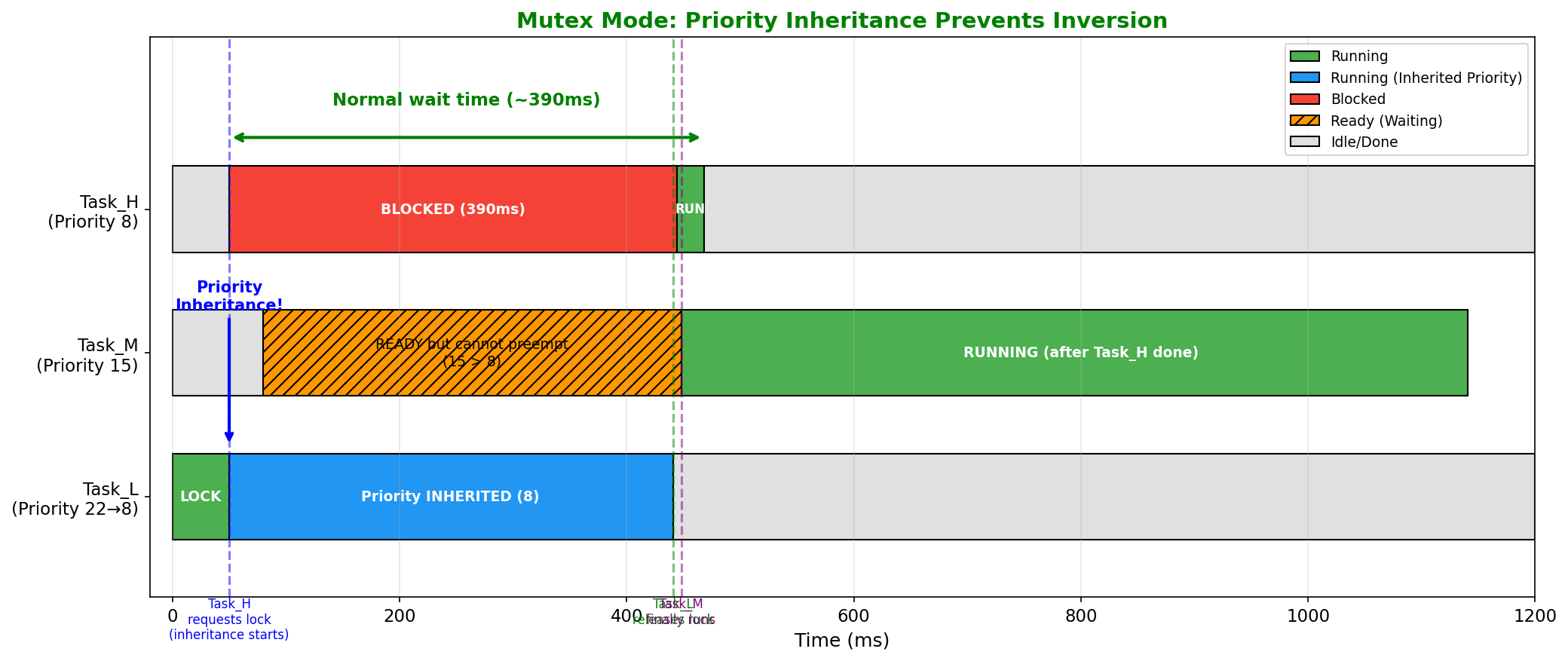
互斥鎖模式(USE_MUTEX = 1)—— 優先級繼承生效
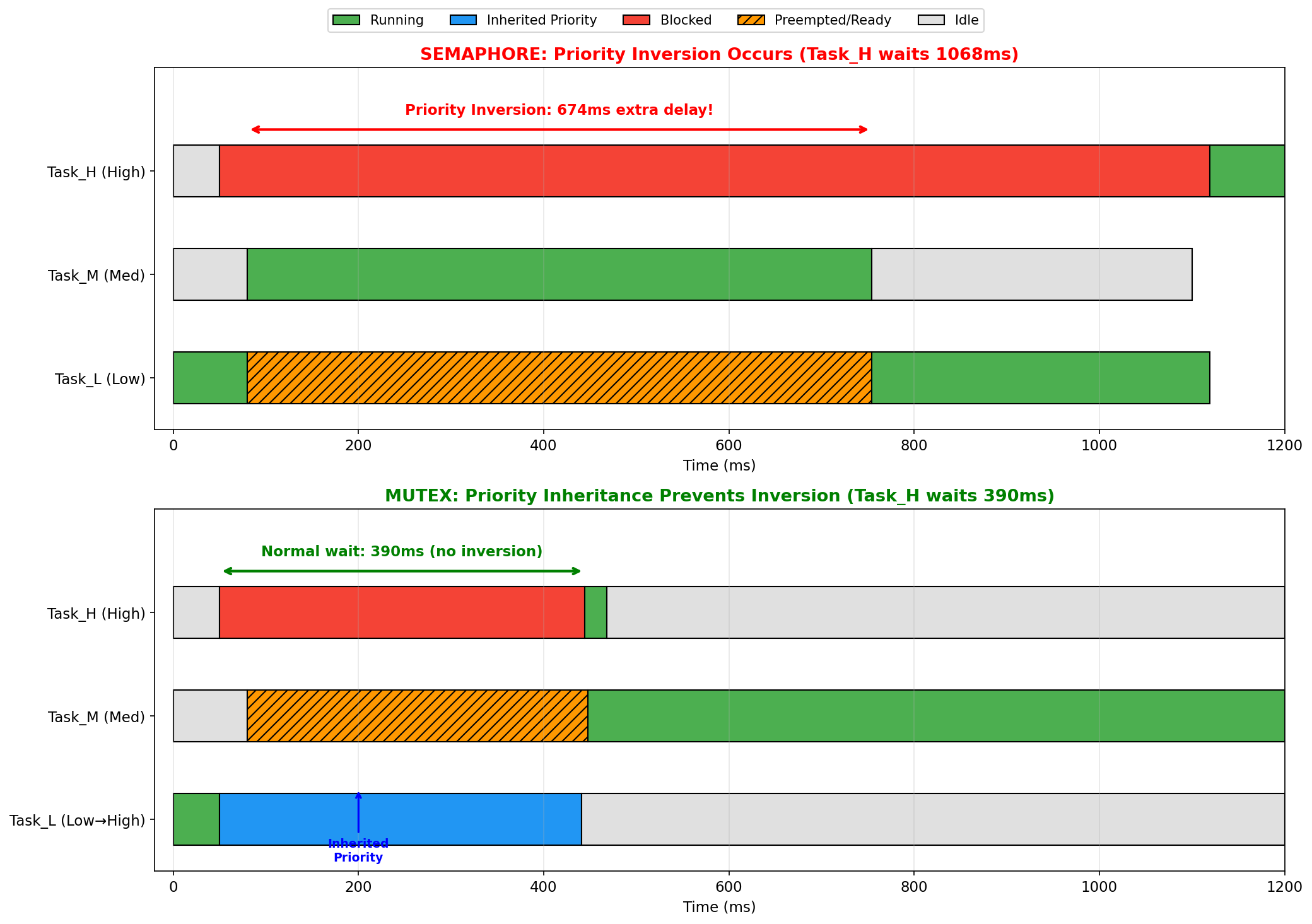
結果對比
| 指標 | 信號量 (無繼承) | 互斥鎖 (有繼承) |
|---|---|---|
| Task_H 等待時間 | 1068 ms | 390 ms |
| Task_M 開始時間 | 80 ms | 448 ms |
| 優先級翻轉 | ✅ 發生 | ❌ 未發生 |
| 額外延遲 | ~828 ms | 0 |
關鍵差異:
- 信號量:Task_M 在 80ms 就搶佔了 Task_L,導致 Task_H 多等了 ~800ms
- 互斥鎖:Task_L 優先級被提升,Task_M 無法搶佔,在 448ms(Task_H 完成後)才開始運行
五、時序對比圖
六、開發中如何避免優先級翻轉
原則 1:使用 Mutex 而非 Semaphore 保護共享資源
/* ❌ 錯誤:信號量沒有優先級繼承 */
rt_sem_t lock = rt_sem_create("lock", 1, RT_IPC_FLAG_PRIO);
/* ✅ 正確:互斥鎖支持優先級繼承 */
rt_mutex_t lock = rt_mutex_create("lock", RT_IPC_FLAG_PRIO);
原則 2:最小化臨界區
/* ❌ 錯誤:臨界區太長 */
rt_mutex_take(mutex, RT_WAITING_FOREVER);
prepare_data(); /* 不需要保護 */
access_shared_resource(); /* 需要保護 */
post_process(); /* 不需要保護 */
rt_mutex_release(mutex);
/* ✅ 正確:只保護必要的部分 */
prepare_data();
rt_mutex_take(mutex, RT_WAITING_FOREVER);
access_shared_resource();
rt_mutex_release(mutex);
post_process();
原則 3:添加超時機制
rt_err_t result = rt_mutex_take(mutex, rt_tick_from_millisecond(100));
if (result == -RT_ETIMEOUT) {
/* 超時處理:記錄日誌、告警、降級處理 */
LOG_W("Mutex timeout - possible priority inversion!");
}
原則 4:避免嵌套鎖
/* ❌ 危險:嵌套鎖可能導致複雜的優先級繼承鏈 */
rt_mutex_take(mutex_A, RT_WAITING_FOREVER);
rt_mutex_take(mutex_B, RT_WAITING_FOREVER); /* 嵌套 */
...
/* ✅ 更好:重新設計,合併資源或使用單一鎖 */
rt_mutex_take(mutex_combined, RT_WAITING_FOREVER);
...
原則 5:高優先級任務儘量避免使用共享資源,為緊急任務分配獨立資源
七、總結
| 問題 | 根因 | 解決方案 |
|---|---|---|
| 優先級翻轉 | 低優先級持鎖時被中優先級搶佔 | 使用 rt_mutex(自動優先級繼承) |
| 無界延遲 | 多箇中優先級任務輪流搶佔 | 最小化臨界區 + 超時機制 |
| 設計缺陷 | 優先級差距大的任務共享資源 | 重新規劃優先級或資源隔離 |
核心要點:
- ✅ 保護共享資源時,永遠使用
rt_mutex_t - ✅ 臨界區儘可能短
- ✅ 高優先級任務儘量避免使用共享資源
- ✅ 添加超時機制作為安全網
- ❌ 不要用
rt_sem_t當鎖使用
附錄:完整 Demo 代碼
git clone https://github.com/SXSBJS-XYT/RT-Thread.git
cd .\Kernel\5.PriorityInversion\PriorityInversion\
作者:[SXSBJS-XYT]