

在大模型可以從互聯網、圖像庫和海量文本中「無限生長」的今天,機器人卻被困在另一個世界——真實世界的數據極度稀缺、昂貴且不可複用。 Business Insider 曾發佈過一則看似輕巧卻又極具洞察力的報道,「AI 機器人面臨數據荒,一家初創公司找到了出人意料的解決方案」。
報道指出,相比語言和視覺模型幾乎取之不盡的訓練語料,機器人與現實世界交互所需的數據在規模、結構化程度和可遷移性上都遠遠不足,這成為機器人規模化智能的關鍵瓶頸,對此一家名為 FieldAI 的初創機器人公司給出了自己的答案。
針對機器人在物理世界中數據規模不足、結構化程度有限的現實約束,FieldAI 選擇了一條不同於主流感知優先路線的解決方式,從底層構建以物理約束為核心的通用機器人智能體系,以提升機器人在真實環境中的泛化與自主能力。
公司官網: https://www.fieldai.com
FieldAI 的宣言:不是隻造機器人,而是造通用機器人大腦
在絕大多數機器人公司致力於打造硬件和展示高難度動作的時代,FieldAI 選擇了一條看起來更加長期主義的路線,它不以製造具體的單一機器人為最終目標,而是致力於打造能夠跨不同類型機器人和適配各種環境的「通用機器人智能大腦」。
這個通用大腦被稱為 Field Foundation Models(FFMs),它不是某一種硬件或者單一功能的軟件,而是專為具身智能構建的新型「以物理為先」的基礎模型。
通俗來講,以物理為先與「先感知、後控制」的傳統 AI 路線有本質區別,FFMs 從設計之初就把真實世界的物理約束、不確定性和風險作為模型的首要任務,而不是在模型輸出後再用規則或控制器去兜底,這使得機器人在面對陌生環境時比如:沒有地圖、 GPS 或者預定路線時,能夠在現場做出決策具備更安全可靠的智能行為。
FieldAI 自身也強調,機器人智能不僅是執行行為本身,更重要的是形成現實世界數據的閉環,在執行任務時產生的感知數據會不斷反饋到模型,用於訓練、優化和迭代,從而讓智能持續進化。
創始人 Agha 在闡述公司願景時説道,「我們的客户無需精確的地圖、甚至無需進行任何訓練,只需按下一個按鈕,機器人就能探索環境的每一個角落」。

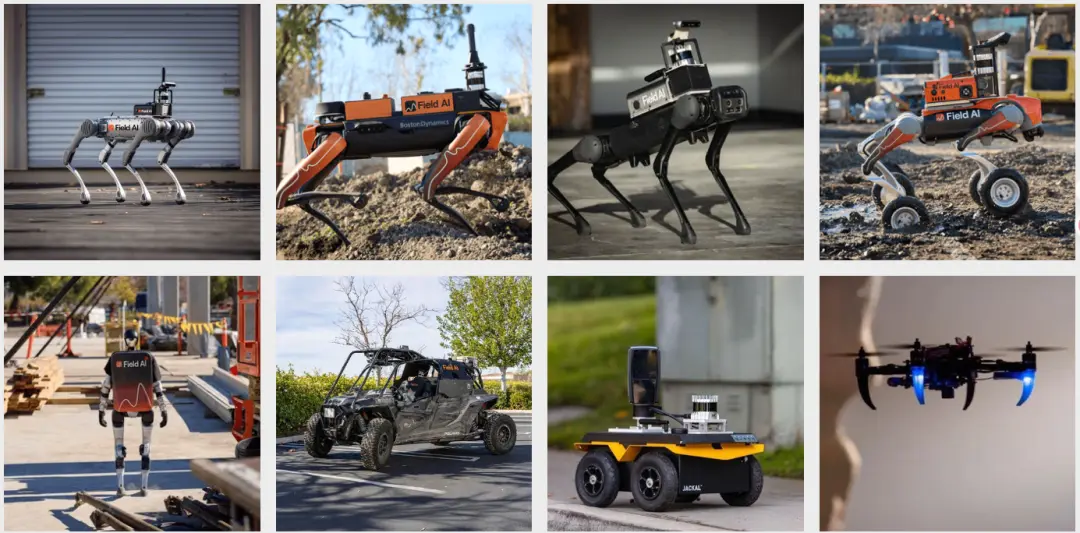
在 FieldAI 的產品落地中,機器人正在承擔現實世界中的剛需任務,他們將目光聚焦於建築、物流、能源、採礦、電力、農業等傳統工作場景,實現規模化的工業級自主運作。
2025 年 11 月,FieldAI 與 DPR Construction 的合作案例就展示了在真實建築工地創造的價值。裝備 FieldAI 大腦的機器人可以自主巡視工地,自動採集數萬張照片、掃描建築內部、繪製大範圍地圖,並將這些數據轉化為可用於進度跟蹤、風險檢測和質量分析的實時信息,這不僅節省了大量人工巡檢時間,也提高了現場安全與效率。
NASA 工程師的「現實主義」革命
FieldAI 獨特的技術路線,在某種程度上可以説是深深植根於其創始人的工程背景之中。
公司創始人兼 CEO Ali Agha 的職業履歷中清晰的記錄着,在 NASA 噴氣推進實驗室(JPL)的 7 年工作時光。他曾參 NASA 自主火星洞穴探索以及原型火星直升機-漫遊車協同自主項目、 DARPA RACER(越野自動駕駛汽車)等相關研究,細數這些項目便不難發現一個共通點:環境不可預測以及出錯代價極高,幾乎不存在人為干預的可能性。
從學術背景來看,Ali Agha 也並不只是「做過 NASA 項目」的超級研究員,他還是長期親自參與機器人核心智能問題與自主算法研究的學者。根據公開的學術成果可以總結出,他在多個機器人頂級會議和期刊中都圍繞了一個主題進行過深入探討——機器人如何在缺乏完整信息的情況下,自主理解環境並持續做出可靠決策。
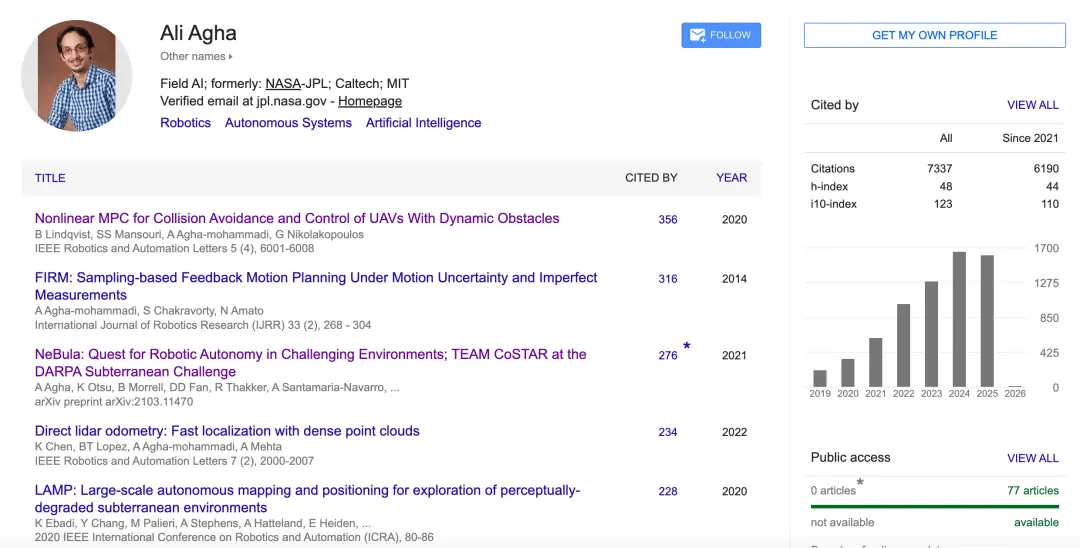
例如,Agha 與團隊成員在 Journal of Field Robotics 上發表了題為「NeBula: Team CoSTAR’s robotic autonomy solution that won phase II of DARPA Subterranean Challenge」的論文,系統介紹了用於複雜、未知環境下機器人的自主決策框架 NeBula,該框架能夠在面對不完整感知和任務不確定性時,結合多模態信息進行風險感知、環境映射與路徑規劃。

此外,他還參與了多篇發表在 IEEE Robotics and Automation Letters 等會議和期刊的研究工作。例如,在論文「Nonlinear MPC for Collision Avoidance and Control of UAVs With Dynamic Obstacles」中,探討了無人系統在動態環境中進行安全控制與避障的問題;另一篇名為「LAMP 2.0: A Robust Multi-Robot SLAM System for Operation in Challenging Large-Scale Underground Environments」的論文也展示了在大尺度、感知退化環境中,進行穩定地圖構建的具體技術細節。

或許正是在這樣的工作與學術背景下,塑造了 Agha 對機器人智能更偏向「底層」的理解。以此為基石,FieldAI 匯聚了來自 DeepMind 、特斯拉、 SpaceX 、 NASA 以及亞馬遜等頂級公司的技術精英,共同實現是讓機器人能在現實世界中長時間穩定工作,並在不斷變化的環境中能做出安全、合理決策的美好願景。

通用機器人 OS 的爭奪戰
FieldAI 在 2023 年正式成立,但其在資本市場上的進展速度,遠遠快於一家初創公司的常規節奏。截止 2025 年 8 月,公司在不到兩年時間內完成了超過 4.05 億美元融資,投後估值約 20 億美元,並且投資陣容十分豪華包括:貝佐斯的私人投資辦公室、英特爾資本、英偉達風投部門、比爾蓋茨的投資基金、三星等。這反映的不僅是數字規模問題,更是其背後所代表的資本判斷。
對這些投資方而言,押注 FieldAI 並不只是在選擇某一款具體機器人產品,而是在押注一個更底層、更具通用性的智能發展方向。

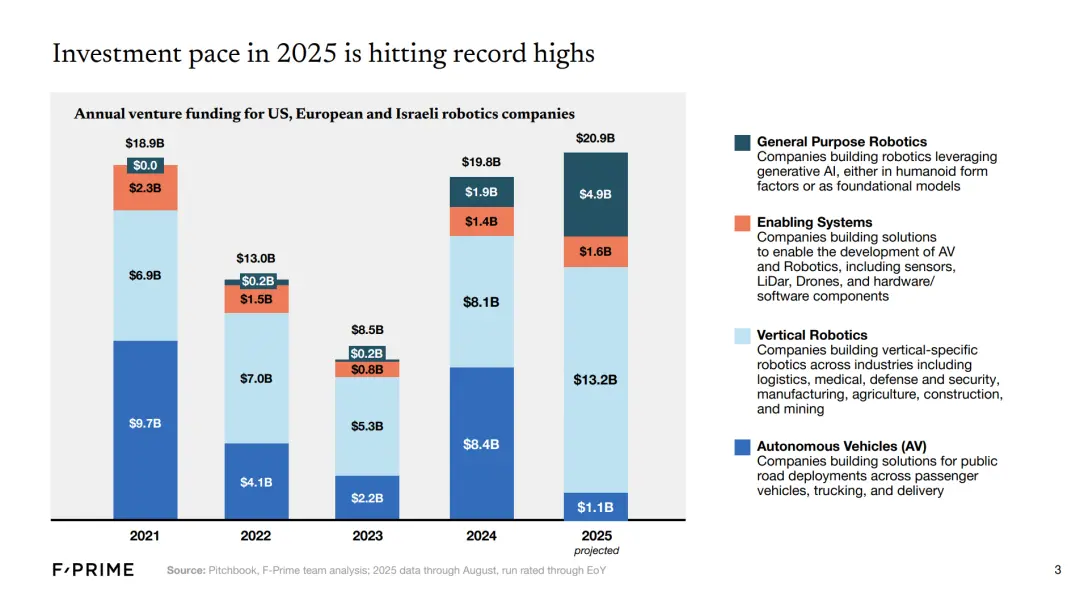
路透社曾在報道中援引 F-Prime Capital 的報告指出「2024 年全球機器人領域的投資額將飆升至 186 億美元,比上一年增長 116%」,根據 F-Prime 在 2025 年下半年發佈的最新動態數據進一步顯示,這一增長勢頭並未放緩,全球機器人投資額預計在 2025 年有望突破 209 億美元大關,刷新歷史最高紀錄。
除此之外通用與垂直迎來了雙重爆發,通用機器人(General Purpose)的投資額預計從 19 億美元飆升至 49 億美元;針對特定場景的垂直機器人(Vertical Robotics)則佔據了半壁江山,規模從 81 億美元躍升至 132 億美元。
在這樣的背景下,FieldAI 所處的位置並沒有在「通用」與「垂直」之間做單選題。一方面,它正全力投入的 通用機器人智能大腦,對應了迅速最快的通用機器人板塊。正如 2025 年的投資者不再滿足於買「一台會幹活的機器」,而是在搶奪一張能讓所有機器都學會幹活的「入場券」。另一方面,FieldAI 着力產品在垂直場景的應用,通過解決建築工地、檢查、城市配送、能源等實實在在產生商業現金流的問題。也許正因如此,它才能同時獲得芯片巨頭、科技創始人及長期資本的共同押注。

具身智能行業的這些年
如果説過去十年機器人行業的主旋律是看創新,那麼接下來十年真正決定行業格局的將是規模化部署。 FieldAI 的路徑恰好切中這個結構性轉折點,它不押注某一種機器人外形或單一場景,而是押注一套可擴張、可複用、可持續升級的「通用機器人大腦 + 數據基礎設施」。
在具身智能領域蓬勃發展的今天,共同期待着未來的機器人生態像當下的智能手機那個一樣百花齊放,真正服務於人類便利於生活。
參考鏈接:
1.https://www.businessinsider.com/ai-robotics-data-problem-fieldai-surprising-fix-ali-agha-2025-9
2.https://robobdtw2025.mapyourshow.com/8\_0/sessions/session-details.cfm?scheduleid=100&
3.https://spectrum.ieee.org/autonomy-unstructured-field-ai
4.https://www.reuters.com/business/robotics-startup-fieldai-raises-314-million-new-funding-sources-say-2025-08-20/
5.https://fprimecapital.com/blog/robotics-on-the-rise-the-state-of-robotics-investment-in-2025/