
串口協議解析實戰:以 R60ABD1 雷達為例,詳解 MicroPython 驅動中數據與業務邏輯的分離設計
摘要:
本文以 R60ABD1 雷達為實戰案例,詳解 MicroPython 環境下自定義串口通信協議架構的設計與分析方法,聚焦數據解析與業務邏輯分離核心,拆解協議封裝、指令交互等關鍵環節,提供可複用的嵌入式串口驅動開發思路。
原文鏈接:
FreakStudio的博客
正文
一、R60ABD1 數據手冊核心信息解析
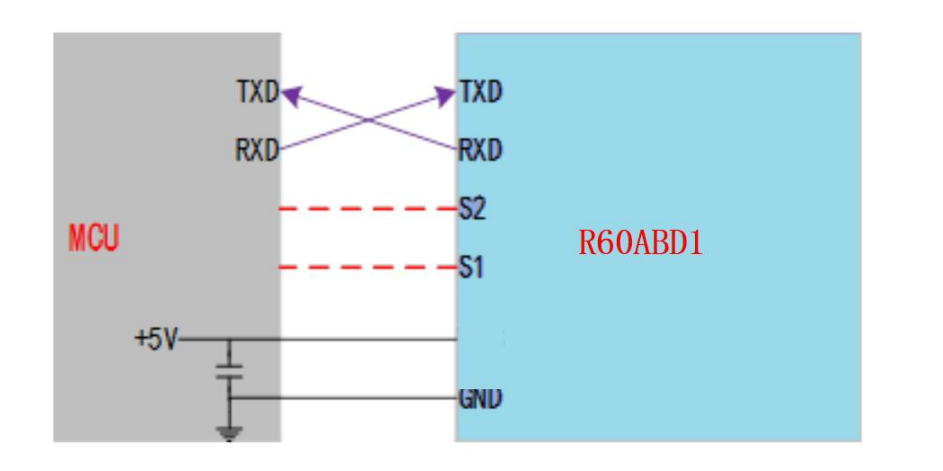
這裏,首先我們需要閲讀手冊相關,可以看到其提供了 UART 接口,並且採用了自定義串口協議:
基於該協議,我們可從協議解析層和業務邏輯層進行分層設計,以實現模塊化、易維護的 MicroPython 驅動:
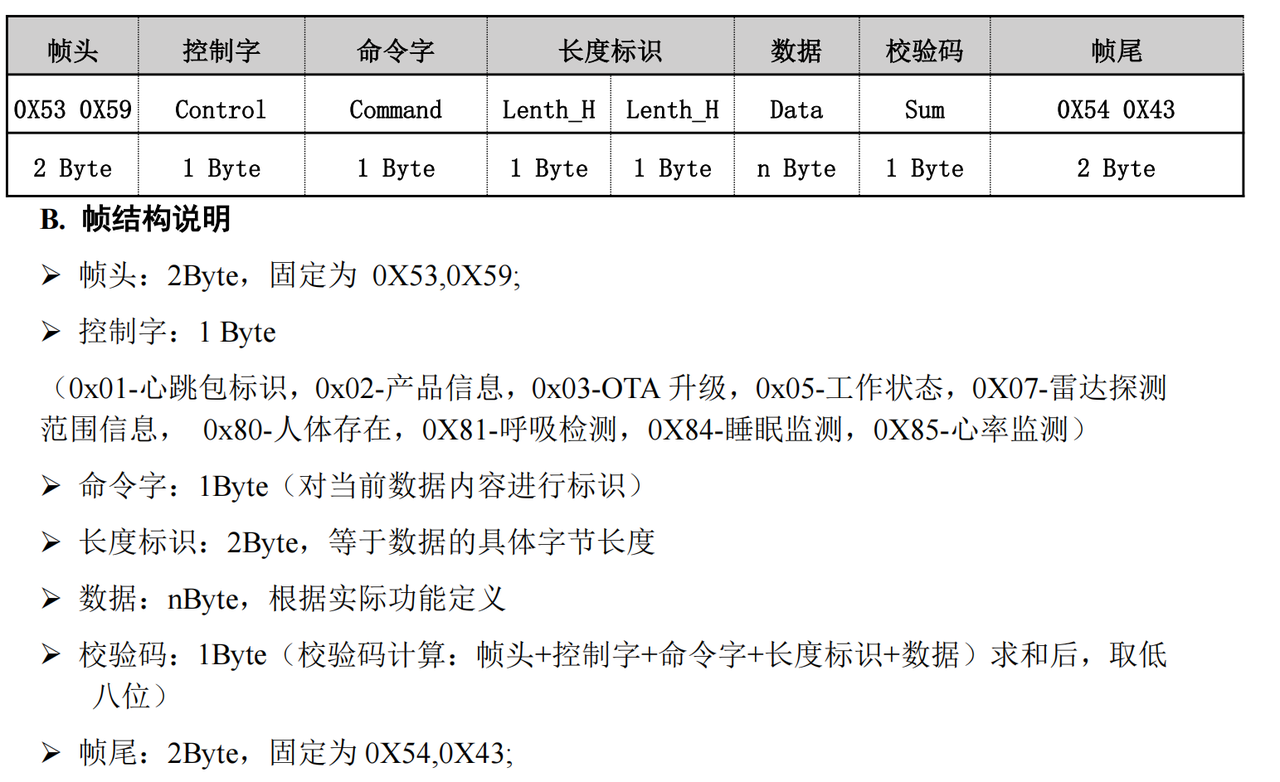
- 在協議解析層,首先需實現幀提取邏輯:通過循環讀取串口數據,匹配固定幀頭
0X53 0X59來定位一幀的起始;再根據 “長度標識” 字段(2 字節,由Lenth_H和Lenth_L組成,代表數據段的字節長度)確定後續需讀取的字節數;最後校驗幀尾0X54 0X43,確保整幀數據的完整性,避免斷幀、粘幀問題。 - 在業務邏輯層,則封裝設備的控制指令(如發送 “配置呼吸監測模式”“查詢設備狀態” 的指令)和數據應用接口(如實時獲取呼吸率、判斷人體存在狀態、解析睡眠監測結果),使上層業務代碼無需關注底層協議的細節,只需調用封裝好的方法即可完成設備交互與數據應用。
相關協議可看:
接下來,我們將基於這個分層架構,手把手教大家如何實現 MicroPython 驅動中數據與業務邏輯的分離設計。
二、硬件連接與調試環境搭建(必要前置環節)
在面對任何基於自定義串口協議的設備(如 R60ABD1 呼吸睡眠監測雷達)時,啓動二次開發前,有兩個 “前置驗證環節” 必須優先落地 —— 這不是可有可無的步驟,而是避免後期陷入 “代碼邏輯正確卻始終跑不通” 的關鍵:
-
用串口助手逐指令實測: 設備手冊對串口協議的描述(如指令格式、響應規則、數據幀結構)本質是 “理論約定”,但實際開發中,受固件版本迭代、生產批次差異甚至文檔筆誤影響,“手冊描述” 與 “設備實際行為” 可能存在偏差。串口助手的核心價值,就是用最直接的 “發送 - 接收” 交互,驗證協議細節的真實性。具體操作需圍繞三個維度展開:
- 指令完整性驗證:按手冊定義的格式(幀頭、控制字、命令字、參數、校驗碼、幀尾)手工組裝每一條指令(如 R60ABD1 的 “開啓呼吸監測” 指令
0x53 0x59 0x01 0x01 0x00 0x00 [校驗碼] 0x54 0x43),通過串口助手發送後,重點觀察返回幀是否符合預期 —— 幀頭是否正確(如0x53 0x59)、幀尾是否匹配(如手冊寫0x54 0x43,實測可能為0x54 0x44)、長度字段是否與數據段字節數一致(避免因長度計算錯誤導致後續解析丟幀)。 - 響應邏輯驗證:測試 “指令 - 響應” 的因果關係是否閉環。例如發送 “配置採樣率為 10Hz” 的指令後,觀察設備輸出數據的頻率是否真的變為 10Hz;發送 “查詢設備版本號” 指令後,返回數據段的字節是否能解析出合理的版本信息(如
V1.2.3對應的 ASCII 碼)。若出現 “發送指令無響應” 或 “響應與指令無關”,需優先排查接線(TX/RX 是否反接)、波特率(是否與設備默認值一致,如 R60ABD1 可能為 115200)、校驗方式(是否漏算校驗碼或計算規則錯誤)。 - 校驗機制有效性驗證:故意破壞指令的完整性(如修改某一字節的值、篡改校驗碼),發送後觀察設備是否拒絕響應或返回錯誤幀 —— 這能驗證設備的校驗邏輯是否生效。例如 R60ABD1 的校驗規則為 “幀頭到數據段所有字節累加和的低 8 位”,若修改數據段某字節後設備仍正常響應,説明校驗機制可能未啓用或手冊描述有誤,需以實測結果調整解析邏輯。
- 指令完整性驗證:按手冊定義的格式(幀頭、控制字、命令字、參數、校驗碼、幀尾)手工組裝每一條指令(如 R60ABD1 的 “開啓呼吸監測” 指令
-
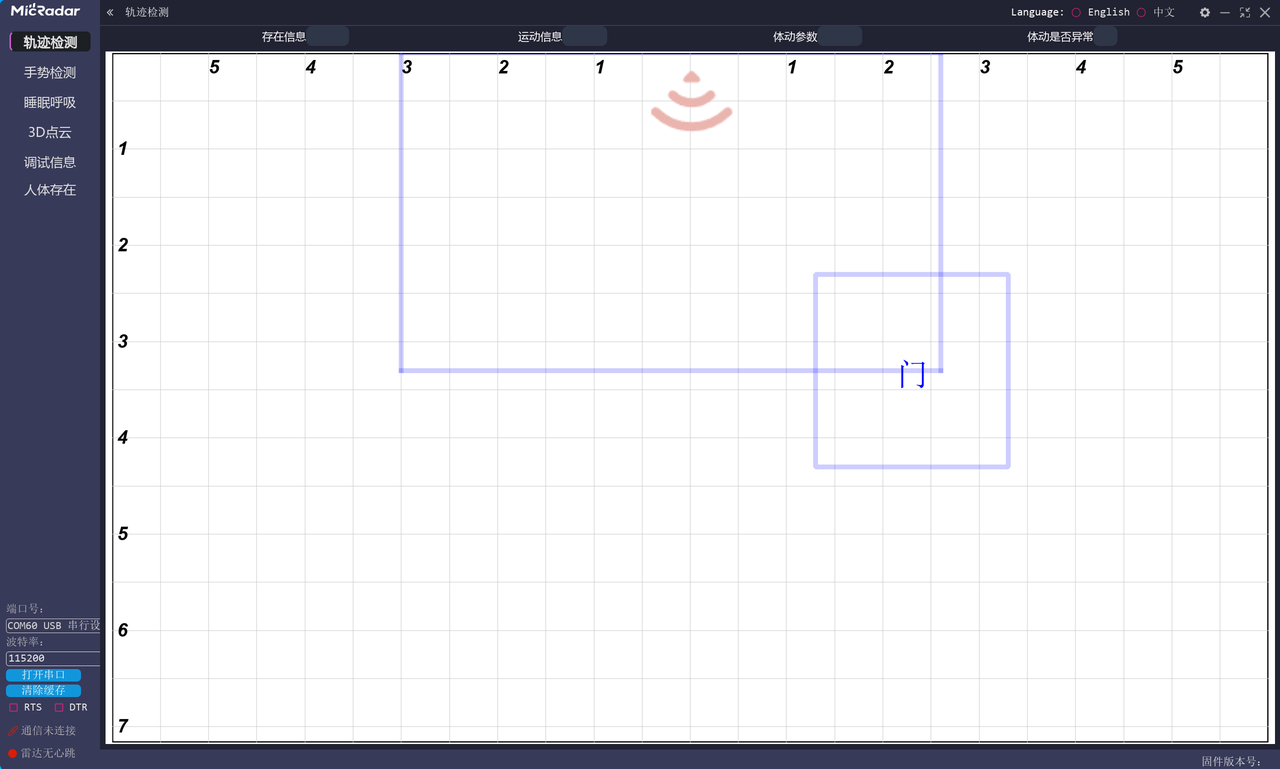
挖掘官方上位機工具: 設備廠商提供的上位機工具是經過官方驗證的 “標準交互模板”,其價值遠不止於 “可視化顯示數據”,更能為驅動開發提供 “錨點式參考”。具體可從三個層面利用上位機工具:
- 設備基礎狀態確認:通過上位機能否正常連接設備、顯示實時數據(如 R60ABD1 的呼吸頻率、心率曲線),可快速排除硬件層面的問題 —— 若上位機能正常工作,説明供電(電壓是否穩定在 3.3V)、串口接線(電平是否匹配,避免 3.3V 設備接 5V 燒壞)、設備本身(是否故障)均無問題,後續開發可聚焦於軟件邏輯;反之,若上位機也無法通信,則需優先排查硬件連接。
- 原始數據日誌對照:部分上位機支持 “串口數據日誌” 功能(可記錄設備收發的每一字節原始數據)。例如啓動 R60ABD1 的睡眠監測模式後,上位機日誌中會記錄設備輸出的完整數據幀序列,將這些原始幀與自己用串口助手收到的幀對比:若一致,説明數據接收鏈路正常,解析錯誤大概率是邏輯問題;若不一致,需檢查串口參數(如停止位是否為 1 位)或緩存機制(是否因接收速度慢導致數據丟失)。
- 協議細節反向推導:當手冊對某字段描述模糊,可通過上位機的可視化結果反向映射這種 “現象 → 數據” 的推導,比單純依賴手冊更高效、準確。
這裏,在下面的網址中,我們可以找到其上位機:
https://www.micradar.cn/technology-21-208-1.html
2.1 R60ABD1 指令實測總結
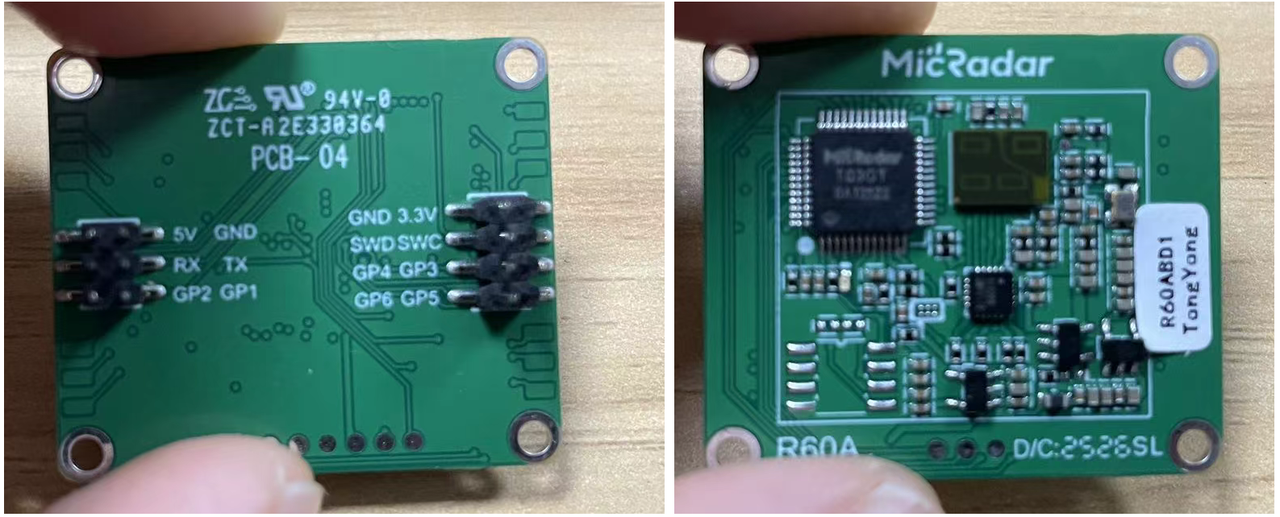
在將模塊和 USB 轉 TTL 模塊連接後,實測相關指令及其響應如下所示:
2.1.1 基礎指令信息查詢和設置
-
心跳包查詢: 53 59 01 80 00 01 0F 3D 54 43
- 回覆樣例: 53 59 01 80 00 01 0F 3D 54 43
-
模組復位: 53 59 01 02 00 01 0F BF 54 43
- 回覆樣例:
53 59 01 02 00 01 0F BF 54 43 # 模組首先原樣返回下發的復位指令,作為指令接收確認
53 59 05 01 00 01 0F C2 54 43 # 初始化完成上報
53 59 85 00 00 01 00 32 54 43 # 心率監測功能狀態上報。數據 00 表示該功能默認關閉。
53 59 81 00 00 01 00 2E 54 43 # 呼吸監測功能狀態上報。數據 00 表示該功能默認關閉。
53 59 84 00 00 01 01 32 54 43 # 睡眠監測功能狀態上報。數據 01 表示該功能默認開啓。
53 59 84 13 00 01 00 44 54 43 # 人體存在功能狀態上報。數據 00 表示該功能默認關閉。
53 59 84 14 00 01 01 46 54 43 # 無人計時功能開關打開
53 59 80 00 00 01 00 2D 54 43 # 人體存在功能打開
53 59 84 0F 00 01 01 41 54 43 # 未知指令
53 59 02 02 00 08 30 2E 30 2E 31 00 00 00 A5 54 43 # 產品 ID 上報,數據 30 2E 30 2E 31 00 轉換為 ASCII 是 0.0.1
53 59 02 04 00 10 47 36 30 53 4D 31 53 59 76 30 31 30 33 30 39 00 8F 54 43 # 固件版本上報,數據轉換為 ASCII 是 G60SM1SYv010309
53 59 02 03 00 05 52 36 30 41 00 AF 54 43 # 硬件版本上報。數據 52 36 30 41 00 轉換為 ASCII 是 R60A。
53 59 84 15 00 01 1E 64 54 43 # 無人計時時長設置為 0x1E (30 分鐘)
53 59 84 01 00 01 00 32 54 43 # 入牀/離牀狀態為 00 (離牀)
53 59 84 02 00 01 03 36 54 43 # 睡眠狀態為 03 (無睡眠狀態)
53 59 84 03 00 02 00 00 35 54 43 # 清醒時長為 0000 (0 分鐘)
53 59 84 04 00 02 00 00 36 54 43 # 淺睡時長為 0000 (0 分鐘)
53 59 84 05 00 02 00 00 37 54 43 # 深睡時長為 0000 (0 分鐘)
53 59 84 06 00 01 00 37 54 43 # 睡眠質量評分為 00 (0 分)
53 59 84 0C 00 08 00 03 00 00 00 00 00 00 47 54 43 # 睡眠綜合狀態數據全 0
53 59 84 0D 00 0C 00 00 00 00 00 00 00 00 00 00 00 00 49 54 43 # 睡眠統計數據全 0
53 59 84 0E 00 01 03 42 54 43 # 睡眠異常狀態為 0x03 (無)
53 59 84 10 00 01 00 41 54 43 # 睡眠質量評級為 0x00 (無)
53 59 84 16 00 01 0A 51 54 43 # 睡眠截止時長設置為 0x0A 分鐘(即 10 分鐘)
53 59 84 12 00 01 01 44 54 43 # 無人計時狀態為 0x01 (正常)
-
產品型號查詢: 53 59 02 A1 00 01 0F 5F 54 43
- 回覆樣例:
53 59 02 A1 00 08 52 36 30 41 53 4D 31 00 21 54 43R60ASM1(16進製為52 36 30 41 53 4D 31 00)b'R60ASM1\x00'
- 回覆樣例:
-
產品ID查詢: 53 59 02 A2 00 01 0F 60 54 43
- 回覆樣例: 53 59 02 A2 00 08 30 2E 30 2E 31 00 00 00 45 54 43
b'0.0.1\x00\x00\x00'
-
硬件型號查詢: 53 59 02 A3 00 01 0F 61 54 43
- 回覆樣例:
53 59 02 A3 00 05 52 36 30 41 00 4F 54 43R60A(16進製為52 36 30 41 00)b'R60A\x00'
- 回覆樣例:
-
固件版本查詢: 53 59 02 A4 00 01 0F 62 54 43
- 回覆樣例:
53 59 02 A4 00 10 47 36 30 53 4D 31 53 59 76 30 31 30 31 30 37 00 2B 54 43G60SM1SYv010107(16進製為47 36 30 53 4D 31 53 59 76 30 31 30 31 30 37 00)b'G60SM1SYv010309\x00'
- 回覆樣例:
-
初始化是否完成查詢: 53 59 05 81 00 01 0F 42 54 43
- 回覆樣例: 53 59 05 81 00 01 01 34 54 43
-
雷達探測範圍信息位置越界狀態查詢: 53 59 07 87 00 01 0F 4A 54 43
- 回覆樣例: 53 59 07 87 00 01 00 3B 54 43
2.1.2 人體存在指令信息查詢和設置
-
開關人體存在功能
- 打開人體存在功能: 53 59 80 00 00 01 01 2E 54 43
- 回覆樣例:53 59 80 00 00 01 01 2E 54 43
- 關閉人體存在功能: 53 59 80 00 00 01 00 2D 54 43
- 回覆樣例:53 59 80 00 00 01 00 2D 54 43
- 打開人體存在功能: 53 59 80 00 00 01 01 2E 54 43
-
查詢人體存在開關: 53 59 80 80 00 01 0F BC 54 43
- 回覆樣例:53 59 80 80 00 01 00 AD 54 43
-
存在信息查詢: 53 59 80 81 00 01 0F BD 54 43
- 回覆樣例:53 59 80 81 00 01 01 AF 54 43
-
運動信息查詢: 53 59 80 82 00 01 0F BE 54 43
- 回覆樣例:53 59 80 82 00 01 02 B1 54 43
-
體動參數查詢: 53 59 80 83 00 01 0F BF 54 43
- 回覆樣例:53 59 80 83 00 01 05 B5 54 43
-
人體距離查詢: 53 59 80 84 00 01 0F C0 54 43
- 回覆樣例:53 59 80 84 00 02 00 2F E1 54 43
-
人體方位查詢: 53 59 80 85 00 01 0F C1 54 43
- 回覆樣例:53 59 80 85 00 06 80 0F 00 2C 00 00 72 54 43
2.1.3 心率監測指令信息查詢和設置
-
開關心率監測功能
- 打開心率監測功能: 53 59 85 00 00 01 01 33 54 43
- 回覆樣例:53 59 85 00 00 01 01 33 54 43
- 關閉心率監測功能: 53 59 85 00 00 01 00 32 54 43
- 回覆樣例:53 59 85 00 00 01 00 32 54 43
- 打開心率監測功能: 53 59 85 00 00 01 01 33 54 43
-
查詢心率監測開關: 53 59 85 80 00 01 0F C1 54 43
- 回覆樣例:53 59 85 80 00 01 00 B2 54 43
-
心率波形上報開關設置
- 打開心率波形上報開關: 53 59 85 0A 00 01 01 3D 54 43
- 回覆樣例:53 59 85 0A 00 01 01 3D 54 43
- 關閉心率波形上報開關: 53 59 85 0A 00 01 00 3C 54 43
- 回覆樣例:53 59 85 0A 00 01 00 3C 54 43
- 打開心率波形上報開關: 53 59 85 0A 00 01 01 3D 54 43
-
心率波形上報開關查詢: 53 59 85 8A 00 01 0F CB 54 43
- 回覆樣例:53 59 85 8A 00 01 00 BC 54 43
-
心率數值查詢: 53 59 85 82 00 01 0F C3 54 43
- 回覆樣例:53 59 85 82 00 01 50 04 54 43
-
心率波形查詢: 53 59 85 85 00 01 0F C6 54 43
- 回覆樣例:53 59 85 85 00 05 C1 BE AA 90 8A FE 54 43
2.1.4 呼吸監測指令信息查詢和設置
-
開關呼吸監測功能:
- 打開呼吸監測功能: 53 59 81 00 00 01 01 2F 54 43
- 回覆樣例:53 59 81 00 00 01 01 2F 54 43
- 關閉呼吸監測功能: 53 59 81 00 00 01 00 2E 54 43
- 回覆樣例:53 59 81 00 00 01 00 2E 54 43
- 打開呼吸監測功能: 53 59 81 00 00 01 01 2F 54 43
-
查詢呼吸監測開關: 53 59 81 80 00 01 0F BD 54 43
- 回覆樣例:53 59 81 80 00 01 00 AE 54 43
-
低緩呼吸判讀設置(默認值 0x0A): 數值範圍
10~20(0x0A~0x14),可替換數據字段為其他值,需重新計算校驗和。- 設置為20: 53 59 81 0B 00 01 14 4D 54 43
- 回覆樣例: 53 59 81 8B 00 01 14 CD 54 43
- 設置為10: 53 59 81 0B 00 01 0A 43 54 43
- 回覆樣例: 53 59 81 8B 00 01 0A C3 54 43
- 設置為20: 53 59 81 0B 00 01 14 4D 54 43
-
低緩呼吸判讀查詢: 53 59 81 8B 00 01 0F C8 54 43
- 回覆樣例:53 59 81 8B 00 01 0A C3 54 43
-
呼吸信息查詢: 53 59 81 81 00 01 0F BE 54 43
- 回覆樣例:53 59 81 81 00 01 01 B0 54 43
-
呼吸數值查詢: 53 59 81 82 00 01 0F BF 54 43
- 回覆樣例:53 59 81 82 00 01 16 C6 54 43
-
呼吸波形上報開關設置:
- 打開呼吸波形上報開關: 53 59 81 0C 00 01 01 3B 54 43
- 回覆樣例:53 59 81 0C 00 01 01 3B 54 43
- 關閉呼吸波形上報開關: 53 59 81 0C 00 01 00 3A 54 43
- 回覆樣例:53 59 81 0C 00 01 00 3A 54 43
- 打開呼吸波形上報開關: 53 59 81 0C 00 01 01 3B 54 43
-
呼吸波形上報開關查詢: 53 59 81 8C 00 01 0F C9 54 43
- 回覆樣例:53 59 81 8C 00 01 00 BA 54 43
-
呼吸波形查詢: 53 59 81 85 00 01 0F C2 54 43
- 回覆樣例:53 59 81 85 00 05 C9 60 18 40 9A D2 54 43
2.1.5 睡眠監測指令信息查詢和設置
-
開關睡眠監測功能
- 打開睡眠監測功能: 53 59 84 00 00 01 01 32 54 43
- 回覆樣例:53 59 84 00 00 01 01 32 54 43
- 關閉睡眠監測功能: 53 59 84 00 00 01 00 31 54 43
- 回覆樣例:53 59 84 00 00 01 00 31 54 43
- 打開睡眠監測功能: 53 59 84 00 00 01 01 32 54 43
-
查詢睡眠監測開關: 53 59 84 80 00 01 0F C0 54 43
- 回覆樣例:53 59 84 80 00 01 00 B1 54 43
-
異常掙扎狀態開關設置
- 打開異常掙扎狀態: 53 59 84 13 00 01 01 45 54 43
- 回覆樣例:53 59 84 13 00 01 01 45 54 43
- 關閉異常掙扎狀態: 53 59 84 13 00 01 00 44 54 43
- 回覆樣例:53 59 84 13 00 01 00 44 54 43
- 打開異常掙扎狀態: 53 59 84 13 00 01 01 45 54 43
-
異常掙扎狀態開關查詢: 53 59 84 93 00 01 0F D3 54 43
- 回覆樣例:53 59 84 93 00 01 00 C4 54 43
-
異常掙扎狀態查詢: 53 59 84 91 00 01 0F D1 54 43
- 回覆樣例:53 59 84 91 00 01 00 C2 54 43(0x00 無 0x01 正常狀態 0x02 異常掙扎狀態)
-
掙扎狀態判讀設置(靈敏度中 = 0x01):
0x00=低,0x01=中,0x02=高- 設置為0x01: 53 59 84 1A 00 01 01 4C 54 43
- 回覆樣例: 53 59 84 1A 00 01 01 4C 54 43
- 設置為0x01: 53 59 84 1A 00 01 01 4C 54 43
-
掙扎狀態判讀查詢: 53 59 84 9A 00 01 0F DA 54 43
- 回覆樣例:53 59 84 9A 00 01 01 CC 54 43
-
無人計時功能開關設置
- 打開無人計時功能開關: 53 59 84 14 00 01 01 46 54 43
- 回覆樣例:
- 53 59 84 15 00 01 1E 64 54 43
- 53 59 84 14 00 01 01 46 54 43
- 回覆樣例:
- 關閉無人計時功能開關: 53 59 84 14 00 01 00 45 54 43
- 回覆樣例:53 59 84 14 00 01 00 45 54 43
- 打開無人計時功能開關: 53 59 84 14 00 01 01 46 54 43
-
無人計時功能開關查詢: 53 59 84 94 00 01 0F D4 54 43
- 回覆樣例:53 59 84 94 00 01 00 C5 54 43
-
無人計時時長設置(默認值 30分鐘 = 0x1E) :數值範圍 30-180分鐘(
0x1E~0xB4),步長10分鐘- 設置為30: 53 59 84 15 00 01 1E 64 54 43
- 回覆樣例: 53 59 84 15 00 01 1E 64 54 43
- 設置為30: 53 59 84 15 00 01 1E 64 54 43
-
無人計時時長查詢: 53 59 84 95 00 01 0F D5 54 43
- 回覆樣例: 53 59 84 95 00 01 1E E4 54 43
-
無人計時狀態查詢: 53 59 84 92 00 01 0F D2 54 43
- 回覆樣例: 53 59 84 92 00 01 01 C4 54 43
-
睡眠截止時長設置(默認值 5分鐘 = 0x05): 數值範圍 5-120分鐘(
0x05~0x78)- 設置為5: 53 59 84 16 00 01 05 4C 54 43
- 回覆樣例: 53 59 84 16 00 01 05 4C 54 43
- 設置為10: 53 59 84 16 00 01 0A 51 54 43
- 回覆樣例: 53 59 84 16 00 01 0A 51 54 43
- 設置為5: 53 59 84 16 00 01 05 4C 54 43
-
睡眠截止時間查詢: 53 59 84 96 00 01 0F D6 54 43
- 回覆樣例:
- 53 59 84 96 00 01 0A D1 54 43
- 53 59 84 9A 00 01 01 CC 54 43
- 回覆樣例:
-
入牀/離牀狀態查詢: 53 59 84 81 00 01 0F C1 54 43
- 回覆樣例:53 59 84 81 00 01 01 B3 54 43
-
睡眠狀態查詢: 53 59 84 82 00 01 0F C2 54 43
- 回覆樣例:53 59 84 82 00 01 02 B5 54 43
-
清醒時長查詢: 53 59 84 83 00 01 0F C3 54 43
- 回覆樣例:53 59 84 83 00 02 00 32 E7 54 43
-
淺睡時長查詢: 53 59 84 84 00 01 0F C4 54 43
- 回覆樣例:53 59 84 84 00 02 00 00 B6 54 43
-
深睡時長查詢: 53 59 84 85 00 01 0F C5 54 43
- 回覆樣例:53 59 84 85 00 02 00 00 B7 54 43
-
睡眠質量評分查詢: 53 59 84 86 00 01 0F C6 54 43
- 回覆樣例:53 59 84 86 00 01 00 B7 54 43
-
睡眠綜合狀態查詢: 53 59 84 8D 00 01 0F CD 54 43
- 回覆樣例:53 59 84 8D 00 08 01 02 12 4B 00 26 3E 00 89 54 43
-
睡眠異常查詢: 53 59 84 8E 00 01 0F CE 54 43
- 回覆樣例:53 59 84 8E 00 01 03 C2 54 43
-
睡眠統計查詢: 53 59 84 8F 00 01 0F CF 54 43
- 回覆樣例:53 59 84 8F 00 0C 00 00 00 00 00 00 00 00 00 00 00 00 CB 54 43
-
睡眠質量評級查詢: 53 59 84 90 00 01 0F D0 54 43
- 回覆樣例:53 59 84 90 00 01 00 C1 54 43
2.2 R60ABD1相關問題總結
在實際測試過程中,我們實際上發現了以下問題,在後續驅動代碼編寫中需要注意,這裏我記錄了問題的情況和具體版本號。
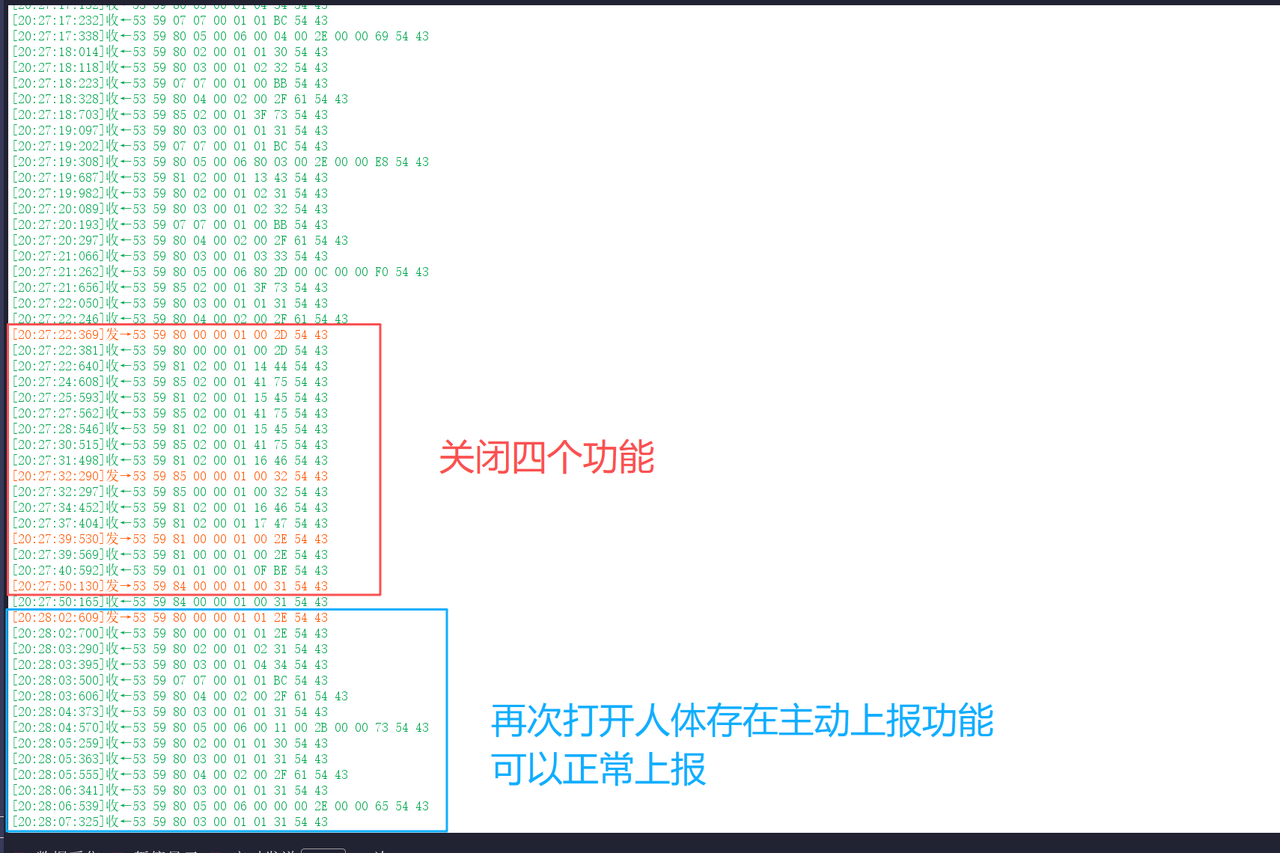
2.2.1 關閉四項主動上報後重啓,單獨開啓任一功能無數據響應
在新版固件(G60SM1SYv010309)上,發現一個異常操作序列:
- 第N次操作:依次關閉人體存在、心率、呼吸、睡眠這四項功能的主動上報後,對毫米波雷達模組執行斷電再上電。
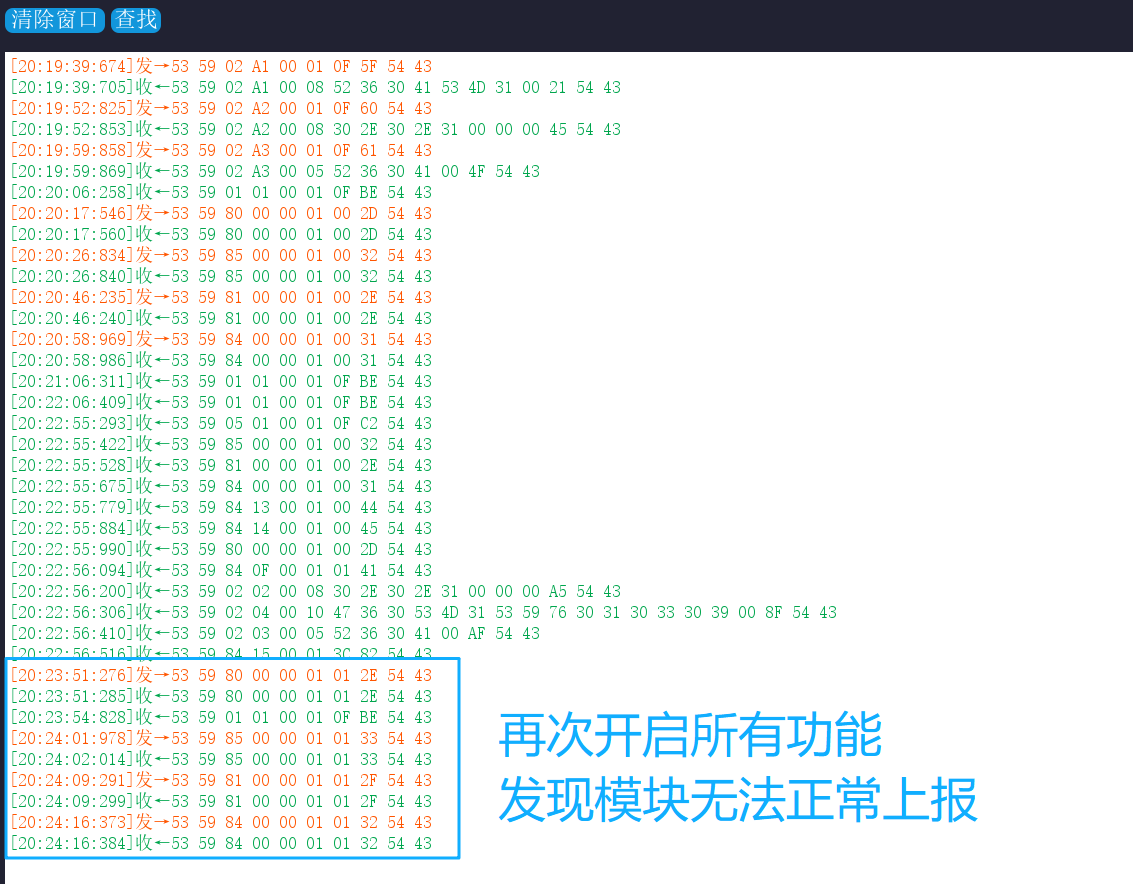
- 第N+1次操作:模組重啓後,此時單獨開啓其中任一功能,均無法收到相應的主動上報數據。
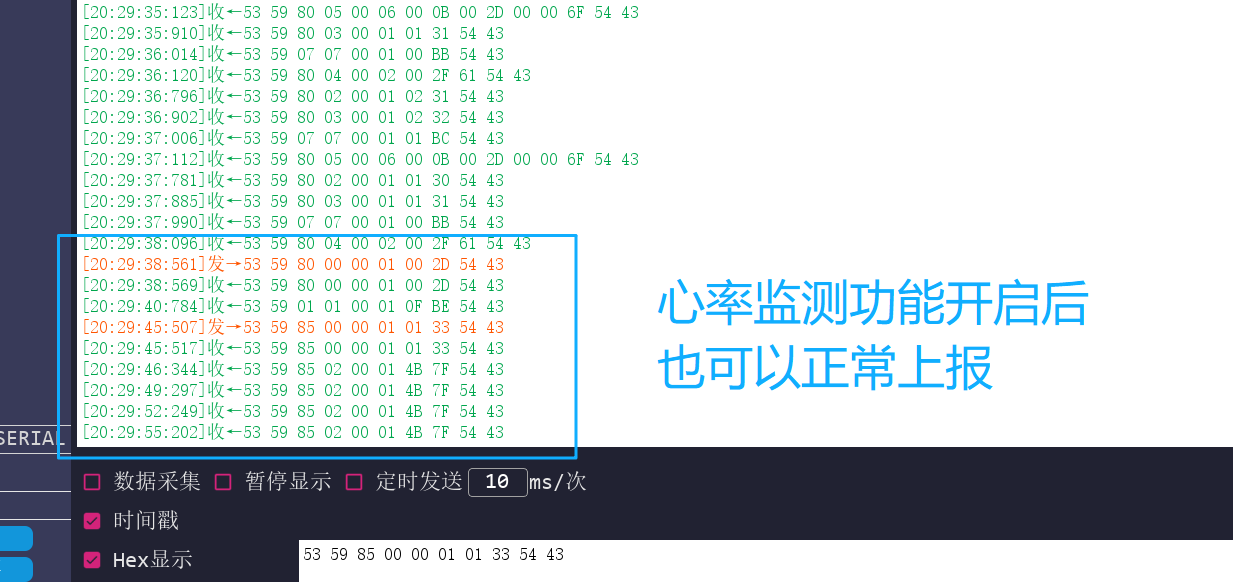
- 第N+2次操作:將四項功能的主動上報全部開啓,並再次對模組執行斷電重啓。此後,所有主動上報功能均恢復正常工作,且在此次上電週期內,任意開啓或關閉單一功能,都能得到預期的響應。
如下為在新版固件(G60SM1SYv010309)上進行測試的過程:
![image]()
![image]()
![image]()
![image]()
![image]()
![image]()
![image]()
![image]()
如下,為在舊版本固件(G60SM1SYv010107)上進行的相同測試:
![image]()

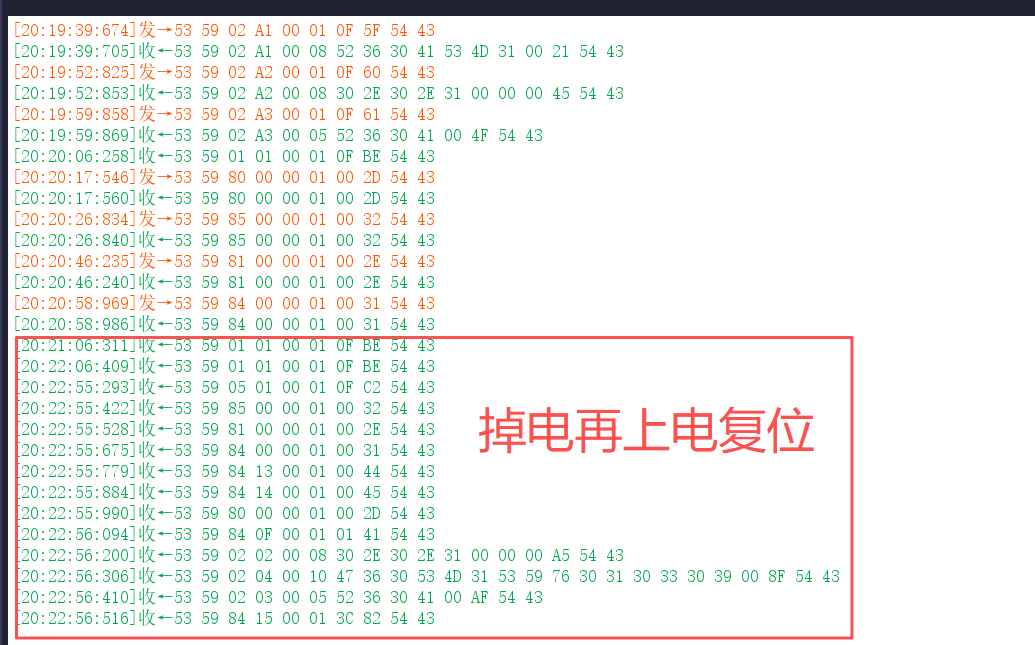

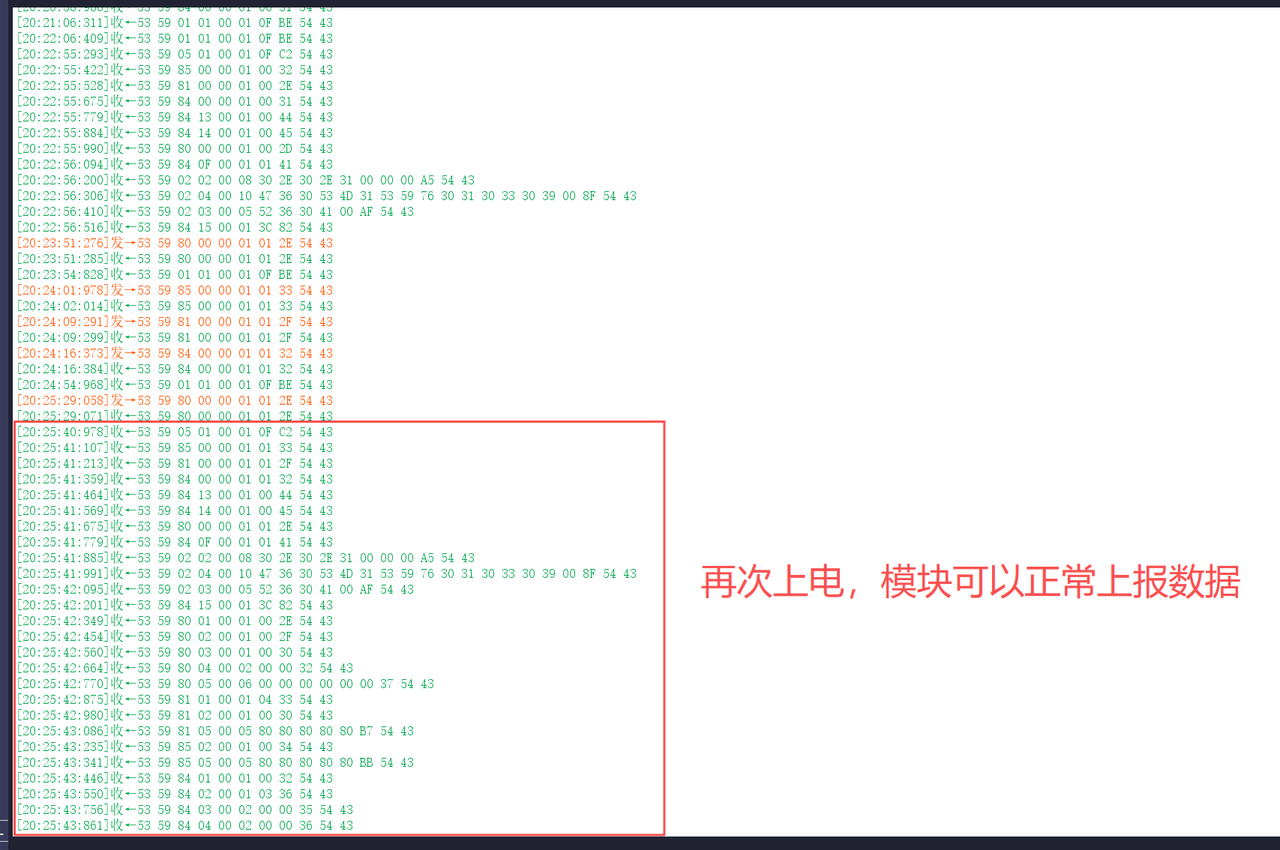
可以看到當所有主動上報功能被禁用後,模組在斷電重啓過程中未能正確初始化其功能狀態機或配置寄存器,導致系統進入了一個功能“靜默”的異常狀態。
這裏,筆者猜測根本原因可能源於固件的狀態管理邏輯存在缺陷。具體分析如下:
- 配置存儲與加載異常:
- 推測:設備的使能狀態標誌可能存儲於非易失性存儲器中。當所有功能關閉時,存儲的或許是一個特殊的“全關”狀態值。模組在下次啓動加載該配置時,固件可能錯誤地將此狀態解析為“不進行任何上報”,而非“等待用户指令”,從而阻塞了所有上報通道。
- 佐證:只有再次“全部開啓”並重啓後,存儲的狀態被更新,系統才恢復正常。這表明正確的配置在第二次重啓後被成功加載。
- 功能狀態機死鎖:
- 推測:各個上報功能可能共享一個公共的使能邏輯或硬件資源。當所有功能被禁用時,該邏輯可能錯誤地進入了一個休眠或鎖死狀態。此時,通過指令單獨開啓某一功能,無法有效觸發狀態機的解鎖。而同時開啓所有功能,則發送了一個足夠強的“全局喚醒”信號,重置了整個狀態機。
- 底層驅動或中間件漏洞:
- 推測:負責管理雷達傳感器核心功能的底層驅動或中間件,可能存在一個邊界條件漏洞。當它檢測到沒有任何主動上報功能需要服務時,可能會徹底關閉數據採集或中斷服務例程。而重新激活該採集流程需要一個更高級別的初始化命令(即“全部開啓”),而非單個功能的開關指令。
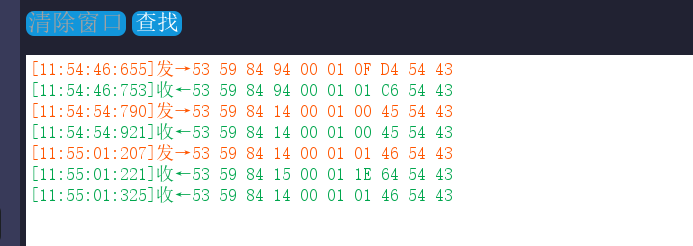
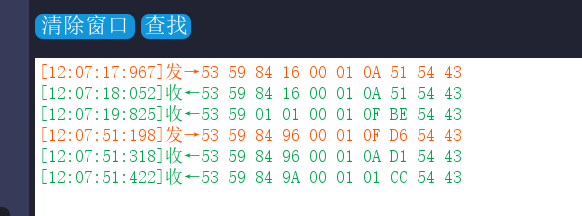
2.2.2 開啓無人計時功能時響應與手冊所寫不一致
在新版固件(G60SM1SYv010309)上,發現一個異常操作序列,版本信息如下:
- 固件版本:
G60SM1SYv010309(16進製為47 36 30 53 4D 31 53 59 76 30 31 30 33 30 39 00) - 產品型號:
R60ASM1(16進製為52 36 30 41 53 4D 31 00) - 硬件版本:
R60A(16進製為52 36 30 41 00)
問題如下:
- 預期行為(根據手冊):
- 主機下發設置指令:53 59 84 14 00 01 01 ...
- 從設備回覆確認幀:53 59 84 14 00 01 01 ... (原樣返回,作為操作成功的確認)
- 觀察到的實際行為:
- 主機下發設置指令:53 59 84 14 00 01 01 46 54 43 (開啓無人計時功能)
- 從設備回覆了兩條信息:
- 第一條:53 59 84 15 00 01 1E 64 54 43 (這是一個對命令字 0x15 ——“無人計時時長查詢”的響應,數據 1E 表示時長為30分鐘)
- 第二條:53 59 84 14 00 01 01 46 54 43 (這才是手冊中描述的,對設置命令的正確確認幀)
![image]()
這種行為不符合典型的“命令-應答”模式,當開啓無人計時功能時,固件內部自動觸發了一次無人計時時長的查詢操作。

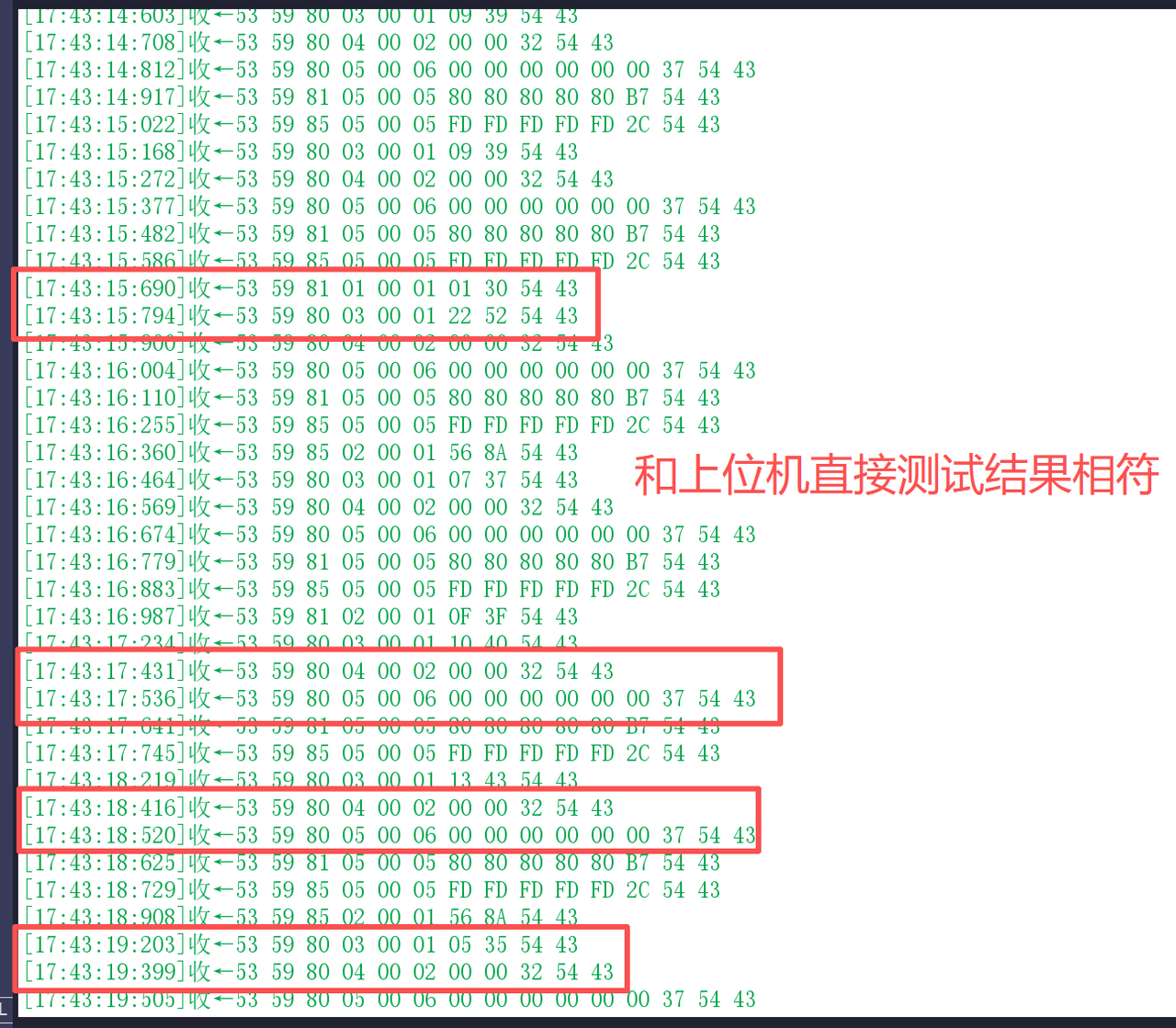
2.2.3 設置睡眠截止時長時響應與手冊所寫不一致
在新版固件(G60SM1SYv010309)上,發現一個異常操作序列,版本信息如下:
- 固件版本:G60SM1SYv010309(16進製為 47 36 30 53 4D 31 53 59 76 30 31 30 33 30 39 00)
- 產品型號:R60ASM1(16進製為 52 36 30 41 53 4D 31 00)
- 硬件版本:R60A(16進製為 52 36 30 41 00)
問題如下:在設置睡眠截止時長後,進行查詢操作時,觀察到的實際通信序列與手冊説明存在不一致:
- 設置睡眠截止時長(10分鐘):
- 發送指令:53 59 84 16 00 01 0A 51 54 43
- 收到確認回覆:53 59 84 16 00 01 0A 51 54 43(符合預期,設備原樣返回確認幀)。 - 後續查詢操作:
- 發送睡眠截止時間查詢指令:53 59 84 96 00 01 0F D6 54 43
- 收到兩條回覆:- 第一條回覆:53 59 84 96 00 01 0A D1 54 43(預期中的查詢回覆,數據 0A 表示睡眠截止時長為10分鐘)。
- 第二條回覆:53 59 84 9A 00 01 01 CC 54 43(非預期的回覆,對應命令字 0x9A,即“掙扎狀態判讀查詢”的回覆,數據 01 表示靈敏度為中)。
在睡眠截止時間查詢後,設備額外返回了一個“掙扎狀態判讀”的回覆幀,而主機並未發送該查詢指令。

三、MicroPython 驅動整體架構設計
3.1 整體架構設計
整體架構採用 “數據解析與業務邏輯分離” 的設計思路,核心包含兩個組件:DataFlowProcessor與 R60ABD1,通過明確分工實現模塊化協作:
DataFlowProcessor專注於 “數據管道” 的底層處理:負責從串口讀取原始字節流,維護緩衝區以應對粘包、半包問題,通過幀頭、幀尾標識拆分出完整數據幀,並從幀中解析出DP標識(數據點ID)與對應原始數據,最終輸出 (dp_id,raw_data) 結構。這一組件完全不涉及業務邏輯,例如它不會處理 “dp_id=1對應有人 / 無人狀態” 這類映射,僅負責數據的流轉與格式提取,實現了與業務的徹底解耦。這種設計帶來顯著的複用價值 —— 若更換同系列傳感器(幀頭、幀尾等基礎協議一致,僅DP定義不同),可直接複用該組件,只需修改上層業務邏輯即可。R60ABD1組件則聚焦於業務屬性管理:它持有DataFlowProcessor實例,通過定時器觸發數據讀取流程,接收其輸出的 (dp_id,raw_data) 後,負責將原始數據轉換為具體業務屬性(例如將raw_data=0x01映射為 “有人狀態”),並提供簡潔的屬性查詢接口(如獲取當前人體存在狀態、心率值等)。兩者通過組合關係協作,使整體邏輯更清晰精簡,符合嵌入式開發的 “功能模塊化” 思想。
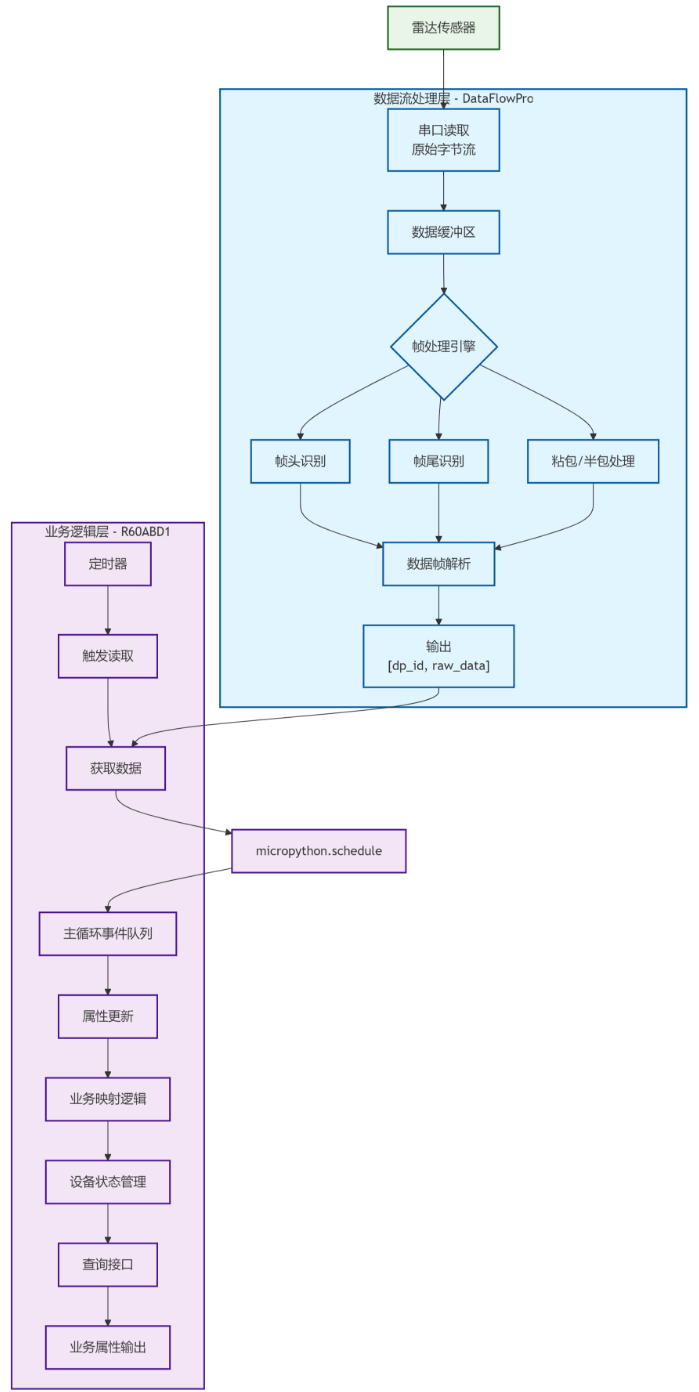
此外,設計中引入 micropython.schedule 機制保障系統穩定性:定時器回調屬於中斷上下文,若直接在其中執行屬性更新(_update_properties,可能涉及內存操作或複雜計算),易引發中斷嵌套、資源競爭等問題,甚至導致系統崩潰。而 schedule 會將更新操作放入主循環的事件隊列,在合適時機執行,避免了中斷上下文的風險。
對於緩衝區中出現的粘包或半包數據,考慮到雷達輸出的是實時監測數據,無需保留歷史不完整幀,直接丟棄即可。這種處理方式可簡化緩衝區邏輯,避免複雜的幀恢復機制,同時因實時數據會持續輸出,後續完整幀能快速補充,不影響監測的連續性。
3.2 DataFlowProcessor類的設計與性能驗證
在R60ABD1呼吸睡眠監測毫米波雷達的MicroPython驅動開發中,數據解析層與業務邏輯層的分離設計是確保代碼可維護性與性能的關鍵。以下從定時週期確定、DataFlowProcessor功能架構、性能測試驗證三個維度,詳解其設計與實現邏輯。
3.2.1 定時器調用週期的確定:匹配設備數據輸出頻率
要確保串口數據無丟失、無積壓,需先明確設備的數據幀輸出間隔。通過串口助手對R60ABD1的實時數據監測,發現兩個數據幀之間的最短間隔約為 100ms(主動上報情況下,如果是命令-響應模式最短30ms左右)。
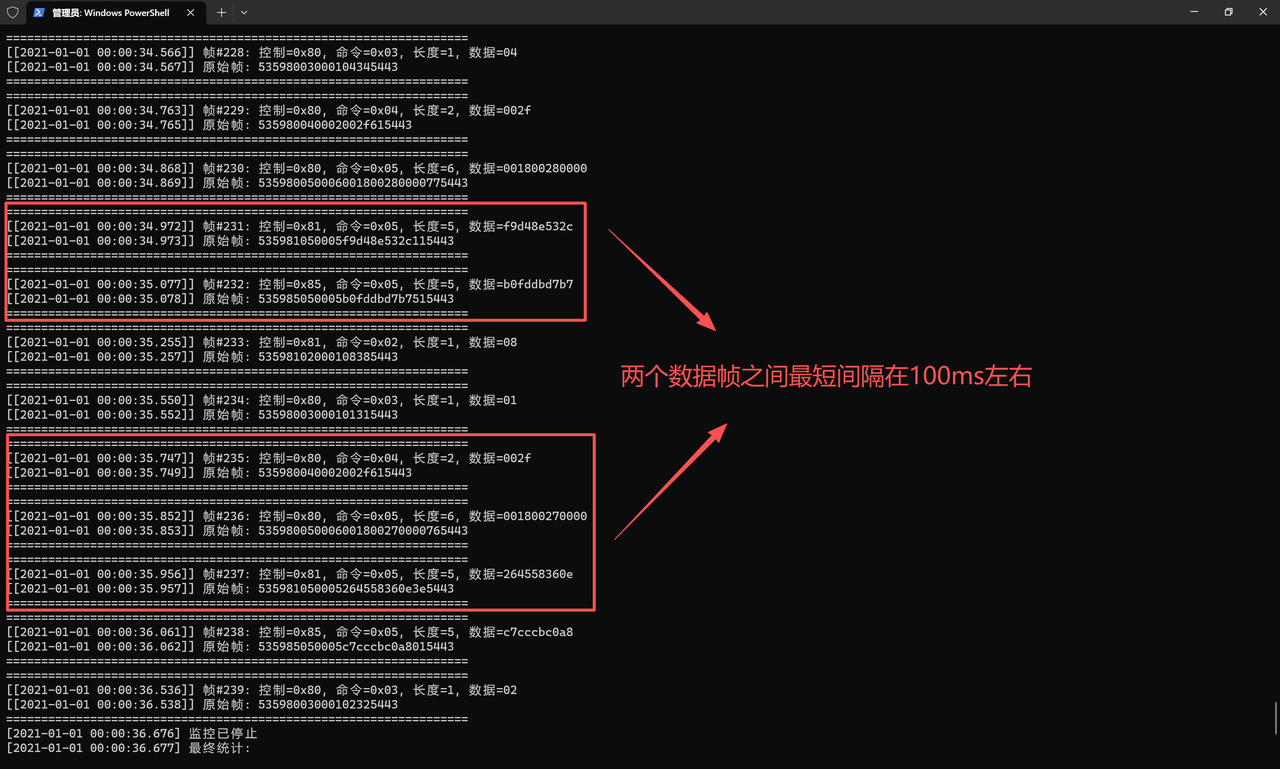
基於此,與DataFlowProcessor實例配合的定時器觸發週期需設置為 小於 100ms (例如 50ms)。這樣既能及時讀取串口緩衝區數據,又不會因觸發過於頻繁佔用過多系統資源,從而實現數據的高效、無丟失採集。
3.2.2 DataFlowProcessor類-解耦數據管道與業務邏輯的核心組件
DataFlowProcessor類是 “數據解析層” 的核心,專注於串口數據的流轉與協議解析,完全與業務邏輯(如 “呼吸率映射為具體數值”)解耦。其設計遵循 “高內聚、低耦合” 的模塊化思想,以下從屬性定義和方法功能兩方面展開説明。
3.2.2.1 核心屬性:承載數據與狀態
class DataFlowProcessor:
def __init__(self, uart):
self.uart = uart # 串口通信實例,負責底層收發
self.buffer = bytearray() # 數據緩衝區,處理粘包/半包
self.stats = { # 統計信息,用於調試與異常分析
'total_bytes_received': 0,
'total_frames_parsed': 0,
'crc_errors': 0,
'frame_errors': 0,
'invalid_frames': 0
}
self.max_buffer_size = 128 # 緩衝區容量限制,防止內存溢出
# 幀結構常量(與協議強綁定)
self.HEADER = bytes([0x53, 0x59])
self.TRAILER = bytes([0x54, 0x43])
# 各字段長度定義(幀頭、控制字、命令字等)
self.HEADER_LEN = 2
self.CONTROL_LEN = 1
self.COMMAND_LEN = 1
self.LENGTH_LEN = 2
self.CRC_LEN = 1
self.TRAILER_LEN = 2
self.MIN_FRAME_LEN = self.HEADER_LEN + self.CONTROL_LEN + self.COMMAND_LEN + self.LENGTH_LEN + self.CRC_LEN + self.TRAILER_LEN
3.2.2.2 核心方法:從 “數據讀取” 到 “幀解析” 的完整鏈路
3.2.2.2.1 read_and_parse 數據讀取與幀解析的入口
該方法是數據處理的 “主流程”,負責:
- 從串口讀取數據(每次最多讀 32 字節,避免阻塞);
- 管理緩衝區(防止溢出,清理已解析數據);
- 循環提取完整數據幀,執行幀頭識別、長度解析、幀尾驗證、CRC 校驗;
- 返回解析成功的幀列表,供上層業務邏輯使用。
def read_and_parse(self):
data = self.uart.read(32) # 單次讀取32字節,平衡效率與阻塞風險
if not data:
return []
self.stats['total_bytes_received'] += len(data)
self.buffer.extend(data) # 數據存入緩衝區
frames = []
processed_bytes = 0
while len(self.buffer) - processed_bytes >= self.MIN_FRAME_LEN:
# 查找幀頭(_find_header)
header_pos = self._find_header(processed_bytes)
if header_pos == -1:
break
# 解析數據長度(_parse_data_length)
length_pos = header_pos + self.HEADER_LEN + self.CONTROL_LEN + self.COMMAND_LEN
data_len = self._parse_data_length(length_pos)
total_frame_len = self.HEADER_LEN + self.CONTROL_LEN + self.COMMAND_LEN + self.LENGTH_LEN + data_len + self.CRC_LEN + self.TRAILER_LEN
# 提取並驗證完整幀(幀尾_validate_trailer、CRC_validate_crc)
frame_data = self.buffer[header_pos:header_pos+total_frame_len]
if not self._validate_trailer(frame_data):
self.stats['frame_errors'] += 1
processed_bytes = header_pos + 1
continue
if not self._validate_crc(frame_data):
self.stats['crc_errors'] += 1
processed_bytes = header_pos + total_frame_len
continue
# 解析單幀(_parse_single_frame)
parsed_frame = self._parse_single_frame(frame_data)
if parsed_frame:
frames.append(parsed_frame)
self.stats['total_frames_parsed'] += 1
else:
self.stats['invalid_frames'] += 1
processed_bytes = header_pos + total_frame_len
# 清理已處理數據
if processed_bytes > 0:
self.buffer = self.buffer[processed_bytes:]
return frames
3.2.2.2.2 幀頭、長度、幀尾、CRC 的輔助解析方法
相關方法如下:
_find_header(start_pos):在緩衝區中線性搜索幀頭0x53 0x59,定位一幀的起始位置;_parse_data_length(length_pos):按大端格式解析 “數據長度” 字段,確定數據段的字節數;_validate_trailer(frame_data):驗證幀尾0x54 0x43,確保幀結構完整;_validate_crc(frame_data):對 “幀頭到數據段” 的所有字節求和,取低 8 位與幀中 CRC 字段比對,過濾無效幀;_parse_single_frame(frame_data):將完整幀拆解為 “幀頭、控制字、命令字、數據、CRC、幀尾” 等字段,封裝為字典返回。
3.2.2.2.3 指令發送與工具方法
相關方法如下:
build_and_send_frame(control_byte, command_byte, data):按協議格式組裝指令幀(包含幀頭、控制字、命令字、長度、數據、CRC、幀尾),並通過串口發送,支持設備配置(如切換監測模式);get_stats():返回數據流轉的統計信息(接收字節數、解析幀數、各類錯誤數),用於調試;clear_buffer():清空緩衝區,在異常恢復或重連時使用。
3.2.2.2.4 完整代碼
如下所示:
# Python env : MicroPython v1.23.0
# -*- coding: utf-8 -*-
# @Time : 2025/11/4 下午6:38
# @Author : 李清水
# @File : data_flow_processor.py
# @Description : 用於處理R60ABD1雷達設備串口通信協議的數據流處理器類相關代碼
# @License : CC BY-NC 4.0
# ======================================== 導入相關模塊 =========================================
# ======================================== 全局變量 ============================================
# ======================================== 功能函數 ============================================
# ======================================== 自定義類 ============================================
class DataFlowProcessor:
"""
R60ABD1 雷達設備串口通信協議的數據流處理器類。
負責處理雷達設備的串口數據通信,包括數據幀的接收、解析、校驗和發送。
Attributes:
uart (UART): 串口通信實例,用於數據收發。
buffer (bytearray): 數據緩衝區,用於存儲接收到的原始字節數據。
stats (dict): 數據流轉與解析統計信息字典,包含:
total_bytes_received (int): 總接收字節數
total_frames_parsed (int): 總解析幀數
crc_errors (int): CRC校驗錯誤次數
frame_errors (int): 幀結構錯誤次數
invalid_frames (int): 無效幀次數
max_buffer_size (int): 緩衝區最大容量限制。
Methods:
__init__(uart): 初始化數據流處理器。
read_and_parse(): 讀取串口數據並解析完整幀。
_find_header(start_pos=0): 在緩衝區中查找幀頭位置。
_parse_data_length(length_pos): 解析數據長度(大端格式)。
_validate_trailer(frame_data): 驗證幀尾。
_validate_crc(frame_data): 驗證CRC校驗碼。
_parse_single_frame(frame_data): 解析單個數據幀。
get_stats(): 獲取數據流轉與解析統計信息。
clear_buffer(): 清空緩衝區。
build_and_send_frame(control_byte, command_byte, data=b''): 構建併發送數據幀。
_calculate_crc(data_bytes): 計算CRC校驗碼。
==========================================
Data flow processor class for R60ABD1 radar device UART communication protocol.
Handles UART data communication for radar devices, including data frame reception,
parsing, validation, and transmission.
Attributes:
uart (UART): UART communication instance for data transmission and reception.
buffer (bytearray): Data buffer for storing received raw byte data.
stats (dict): Data flow and parsing statistics dictionary containing:
total_bytes_received (int): Total bytes received
total_frames_parsed (int): Total frames parsed
crc_errors (int): CRC validation error count
frame_errors (int): Frame structure error count
invalid_frames (int): Invalid frame count
max_buffer_size (int): Maximum buffer capacity limit.
Methods:
__init__(uart): Initialize data flow processor.
read_and_parse(): Read UART data and parse complete frames.
_find_header(start_pos=0): Find frame header position in buffer.
_parse_data_length(length_pos): Parse data length (big-endian format).
_validate_trailer(frame_data): Validate frame trailer.
_validate_crc(frame_data): Validate CRC checksum.
_parse_single_frame(frame_data): Parse single data frame.
get_stats(): Get data flow and parsing statistics.
clear_buffer(): Clear buffer.
build_and_send_frame(control_byte, command_byte, data=b''): Build and send data frame.
_calculate_crc(data_bytes): Calculate CRC checksum.
"""
def __init__(self, uart):
"""
初始化數據流處理器。
Args:
uart (UART): 已初始化的串口實例,用於數據收發。
Returns:
None
Note:
- 初始化時創建空緩衝區和統計信息字典。
- 定義幀結構相關常量,包括幀頭、幀尾、各字段長度等。
- 設置緩衝區最大容量為128字節,防止內存溢出。
==========================================
Initialize data flow processor.
Args:
uart (UART): Initialized UART instance for data transmission and reception.
Returns:
None
Note:
- Creates empty buffer and statistics dictionary during initialization.
- Defines frame structure constants including header, trailer, field lengths, etc.
- Sets maximum buffer capacity to 128 bytes to prevent memory overflow.
"""
self.uart = uart
self.buffer = bytearray()
self.stats = {
'total_bytes_received': 0,
'total_frames_parsed': 0,
'crc_errors': 0,
'frame_errors': 0,
'invalid_frames': 0
}
self.max_buffer_size = 128
# 幀結構常量定義
self.HEADER = bytes([0x53, 0x59])
self.TRAILER = bytes([0x54, 0x43])
self.HEADER_LEN = 2
self.CONTROL_LEN = 1
self.COMMAND_LEN = 1
self.LENGTH_LEN = 2
self.CRC_LEN = 1
self.TRAILER_LEN = 2
self.MIN_FRAME_LEN = self.HEADER_LEN + self.CONTROL_LEN + self.COMMAND_LEN + self.LENGTH_LEN + self.CRC_LEN + self.TRAILER_LEN
def read_and_parse(self):
"""
讀取串口數據並解析完整幀。
Args:
無
Returns:
list: 解析成功的數據幀列表,每個元素為解析後的幀字典。
[]: 無完整幀或解析失敗時返回空列表。
Raises:
Exception: 底層串口操作可能拋出的異常會向上傳播。
Note:
- 每次讀取最多32字節數據,避免阻塞時間過長。
- 採用滑動窗口方式處理緩衝區,逐步解析完整幀。
- 自動處理CRC校驗和幀結構驗證,統計各類錯誤信息。
- 方法執行期間會更新統計信息,調用get_stats()可獲取最新狀態。
==========================================
Read UART data and parse complete frames.
Args:
None
Returns:
list: List of successfully parsed data frames, each element is a parsed frame dictionary.
[]: Returns empty list when no complete frames or parsing fails.
Raises:
Exception: Underlying UART operations may raise exceptions that propagate upward.
Note:
- Reads up to 32 bytes per call to avoid long blocking times.
- Uses sliding window approach to process buffer and gradually parse complete frames.
- Automatically handles CRC validation and frame structure verification, statistics various error types.
- Updates statistics during execution, call get_stats() to get latest status.
"""
# 讀取串口數據
data = self.uart.read(32)
if not data:
return []
# 更新統計信息
self.stats['total_bytes_received'] += len(data)
# 檢查緩衝區大小
if len(self.buffer) > self.max_buffer_size:
self.clear_buffer()
# 將數據添加到緩衝區
self.buffer.extend(data)
frames = []
processed_bytes = 0
while len(self.buffer) - processed_bytes >= self.MIN_FRAME_LEN:
# 查找幀頭
header_pos = self._find_header(processed_bytes)
if header_pos == -1:
# 沒有找到更多幀頭,跳出循環
break
# 從找到的幀頭位置開始
current_pos = header_pos
# 檢查是否有足夠數據解析長度字段
if current_pos + self.HEADER_LEN + self.CONTROL_LEN + self.COMMAND_LEN + self.LENGTH_LEN > len(self.buffer):
break
# 解析數據長度(大端格式)
length_pos = current_pos + self.HEADER_LEN + self.CONTROL_LEN + self.COMMAND_LEN
data_len = self._parse_data_length(length_pos)
# 計算完整幀長度
total_frame_len = self.HEADER_LEN + self.CONTROL_LEN + self.COMMAND_LEN + self.LENGTH_LEN + data_len + self.CRC_LEN + self.TRAILER_LEN
# 檢查是否有完整的幀
if current_pos + total_frame_len > len(self.buffer):
break
# 提取完整幀數據
frame_end = current_pos + total_frame_len
frame_data = self.buffer[current_pos:frame_end]
# 驗證幀尾
if not self._validate_trailer(frame_data):
self.stats['frame_errors'] += 1
# 幀尾錯誤,跳過這個幀頭,繼續查找下一個
processed_bytes = current_pos + 1
continue
# 驗證CRC
if not self._validate_crc(frame_data):
self.stats['crc_errors'] += 1
# CRC錯誤,跳過這個幀,繼續查找下一個
processed_bytes = current_pos + total_frame_len
continue
# 解析單幀
parsed_frame = self._parse_single_frame(frame_data)
if parsed_frame:
frames.append(parsed_frame)
self.stats['total_frames_parsed'] += 1
else:
self.stats['invalid_frames'] += 1
# 移動到下一幀
processed_bytes = current_pos + total_frame_len
# 清理已處理的數據
if processed_bytes > 0:
self.buffer = self.buffer[processed_bytes:]
return frames
def _find_header(self, start_pos=0):
"""
在緩衝區中查找幀頭位置。
Args:
start_pos (int): 起始搜索位置,默認為0。
Returns:
int: 找到的幀頭位置索引,未找到返回-1。
Note:
- 幀頭為固定字節序列 [0x53, 0x59]。
- 搜索範圍從start_pos到緩衝區末尾-1(需要連續兩個字節)。
- 採用線性搜索算法,時間複雜度O(n)。
==========================================
Find frame header position in buffer.
Args:
start_pos (int): Starting search position, defaults to 0.
Returns:
int: Found header position index, returns -1 if not found.
Note:
- Frame header is fixed byte sequence [0x53, 0x59].
- Search range from start_pos to buffer end-1 (requires two consecutive bytes).
- Uses linear search algorithm with O(n) time complexity.
"""
for i in range(start_pos, len(self.buffer) - 1):
if self.buffer[i] == self.HEADER[0] and self.buffer[i + 1] == self.HEADER[1]:
return i
return -1
def _parse_data_length(self, length_pos):
"""
解析數據長度(大端格式)。
Args:
length_pos (int): 長度字段在緩衝區中的起始位置。
Returns:
int: 解析出的數據長度值,解析失敗返回0。
Note:
- 長度字段採用大端格式存儲:高字節在前,低字節在後。
- 需要確保length_pos+1不超出緩衝區範圍。
- 返回值為數據部分的實際字節長度。
==========================================
Parse data length (big-endian format).
Args:
length_pos (int): Starting position of length field in buffer.
Returns:
int: Parsed data length value, returns 0 if parsing fails.
Note:
- Length field uses big-endian format: high byte first, low byte last.
- Ensures length_pos+1 does not exceed buffer bounds.
- Return value is the actual byte length of data portion.
"""
if length_pos + 1 >= len(self.buffer):
return 0
# 大端格式:高字節在前,低字節在後
return (self.buffer[length_pos] << 8) | self.buffer[length_pos + 1]
def _validate_trailer(self, frame_data):
"""
驗證幀尾。
Args:
frame_data (bytes|bytearray): 完整幀數據。
Returns:
bool: 幀尾驗證通過返回True,否則返回False。
Note:
- 幀尾為固定字節序列 [0x54, 0x43]。
- 檢查幀數據最後兩個字節是否匹配幀尾。
- 幀尾驗證失敗表明幀結構不完整或數據損壞。
==========================================
Validate frame trailer.
Args:
frame_data (bytes|bytearray): Complete frame data.
Returns:
bool: Returns True if trailer validation passes, False otherwise.
Note:
- Frame trailer is fixed byte sequence [0x54, 0x43].
- Checks if last two bytes of frame data match trailer.
- Trailer validation failure indicates incomplete frame structure or data corruption.
"""
if len(frame_data) < 2:
return False
return (frame_data[-2] == self.TRAILER[0] and
frame_data[-1] == self.TRAILER[1])
def _validate_crc(self, frame_data):
"""
驗證CRC校驗碼。
Args:
frame_data (bytes|bytearray): 完整幀數據。
Returns:
bool: CRC驗證通過返回True,否則返回False。
Note:
- CRC校驗範圍:幀頭到數據部分(不包括CRC字節和幀尾)。
- 計算方式:對校驗數據求和後取低8位。
- CRC位於幀數據倒數第3個字節位置。
==========================================
Validate CRC checksum.
Args:
frame_data (bytes|bytearray): Complete frame data.
Returns:
bool: Returns True if CRC validation passes, False otherwise.
Note:
- CRC check range: from header to data portion (excluding CRC byte and trailer).
- Calculation method: sum check data and take lower 8 bits.
- CRC is located at the third last byte of frame data.
"""
if len(frame_data) < 3:
return False
# 計算校驗和(不包括CRC字節和幀尾)
data_to_check = frame_data[:-3]
calculated_crc = sum(data_to_check) & 0xFF
received_crc = frame_data[-3]
return calculated_crc == received_crc
def _parse_single_frame(self, frame_data):
"""
解析單個數據幀。
Args:
frame_data (bytes|bytearray): 完整幀數據。
Returns:
dict|None: 解析成功返回幀信息字典,解析失敗返回None。
Raises:
Exception: 解析過程中發生異常時記錄錯誤信息。
Note:
- 按協議格式依次解析:幀頭→控制字→命令字→長度字段→數據→CRC→幀尾。
- 返回字典包含所有解析出的字段和原始數據。
- 解析失敗會記錄到invalid_frames統計中。
==========================================
Parse single data frame.
Args:
frame_data (bytes|bytearray): Complete frame data.
Returns:
dict|None: Returns frame information dictionary on success, None on failure.
Raises:
Exception: Records error information when exceptions occur during parsing.
Note:
- Parses sequentially according to protocol format: header→control→command→length→data→CRC→trailer.
- Return dictionary contains all parsed fields and raw data.
- Parsing failures are recorded in invalid_frames statistics.
"""
try:
pos = 0
# 解析幀頭 (2字節)
header = bytes(frame_data[pos:pos + 2])
pos += 2
# 控制字 (1字節)
control_byte = frame_data[pos]
pos += 1
# 命令字 (1字節)
command_byte = frame_data[pos]
pos += 1
# 長度標識 (2字節)
data_length = (frame_data[pos] << 8) | frame_data[pos + 1]
pos += 2
# 數據 (n字節)
data_end = pos + data_length
if data_end > len(frame_data) - 3: # -3 為CRC(1)+幀尾(2)
return None
data = bytes(frame_data[pos:data_end])
pos = data_end
# CRC (1字節)
crc = frame_data[pos]
pos += 1
# 幀尾 (2字節)
trailer = bytes(frame_data[pos:pos + 2])
# 構建解析結果
parsed_frame = {
'header': header,
'control_byte': control_byte,
'command_byte': command_byte,
'data_length': data_length,
'data': data,
'crc': crc,
'trailer': trailer,
'raw_data': bytes(frame_data)
}
return parsed_frame
except Exception as e:
print(f"Frame parsing error: {e}")
return None
def get_stats(self):
"""
獲取數據流轉與解析統計信息。
Args:
無
Returns:
dict: 包含所有統計信息的字典副本。
Note:
- 返回統計信息的深拷貝,防止外部修改影響內部數據。
- 統計信息包括:接收字節數、解析幀數、各類錯誤計數等。
==========================================
Get data flow and parsing statistics.
Args:
None
Returns:
dict: Dictionary containing all statistics information (copy).
Note:
- Returns deep copy of statistics to prevent external modifications affecting internal data.
- Statistics include: received bytes, parsed frames, various error counts, etc.
"""
return self.stats.copy()
def clear_buffer(self):
"""
清空緩衝區。
Args:
無
Returns:
None
Note:
- 將緩衝區重置為空bytearray。
- 通常在緩衝區過大或需要重新開始解析時調用。
==========================================
Clear buffer.
Args:
None
Returns:
None
Note:
- Resets buffer to empty bytearray.
- Typically called when buffer is too large or need to restart parsing.
"""
self.buffer = bytearray()
def build_and_send_frame(self, control_byte, command_byte, data=b''):
"""
構建併發送數據幀。
Args:
control_byte (int): 控制字,1字節無符號整數。
command_byte (int): 命令字,1字節無符號整數。
data (bytes): 數據部分,默認為空字節。
Returns:
bytes|None: 構建好的完整幀數據(用於調試),發送失敗返回None。
Raises:
Exception: 幀構建或發送過程中發生異常時記錄錯誤信息。
Note:
- 按照協議格式構建完整幀:幀頭→控制字→命令字→長度→數據→CRC→幀尾。
- 自動計算數據長度和CRC校驗碼。
- 通過串口發送構建好的幀數據。
==========================================
Build and send data frame.
Args:
control_byte (int): Control byte, 1-byte unsigned integer.
command_byte (int): Command byte, 1-byte unsigned integer.
data (bytes): Data portion, defaults to empty bytes.
Returns:
bytes|None: Built complete frame data (for debugging), returns None on send failure.
Raises:
Exception: Records error information when exceptions occur during frame building or sending.
Note:
- Builds complete frame according to protocol format: header→control→command→length→data→CRC→trailer.
- Automatically calculates data length and CRC checksum.
- Sends built frame data via UART.
"""
try:
# 幀頭
header = self.HEADER
# 控制字和命令字
control = bytes([control_byte])
command = bytes([command_byte])
# 數據長度(大端格式)
data_length = len(data)
length_bytes = bytes([(data_length >> 8) & 0xFF, data_length & 0xFF])
# 組裝除CRC和幀尾的部分
frame_without_crc = header + control + command + length_bytes + data
# 計算CRC
crc = self._calculate_crc(frame_without_crc)
# 幀尾A
trailer = self.TRAILER
# 完整幀
complete_frame = frame_without_crc + bytes([crc]) + trailer
# 發送幀
self.uart.write(complete_frame)
return complete_frame
except Exception as e:
print(f"Frame building and sending error: {e}")
return None
def _calculate_crc(self, data_bytes):
"""
計算CRC校驗碼。
Args:
data_bytes (bytes): 需要計算CRC的數據字節序列。
Returns:
int: 計算出的CRC校驗碼(1字節)。
Note:
- 校驗碼計算:對輸入數據所有字節求和後,取低8位。
- 此CRC算法為簡單求和校驗,適用於基本錯誤檢測。
- CRC校驗範圍通常為幀頭到數據部分。
==========================================
Calculate CRC checksum.
Args:
data_bytes (bytes): Data byte sequence for CRC calculation.
Returns:
int: Calculated CRC checksum (1 byte).
Note:
- Checksum calculation: sum all input data bytes and take lower 8 bits.
- This CRC algorithm uses simple sum check, suitable for basic error detection.
- CRC check range typically from header to data portion.
"""
return sum(data_bytes) & 0xFF
# ======================================== 初始化配置 ==========================================
# ======================================== 主程序 ===========================================
3.2.3 性能驗證
為確保 DataFlowProcessor 在 MicroPython 環境下的可靠性,需從解析耗時方面驗證。
相關測試代碼如下:
# Python env :
# -*- coding: utf-8 -*-
# @Time : 2025/11/4 下午5:33
# @Author : 李清水
# @File : main.py
# @Description :
from machine import UART, Pin, Timer
import time
from data_flow_processor import DataFlowProcessor
frame_count = 0
# 存儲解析到的數據幀
parsed_frames_buffer = []
# 初始化UART0:TX=16, RX=17,波特率115200
uart = UART(0, baudrate=115200, tx=Pin(16), rx=Pin(17), timeout=0)
# 創建DataFlowProcessor實例
processor = DataFlowProcessor(uart)
# ======================================== 功能函數 ============================================
# 計時裝飾器,用於計算函數運行時間
def timed_function(f: callable, *args: tuple, **kwargs: dict) -> callable:
_"""_
_ 計時裝飾器,用於計算並打印函數/方法運行時間。_
_ Args:_
_ f (callable): 需要傳入的函數/方法_
_ args (tuple): 函數/方法 f 傳入的任意數量的位置參數_
_ kwargs (dict): 函數/方法 f 傳入的任意數量的關鍵字參數_
_ Returns:_
_ callable: 返回計時後的函數_
_ """_
_ _myname = str(f).split(' ')[1]
def new_func(*args: tuple, **kwargs: dict) -> any:
t: int = time.ticks_us()
result = f(*args, **kwargs)
delta: int = time.ticks_diff(time.ticks_us(), t)
print('Function {} Time = {:6.3f}ms'.format(myname, delta / 1000))
return result
return new_func
def format_time():
_"""格式化當前時間為 [YYYY-MM-DD HH:MM:SS.sss] 格式"""_
_ _t = time.localtime()
ms = time.ticks_ms() % 1000
return f"[{t[0]}-{t[1]:02d}-{t[2]:02d} {t[3]:02d}:{t[4]:02d}:{t[5]:02d}.{ms:03d}]"
@timed_function
def timer_callback(timer):
_"""定時器回調函數,每50ms觸發一次,直接解析數據幀"""_
_ _global frame_count, parsed_frames_buffer
# 直接調用解析方法
frames = processor.read_and_parse()
# 將解析到的幀添加到緩衝區
for frame in frames:
frame_count += 1
parsed_frames_buffer.append({
'frame_number': frame_count,
'control': frame['control_byte'],
'command': frame['command_byte'],
'data_length': frame['data_length'],
'data_hex': frame['data'].hex() if frame['data'] else "",
'raw_hex': frame['raw_data'].hex(),
'timestamp': format_time()
})
# 初始化50ms定時器
timer = Timer(-1)
timer.init(period=50, mode=Timer.PERIODIC, callback=timer_callback)
try:
while True:
# 檢查是否需要打印緩衝區中的幀(每10個打印一次)
if len(parsed_frames_buffer) >= 10:
print("=====================================================")
for frame_data in parsed_frames_buffer:
print("[%s] Frame#%d: Control=0x%02X, Command=0x%02X, Length=%d, Data=%s" % (frame_data['timestamp'], frame_data['frame_number'], frame_data['control'], frame_data['command'], frame_data['data_length'], frame_data['data_hex']))
print("[%s] Raw frame: %s" % (frame_data['timestamp'], frame_data['raw_hex']))
print("-" * 60)
print("=====================================================")
# 清空緩衝區
parsed_frames_buffer = []
# 小延遲,避免佔用太多CPU
time.sleep(0.01)
except KeyboardInterrupt:
# 停止定時器
timer.deinit()
# 打印剩餘未輸出的幀
if parsed_frames_buffer:
print("=====================================================")
print("[%s] Final output %d parsed frames:" % (format_time(), len(parsed_frames_buffer)))
for frame_data in parsed_frames_buffer:
print("[%s] Frame#%d: Control=0x%02X, Command=0x%02X, Length=%d, Data=%s" % (frame_data['timestamp'], frame_data['frame_number'], frame_data['control'], frame_data['command'], frame_data['data_length'], frame_data['data_hex']))
print("[%s] Raw frame: %s" % (frame_data['timestamp'], frame_data['raw_hex']))
print("-" * 60)
# 輸出最終統計信息
stats = processor.get_stats()
print("[%s] Final statistics:" % format_time())
print(" Total bytes received: %d" % stats['total_bytes_received'])
print(" Total frames parsed: %d" % stats['total_frames_parsed'])
print(" CRC errors: %d" % stats['crc_errors'])
print(" Frame errors: %d" % stats['frame_errors'])
print(" Invalid frames: %d" % stats['invalid_frames'])
測試結果如下:
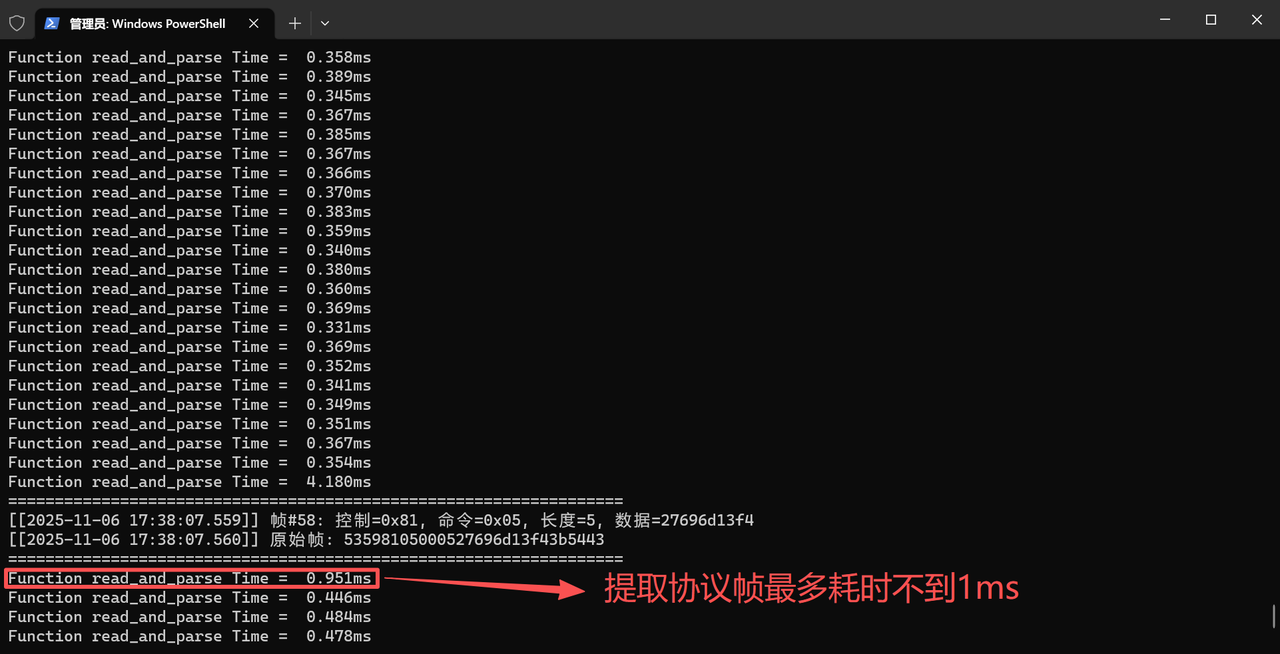
通過在 read_and_parse() 方法中插入時間統計,發現單幀解析耗時最多不到 1ms,遠小於數據幀的最短間隔(100ms)。這意味着即使在 MicroPython 的解釋性執行環境下,該組件也能及時處理數據,不會因解析耗時導致數據積壓或丟失。
3.3 R60ABD1 類的設計:業務邏輯層的模塊化封裝
R60ABD1 類作為業務邏輯層的核心,負責將 DataFlowProcessor 解析出的原始數據映射為可讀的業務屬性(如呼吸率、心率、睡眠狀態等),並提供設備控制接口。其設計遵循 “功能模塊化、狀態清晰化” 的原則,以下從實例屬性、類屬性與常量、私有解析方法、測試驗證四個維度展開説明。
3.3.1 實例屬性設計:按功能模塊分層隔離
根據手冊下面的描述,我們首先歸納實例屬性包括哪些:
為了讓業務邏輯更清晰、可維護,R60ABD1 的實例屬性按功能領域進行分層設計,每個模塊的屬性專注於特定業務場景:
3.1.1.1 系統控制與狀態屬性
self.parse_interval = parse_interval # 數據解析週期,適配設備數據輸出頻率
self.max_retries = max_retries # 指令重試次數,保障通信可靠性
self.retry_delay = retry_delay # 重試間隔,避免頻繁重試導致設備負載過高
self.init_timeout = init_timeout # 初始化超時時間,防止設備未響應時無限等待
# 運行狀態標誌
self._is_running = False # 設備是否處於運行狀態
self._initialization_complete = False # 初始化是否完成
self._configuration_errors = [] # 配置錯誤記錄,用於異常排查
這類屬性用於設備全局控制(如初始化、重試策略),是保障設備穩定運行的基礎。
3.1.1.2 系統級監控屬性
# 心跳包監控
self.heartbeat_last_received = 0 # 最後接收心跳包的時間戳(ms)
self.heartbeat_timeout_count = 0 # 心跳超時累計次數
self.heartbeat_interval = 0 # 實際心跳間隔統計(ms)
# 系統狀態
self.system_initialized = False # 初始化完成狀態
self.system_initialized_timestamp = 0 # 初始化完成時間戳(ms)
self.module_reset_flag = False # 模組復位狀態標記
self.module_reset_timestamp = 0 # 模組復位時間戳(ms)
# 產品信息
self.product_model = "" # 產品型號(如“R60ABD1”)
self.product_id = "" # 產品ID(唯一標識)
self.hardware_model = "" # 硬件型號
self.firmware_version = "" # 固件版本(如“G60SM1SYv010309”)
這類屬性用於設備健康度與身份識別,幫助開發者快速定位設備狀態(如是否初始化、固件版本是否兼容)。
3.1.1.3 雷達探測與人體存在屬性
# 位置狀態
self.radar_in_range = False # 是否在雷達探測範圍內
# 人體存在基本狀態
self.presence_enabled = presence_enabled # 人體存在功能開關
self.presence_status = 0 # 存在狀態(0=無人,1=有人)
self.motion_status = 0 # 運動狀態(0=無,1=靜止,2=活躍)
# 量化數據
self.movement_parameter = 0 # 體動參數(0-100)
self.human_distance = 0 # 人體距離(0-65535 cm)
self.human_position_x = 0 # 人體X座標(有符號)
self.human_position_y = 0 # 人體Y座標(有符號)
self.human_position_z = 0 # 人體Z座標(有符號)
這類屬性聚焦人體存在與運動監測,是雷達 “環境感知” 能力的直接體現。
3.1.1.4 呼吸監測屬性
# 功能配置
self.breath_monitoring_enabled = breath_monitoring_enabled # 呼吸監測開關
self.breath_waveform_enabled = False # 呼吸波形上報開關
self.low_breath_threshold = 10 # 低緩呼吸閾值(10-20次/min)
# 監測數據
self.breath_status = 0 # 呼吸狀態(1=正常,2=過高,3=過低,4=無)
self.breath_value = 0 # 呼吸數值(0-35次/分)
self.breath_waveform = [0, 0, 0, 0, 0] # 5字節呼吸波形數據
這類屬性圍繞呼吸健康監測,覆蓋 “功能開關 → 實時數值 → 波形數據” 的完整鏈路。
3.1.1.5 心率監測屬性
# 功能配置
self.heart_rate_enabled = heart_rate_enabled # 心率監測開關
self.heart_rate_waveform_enabled = False # 心率波形上報開關
# 監測數據
self.heart_rate_value = 0 # 心率數值(60-120次/分)
self.heart_rate_waveform = [0, 0, 0, 0, 0] # 5字節心率波形數據
這類屬性與 “呼吸監測” 結構對稱,確保心率數據的一致性管理。
3.1.1.6 睡眠監測屬性
# 基礎狀態
self.sleep_monitoring_enabled = sleep_monitoring_enabled # 睡眠監測開關
# 入牀/離牀與睡眠狀態
self.bed_status = 0 # 牀狀態(0=離牀,1=入牀,2=無)
self.sleep_status = 0 # 睡眠狀態(0=深睡,1=淺睡,2=清醒,3=無)
# 時長統計
self.awake_duration = 0 # 清醒時長(分鐘)
self.light_sleep_duration = 0 # 淺睡時長(分鐘)
self.deep_sleep_duration = 0 # 深睡時長(分鐘)
# 睡眠質量與異常
self.sleep_quality_score = 0 # 睡眠質量評分(0-100)
self.sleep_quality_rating = 0 # 睡眠質量評級
self.sleep_comprehensive_status = {} # 睡眠綜合狀態(8字段字典)
self.sleep_anomaly = 0 # 睡眠異常狀態
self.abnormal_struggle_status = 0 # 異常掙扎狀態
self.no_person_timing_status = 0 # 無人計時狀態
# 配置參數
self.abnormal_struggle_enabled = abnormal_struggle_enabled # 異常掙扎開關
self.no_person_timing_enabled = no_person_timing_enabled # 無人計時開關
self.no_person_timing_duration = no_person_timing_duration # 無人計時時長
self.sleep_cutoff_duration = sleep_cutoff_duration # 睡眠截止時長
self.struggle_sensitivity = struggle_sensitivity # 掙扎靈敏度
這類屬性是睡眠監測的核心載體,從 “狀態 → 時長 → 質量 → 異常” 多維度刻畫睡眠健康。
3.1.1.7 查詢與定時器管理屬性
# 查詢狀態管理
self._query_in_progress = False # 是否有查詢在進行中
self._query_response_received = False # 是否收到查詢響應
self._query_result = None # 查詢結果
self._current_query_type = None # 當前查詢類型
self._query_timeout = 200 # 默認查詢超時時間(ms)
# 內部定時器
self._timer = Timer(-1) # 用於週期性任務(如心跳檢測、數據解析)
這類屬性用於設備交互的底層管理(如查詢流程、定時器調度),對上層業務透明。
3.3.2 類屬性與常量:業務規則的集中化定義
為了避免硬編碼、提升代碼可讀性,R60ABD1 通過類屬性與常量封裝業務規則、指令類型和狀態映射:
3.3.2.1 調試與狀態常量
# 是否啓用調試(全局開關,便於日誌輸出與問題排查)
DEBUG_ENABLED = False
# 運動、呼吸、睡眠等狀態的枚舉映射
MOTION_NONE, MOTION_STATIC, MOTION_ACTIVE = (0x00, 0x01, 0x02)
BREATH_NORMAL, BREATH_HIGH, BREATH_LOW, BREATH_NONE = (0x01, 0x02, 0x03, 0x04)
BED_LEAVE, BED_ENTER, BED_NONE = (0x00, 0x01, 0x02)
SLEEP_DEEP, SLEEP_LIGHT, SLEEP_AWAKE, SLEEP_NONE = (0x00, 0x01, 0x02, 0x03)
# ... 其他狀態枚舉(如睡眠異常、質量評級等)
這些常量將 “數值 → 業務含義” 的映射集中化,例如 MOTION_ACTIVE 直接對應 “人體活躍狀態”,避免代碼中散落的字面量。
3.3.2.2 指令類型與映射表
# 指令類型常量(區分查詢、控制、設置操作)
TYPE_QUERY_HEARTBEAT = 0 # 心跳包查詢
TYPE_MODULE_RESET = 1 # 模組復位
TYPE_QUERY_PRODUCT_MODEL = 2 # 產品型號查詢
# ... 人體存在、心率、呼吸、睡眠等模塊的指令類型(共60+種)
# 指令映射表:將指令類型映射為“控制字、命令字、數據”的協議參數
COMMAND_MAP = {
TYPE_QUERY_HEARTBEAT: {
'control_byte': 0x01,
'command_byte': 0x80,
'data': bytes([0x0F])
},
# ... 其他指令的協議參數映射
}
# 查詢類型到名稱的映射(用於調試輸出,提升日誌可讀性)
QUERY_NAME_MAP = {
TYPE_QUERY_HEARTBEAT: "Heartbeat",
TYPE_MODULE_RESET: "Module Reset",
# ... 其他指令的名稱映射
}
這類映射表是 “業務指令 → 底層協議” 的翻譯層,例如業務層調用 “查詢產品型號” 時,可通過 COMMAND_MAP 直接獲取對應的串口幀參數,無需關注協議細節。
3.3.3 私有解析方法:原始數據到業務屬性的轉換
R60ABD1 通過一系列私有方法將 DataFlowProcessor 解析出的原始字節轉換為業務屬性,這些方法聚焦 “數據格式解析”,與業務邏輯解耦:
3.3.3.1 人體位置解析(帶符號 16 位特殊格式)
def _parse_human_position_data(self, data_bytes):
"""解析人體方位數據(6字節:X(2B)、Y(2B)、Z(2B)),支持特殊符號位格式"""
if len(data_bytes) != 6:
return (0, 0, 0)
x = self._parse_signed_16bit_special(data_bytes[0:2])
y = self._parse_signed_16bit_special(data_bytes[2:4])
z = self._parse_signed_16bit_special(data_bytes[4:6])
return (x, y, z)
def _parse_signed_16bit_special(self, two_bytes):
"""解析特殊有符號16位數據(首位為符號位,後15位為數值)"""
if len(two_bytes) != 2:
return 0
unsigned_value = (two_bytes[0] << 8) | two_bytes[1]
sign_bit = (unsigned_value >> 15) & 0x1
magnitude = unsigned_value & 0x7FFF
return -magnitude if sign_bit else magnitude
例如,原始字節 0x80 0x0F 會被解析為 -32753(符號位為 1,數值位為 0x000F),精準還原人體座標的正負與數值。
3.3.3.2 波形數據解析(心率、呼吸通用邏輯)
def _parse_heart_rate_waveform_data(self, data_bytes):
"""解析心率波形數據(5字節,還原實時波形數值)"""
if len(data_bytes) != 5:
return (128, 128, 128, 128, 128)
return (data_bytes[0], data_bytes[1], data_bytes[2], data_bytes[3], data_bytes[4])
def _parse_breath_waveform_data(self, data_bytes):
"""解析呼吸波形數據(5字節,邏輯與心率波形一致)"""
if len(data_bytes) != 5:
return (128, 128, 128, 128, 128)
return (data_bytes[0], data_bytes[1], data_bytes[2], data_bytes[3], data_bytes[4])
這類方法將原始字節直接映射為波形數值(如 0xC1→193),為 “波形可視化” 等上層功能提供基礎數據。
3.3.3.3 睡眠數據解析(綜合狀態與統計信息)
def _parse_sleep_comprehensive_data(self, data_bytes):
"""解析睡眠綜合狀態數據(8字節,多維度睡眠信息)"""
if len(data_bytes) != 8:
return (0, 0, 0, 0, 0, 0, 0, 0)
return (
data_bytes[0], # 存在狀態
data_bytes[1], # 睡眠狀態
data_bytes[2], # 平均呼吸
data_bytes[3], # 平均心跳
data_bytes[4], # 翻身次數
data_bytes[5], # 大幅度體動佔比
data_bytes[6], # 小幅度體動佔比
data_bytes[7] # 呼吸暫停次數
)
def _parse_sleep_statistics_data(self, data_bytes):
"""解析睡眠統計信息數據(12字節,時長、質量等彙總)"""
if len(data_bytes) != 12:
return (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0)
total_sleep_duration = (data_bytes[1] << 8) | data_bytes[2]
return (
data_bytes[0], # 睡眠質量評分
total_sleep_duration, # 睡眠總時長
data_bytes[3], # 清醒時長佔比
data_bytes[4], # 淺睡時長佔比
data_bytes[5], # 深睡時長佔比
data_bytes[6], # 離牀時長
data_bytes[7], # 離牀次數
data_bytes[8], # 翻身次數
data_bytes[9], # 平均呼吸
data_bytes[10], # 平均心跳
data_bytes[11] # 呼吸暫停次數
)
這類方法將複雜的睡眠數據拆解為可讀的業務指標,例如 “睡眠總時長” 由兩個字節的大端數據拼接而成。
3.3.3.4 產品與固件信息解析(字符串處理)
def _parse_product_info_data(self, data_bytes):
"""解析產品信息(含空字節的字符串處理)"""
try:
if R60ABD1.DEBUG_ENABLED:
print(f"[Parse] Raw product data: {data_bytes}, hex: {data_bytes.hex()}")
# 截取空字節前的有效部分
if b'\x00' in data_bytes:
null_index = data_bytes.index(b'\x00')
valid_data = data_bytes[:null_index]
else:
valid_data = data_bytes
return (valid_data.decode('utf-8', errors='ignore').strip(),)
except Exception as e:
if R60ABD1.DEBUG_ENABLED:
print(f"[Parse] Product info parse error: {e}, data: {data_bytes}")
return ("",)
def _parse_firmware_version_data(self, data_bytes):
"""解析固件版本(邏輯與產品信息一致)"""
try:
if R60ABD1.DEBUG_ENABLED:
print(f"[Parse] Raw firmware data: {data_bytes}, hex: {data_bytes.hex()}")
if b'\x00' in data_bytes:
null_index = data_bytes.index(b'\x00')
valid_data = data_bytes[:null_index]
else:
valid_data = data_bytes
return (valid_data.decode('utf-8', errors='ignore').strip(),)
except Exception as e:
if R60ABD1.DEBUG_ENABLED:
print(f"[Parse] Firmware version parse error: {e}, data: {data_bytes}")
return ("",)
這類方法處理 “帶空字節的字符串” 場景,確保產品型號、固件版本等信息能被正確解析為 Python 字符串。
3.3.4 解析邏輯的測試驗證:REPL 環境下的正確性校驗
為確保解析方法的可靠性,需在 MicroPython 的 REPL 環境中進行數據一致性測試,驗證 “原始字節 → 業務屬性” 的轉換是否符合預期:
# 模擬DataFlowProcessor(僅用於測試)
class MockDataProcessor:
pass
# 初始化R60ABD1實例
device = R60ABD1(MockDataProcessor())
# 測試用例1:人體方位數據解析
human_position_data = bytes([0x80, 0x0F, 0x00, 0x2C, 0x00, 0x00])
result = device._parse_human_position_data(human_position_data)
print("人體方位數據:", result)
# 預期輸出:(-32753, 44, 0) (驗證符號位與數值的正確轉換)
# 測試用例2:心率波形數據解析
heart_rate_waveform_data = bytes([0xC1, 0xBE, 0xAA, 0x90, 0x8A])
result = device._parse_heart_rate_waveform_data(heart_rate_waveform_data)
print("心率波形數據:", result)
# 預期輸出:(193, 190, 170, 144, 138) (驗證字節到數值的直接映射)
# 測試用例3:呼吸波形數據解析
breath_waveform_data = bytes([0xC9, 0x60, 0x18, 0x40, 0x9A])
result = device._parse_breath_waveform_data(breath_waveform_data)
print("呼吸波形數據:", result)
# 預期輸出:(201, 96, 24, 64, 154) (邏輯與心率波形一致)
# 測試用例4:睡眠綜合狀態解析
sleep_comprehensive_data = bytes([0x01, 0x02, 0x12, 0x4B, 0x00, 0x26, 0x3E, 0x00])
result = device._parse_sleep_comprehensive_data(sleep_comprehensive_data)
print("睡眠綜合狀態數據:", result)
# 預期輸出:(1, 2, 18, 75, 0, 38, 62, 0) (多維度睡眠信息的正確拆解)
# 測試用例5:睡眠統計信息解析
sleep_statistics_data = bytes([0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00])
result = device._parse_sleep_statistics_data(sleep_statistics_data)
print("睡眠統計信息數據:", result)
# 預期輸出:(0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0) (全零場景的兼容性)
測試結果正常,如下所示:
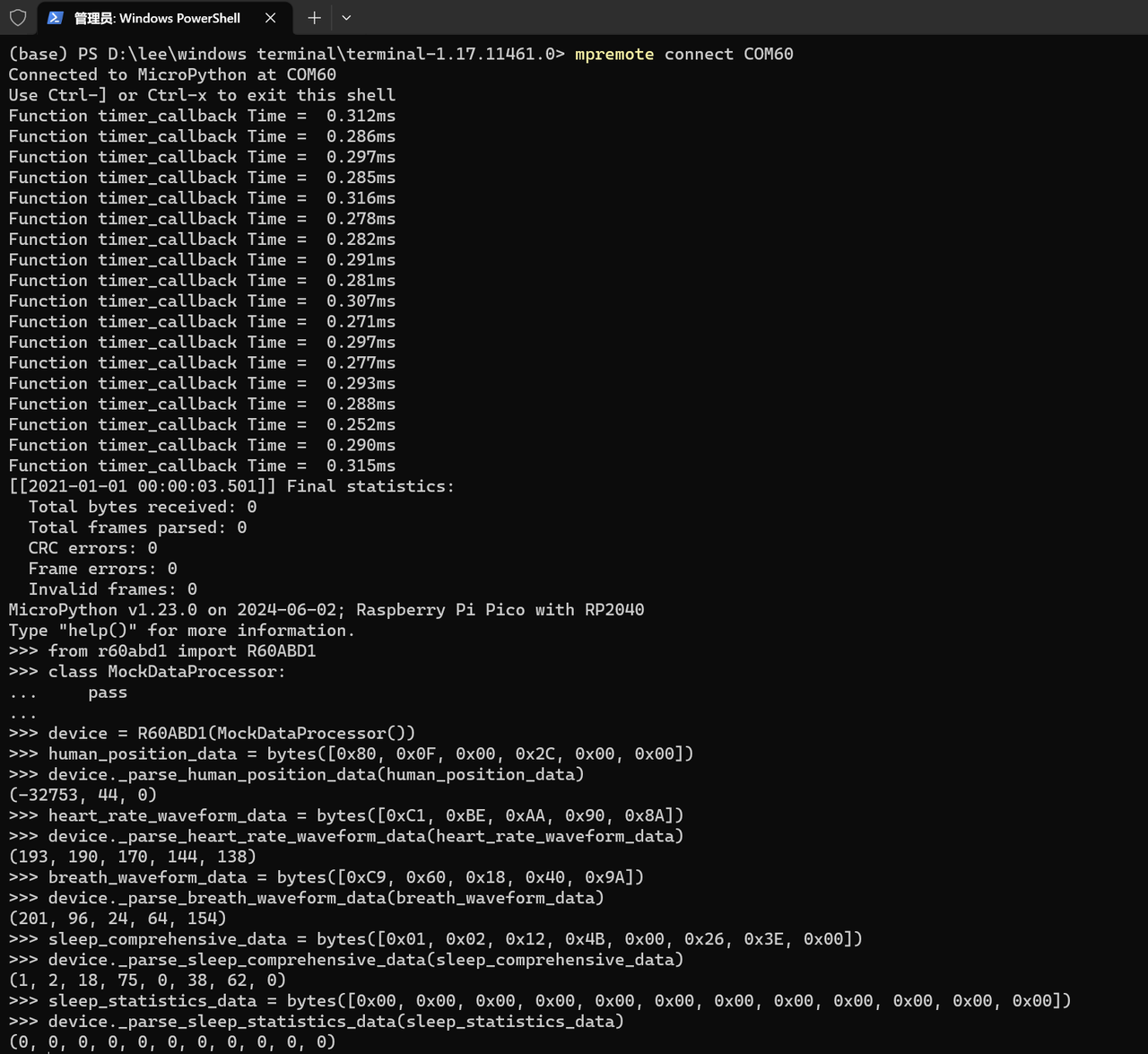
通過上述測試,可驗證所有解析方法能精準轉換原始字節為業務屬性,為後續 update_properties_from_frame 方法的實現奠定了可靠基礎。
3.3.5 update_properties_from_frame 方法:業務屬性的更新入口
update_properties_from_frame 是 R60ABD1 類銜接 “數據解析層” 與 “業務邏輯層” 的核心方法,負責將 DataFlowProcessor 解析的原始幀數據映射為可讀的業務屬性,並實現屬性的分層、實時更新。
3.3.5.1 方法設計目的:數據到業務的 “翻譯器”
該方法承擔 “原始幀數據 → 業務屬性” 的翻譯與更新職責 ,是業務邏輯層感知設備狀態的 “橋樑”。它接收 DataFlowProcessor 輸出的幀字典,通過 控制字 和 命令字 的組合判斷,將字節數據轉換為結構化的業務屬性(如呼吸率、心率、人體存在狀態等),最終支撐設備的健康監測、狀態分析等上層應用。
3.3.5.2 屬性更新時機的分層策略:匹配數據頻率
為平衡 “實時性” 與 “資源消耗”,建議調用驅動庫的開發者需根據數據輸出頻率分層處理屬性更新:
- 高頻數據(<100ms):如人體存在狀態、運動狀態。這類數據變化快,需立即更新屬性,確保業務層實時感知環境變化。
- 中頻數據(1-3s):如呼吸 / 心率波形、體動參數。這類數據用於趨勢分析(如波形可視化),更新頻率稍緩但需保證數據完整性。
- 低頻數據(>10s):如睡眠狀態、質量評分。這類數據為彙總性指標,更新間隔較長,收到幀時一次性處理即可。
3.3.5.3 方法具體實現:模塊化分支解析
這裏,為了快速測試可行性,我們在 mian.py 中進行測試,用全局變量模擬屬性值,在相關函數中通過 控制字+命令字 的組合判斷,將不同類型的幀數據路由到對應屬性的更新邏輯中:
# Python env :
# -*- coding: utf-8 -*-
# @Time : 2025/11/4 下午5:33
# @Author : 李清水
# @File : main.py
# @Description :
from machine import UART, Pin, Timer
import time
from data_flow_processor import DataFlowProcessor
import micropython
frame_count = 0
# 存儲解析到的數據幀
parsed_frames_buffer = []
# 初始化UART0:TX=16, RX=17,波特率115200
uart = UART(0, baudrate=115200, tx=Pin(16), rx=Pin(17), timeout=0)
# 創建DataFlowProcessor實例
processor = DataFlowProcessor(uart)
# ======================================== 功能函數 ============================================
# 計時裝飾器,用於計算函數運行時間
def timed_function(f: callable, *args: tuple, **kwargs: dict) -> callable:
_"""_
_ 計時裝飾器,用於計算並打印函數/方法運行時間。_
_ Args:_
_ f (callable): 需要傳入的函數/方法_
_ args (tuple): 函數/方法 f 傳入的任意數量的位置參數_
_ kwargs (dict): 函數/方法 f 傳入的任意數量的關鍵字參數_
_ Returns:_
_ callable: 返回計時後的函數_
_ """_
_ _myname = str(f).split(' ')[1]
def new_func(*args: tuple, **kwargs: dict) -> any:
t: int = time.ticks_us()
result = f(*args, **kwargs)
delta: int = time.ticks_diff(time.ticks_us(), t)
print('Function {} Time = {:6.3f}ms'.format(myname, delta / 1000))
return result
return new_func
def format_time():
_"""格式化當前時間為 [YYYY-MM-DD HH:MM:SS.sss] 格式"""_
_ _t = time.localtime()
ms = time.ticks_ms() % 1000
return f"[{t[0]}-{t[1]:02d}-{t[2]:02d} {t[3]:02d}:{t[4]:02d}:{t[5]:02d}.{ms:03d}]"
@timed_function
def timer_callback(timer):
_"""定時器回調函數,每50ms觸發一次,直接解析數據幀"""_
_ _global frame_count, parsed_frames_buffer
# 直接調用解析方法
frames = processor.read_and_parse()
# 將解析到的幀添加到緩衝區
for frame in frames:
frame_count += 1
parsed_frames_buffer.append({
'frame_number': frame_count,
'control': frame['control_byte'],
'command': frame['command_byte'],
'data_length': frame['data_length'],
'data_hex': frame['data'].hex() if frame['data'] else "",
'raw_hex': frame['raw_data'].hex(),
'timestamp': format_time()
})
# 更新屬性
micropython.schedule(update_properties_from_frame, frame)
@timed_function
def update_properties_from_frame(frame):
_"""根據解析的幀更新屬性值"""_
_ _global heartbeat_last_received, presence_status, motion_status, movement_parameter
global human_distance, human_position_x, human_position_y, human_position_z
global breath_status, breath_value, breath_waveform
global heart_rate_value, heart_rate_waveform
global radar_in_range, system_initialized
control = frame['control_byte']
command = frame['command_byte']
data = frame['data']
current_time = time.ticks_ms()
# 心跳包 (0x01)
if control == 0x01 and command == 0x01:
heartbeat_last_received = current_time
print("[%s] Heartbeat received" % format_time())
# 系統初始化狀態 (0x05)
elif control == 0x05 and command == 0x01:
if data and len(data) > 0:
system_initialized = (data[0] == 0x01)
print("[%s] System initialized: %s" % (format_time(), "Yes" if system_initialized else "No"))
# 雷達探測範圍 (0x07)
elif control == 0x07 and command == 0x07:
if data and len(data) > 0:
radar_in_range = (data[0] == 0x01)
print("[%s] Radar in range: %s" % (format_time(), "Yes" if radar_in_range else "No"))
# 人體存在狀態 (0x80)
elif control == 0x80:
if command == 0x01: # 存在信息
if data and len(data) > 0:
presence_status = data[0]
status_text = "No one" if presence_status == 0 else "Someone"
print("[%s] Presence status: %s" % (format_time(), status_text))
elif command == 0x02: # 運動信息
if data and len(data) > 0:
motion_status = data[0]
status_text = ["No motion", "Static", "Active"][motion_status] if motion_status < 3 else "Unknown"
print("[%s] Motion status: %s" % (format_time(), status_text))
elif command == 0x03: # 體動參數
if data and len(data) > 0:
movement_parameter = data[0]
print("[%s] Movement parameter: %d" % (format_time(), movement_parameter))
elif command == 0x04: # 人體距離
if data and len(data) >= 2:
human_distance = data[0] | (data[1] << 8)
print("[%s] Human distance: %d cm" % (format_time(), human_distance))
elif command == 0x05: # 人體方位
if data and len(data) >= 6:
human_position_x = data[0] | (data[1] << 8)
human_position_y = data[2] | (data[3] << 8)
human_position_z = data[4] | (data[5] << 8)
print("[%s] Human position: X=%d, Y=%d, Z=%d" % (
format_time(), human_position_x, human_position_y, human_position_z))
# 呼吸監測 (0x81)
elif control == 0x81:
if command == 0x01: # 呼吸狀態
if data and len(data) > 0:
breath_status = data[0]
status_text = ["Normal", "High", "Low", "None"][
breath_status - 1] if 1 <= breath_status <= 4 else "Unknown"
print("[%s] Breath status: %s" % (format_time(), status_text))
elif command == 0x02: # 呼吸數值
if data and len(data) > 0:
breath_value = data[0]
print("[%s] Breath value: %d" % (format_time(), breath_value))
elif command == 0x05: # 呼吸波形
if data and len(data) >= 5:
breath_waveform = list(data[:5])
print("[%s] Breath waveform updated" % format_time())
# 心率監測 (0x85)
elif control == 0x85:
if command == 0x02: # 心率數值
if data and len(data) > 0:
heart_rate_value = data[0]
print("[%s] Heart rate: %d" % (format_time(), heart_rate_value))
elif command == 0x05: # 心率波形
if data and len(data) >= 5:
heart_rate_waveform = list(data[:5])
print("[%s] Heart rate waveform updated" % format_time())
# ======================================== 全局屬性變量 ============================================
# 1. 系統級屬性
heartbeat_last_received = 0
heartbeat_timeout_count = 0
heartbeat_interval = 0
system_initialized = False
system_initialized_timestamp = 0
module_reset_flag = False
module_reset_timestamp = 0
product_model = ""
product_id = ""
hardware_model = ""
firmware_version = ""
# 2. 雷達探測屬性
radar_in_range = False
radar_in_range_timestamp = 0
# 3. 人體存在檢測屬性
presence_enabled = True
presence_status = 0
presence_status_timestamp = 0
motion_status = 0
motion_status_timestamp = 0
movement_parameter = 0
movement_parameter_timestamp = 0
human_distance = 0
human_distance_timestamp = 0
human_position_x = 0
human_position_y = 0
human_position_z = 0
human_position_timestamp = 0
# 4. 呼吸監測屬性
breath_monitoring_enabled = True
breath_waveform_enabled = False
low_breath_threshold = 10
breath_status = 0
breath_status_timestamp = 0
breath_value = 0
breath_value_timestamp = 0
breath_waveform = [0, 0, 0, 0, 0]
breath_waveform_timestamp = 0
# 5. 心率監測屬性
heart_rate_enabled = True
heart_rate_waveform_enabled = False
heart_rate_value = 0
heart_rate_value_timestamp = 0
heart_rate_waveform = [0, 0, 0, 0, 0]
heart_rate_waveform_timestamp = 0
# 6. 睡眠監測屬性
sleep_monitoring_enabled = True
bed_status = 0
bed_status_timestamp = 0
sleep_status = 0
sleep_status_timestamp = 0
awake_duration = 0
light_sleep_duration = 0
deep_sleep_duration = 0
sleep_quality_score = 0
sleep_quality_rating = 0
sleep_comprehensive_status = {}
sleep_anomaly = 0
abnormal_struggle_status = 0
no_person_timing_status = 0
abnormal_struggle_enabled = False
no_person_timing_enabled = False
no_person_timing_duration = 30
sleep_cutoff_duration = 120
struggle_sensitivity = 1
# ======================================== 主程序 ============================================
# 初始化50ms定時器
timer = Timer(-1)
timer.init(period=50, mode=Timer.PERIODIC, callback=timer_callback)
# 測試計數器
test_counter = 0
last_print_time = time.ticks_ms()
try:
while True:
current_time = time.ticks_ms()
# 檢查是否需要打印緩衝區中的幀(每10個打印一次)
if len(parsed_frames_buffer) >= 10:
print("=====================================================")
for frame_data in parsed_frames_buffer:
print("[%s] Frame#%d: Control=0x%02X, Command=0x%02X, Length=%d, Data=%s" % (frame_data['timestamp'], frame_data['frame_number'], frame_data['control'], frame_data['command'], frame_data['data_length'], frame_data['data_hex']))
print("[%s] Raw frame: %s" % (frame_data['timestamp'], frame_data['raw_hex']))
print("-" * 60)
print("=====================================================")
# 清空緩衝區
parsed_frames_buffer = []
# 每5秒打印一次屬性狀態摘要
if time.ticks_diff(current_time, last_print_time) >= 5000:
last_print_time = current_time
test_counter += 1
print("[%s] Property Status Summary (Test #%d)" % (format_time(), test_counter))
print("******************************************************************************************")
# 系統狀態
print("System: Heartbeat=%d, Initialized=%s" % (
heartbeat_last_received, "Yes" if system_initialized else "No"))
# 雷達狀態
print("Radar: InRange=%s" % ("Yes" if radar_in_range else "No"))
# 人體存在
presence_text = "No one" if presence_status == 0 else "Someone"
motion_text = ["No motion", "Static", "Active"][motion_status] if motion_status < 3 else "Unknown"
print("Presence: Status=%s, Motion=%s, Distance=%dcm" % (presence_text, motion_text, human_distance))
# 呼吸監測
breath_status_text = ["Normal", "High", "Low", "None"][
breath_status - 1] if 1 <= breath_status <= 4 else "Unknown"
print("Breath: Status=%s, Value=%d" % (breath_status_text, breath_value))
print("******************************************************************************************")
# 心率監測
print("Heart Rate: Value=%d" % heart_rate_value)
except KeyboardInterrupt:
# 停止定時器
timer.deinit()
# 打印剩餘未輸出的幀
if parsed_frames_buffer:
print("=====================================================")
print("[%s] Final output %d parsed frames:" % (format_time(), len(parsed_frames_buffer)))
for frame_data in parsed_frames_buffer:
print("[%s] Frame#%d: Control=0x%02X, Command=0x%02X, Length=%d, Data=%s" % (frame_data['timestamp'], frame_data['frame_number'], frame_data['control'], frame_data['command'], frame_data['data_length'], frame_data['data_hex']))
print("[%s] Raw frame: %s" % (frame_data['timestamp'], frame_data['raw_hex']))
print("-" * 60)
# 輸出最終統計信息
stats = processor.get_stats()
print("[%s] Final statistics:" % format_time())
print(" Total bytes received: %d" % stats['total_bytes_received'])
print(" Total frames parsed: %d" % stats['total_frames_parsed'])
print(" CRC errors: %d" % stats['crc_errors'])
print(" Frame errors: %d" % stats['frame_errors'])
print(" Invalid frames: %d" % stats['invalid_frames'])
3.3.5.4 性能測試
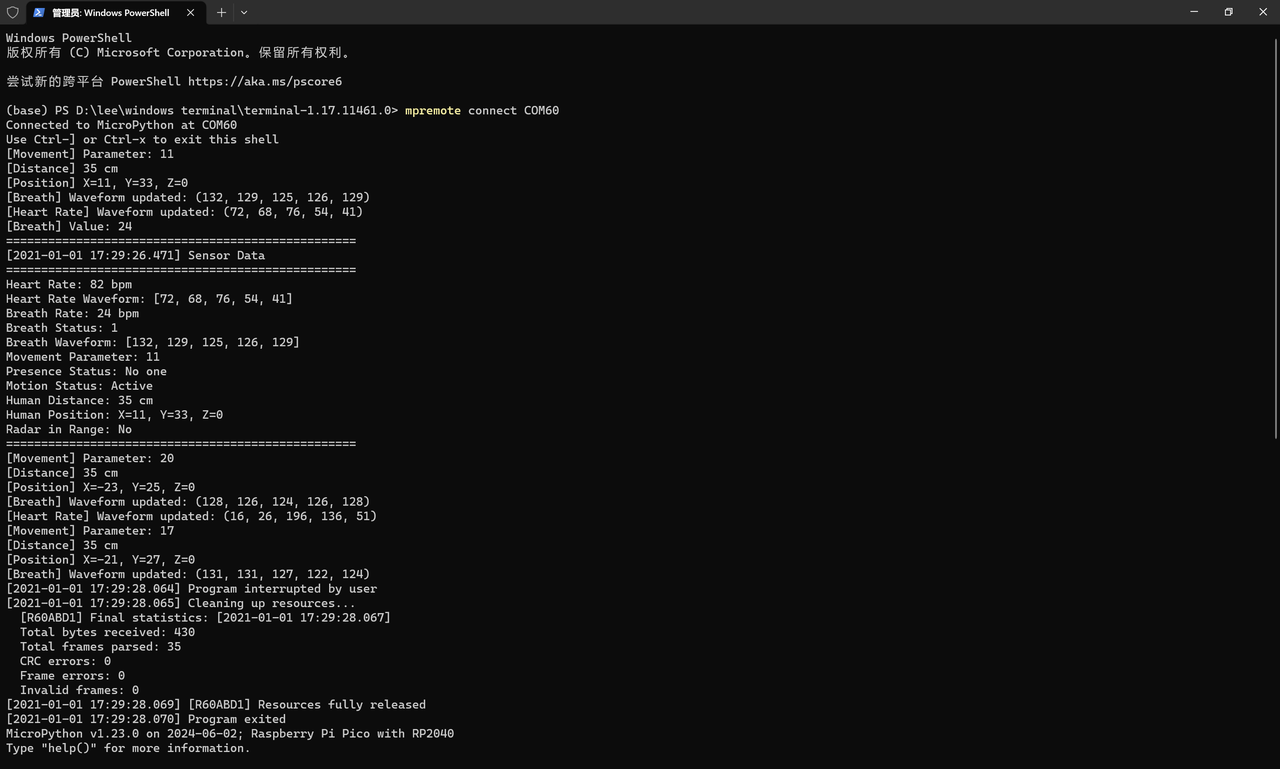
燒錄代碼,打開終端:
可以看到 update_properties_from_frame 函數對單幀數據來説,耗時 1.2ms 左右,時間上是充沛的。
接下來,我們開始將 update_properties_from_frame 函數放到 R60ABD1 類中,代碼如下:
def update_properties_from_frame(self, frame):
_"""_
_ 根據解析的幀更新屬性值_
_ Args:_
_ frame: DataFlowProcessor解析後的幀數據字典_
_ """_
_ _control = frame['control_byte']
command = frame['command_byte']
data = frame['data']
# 心跳包 (0x01)
if control == 0x01:
# 心跳包上報
if command == 0x01:
self.heartbeat_last_received = time.ticks_ms()
if R60ABD1.DEBUG_ENABLED:
print("[Heartbeat] Received")
# 系統初始化狀態 (0x05)
elif control == 0x05:
if command == 0x01: # 初始化完成信息
if data and len(data) > 0:
self.system_initialized = (data[0] == 0x01)
self.system_initialized_timestamp = time.ticks_ms()
if R60ABD1.DEBUG_ENABLED:
status = "completed" if self.system_initialized else "not completed"
print(f"[System] Initialization {status}")
# 雷達探測範圍 (0x07)
elif control == 0x07:
if command == 0x07: # 位置越界狀態上報
if data and len(data) > 0:
self.radar_in_range = (data[0] == 0x01)
if R60ABD1.DEBUG_ENABLED:
status = "in range" if self.radar_in_range else "out of range"
print(f"[Radar] {status}")
# 人體存在檢測 (0x80)
elif control == 0x80:
if command == 0x01: # 存在信息
if data and len(data) > 0:
self.presence_status = data[0]
if R60ABD1.DEBUG_ENABLED:
status_text = "No one" if self.presence_status == 0 else "Someone"
print(f"[Presence] {status_text}")
elif command == 0x02: # 運動信息
if data and len(data) > 0:
self.motion_status = data[0]
if R60ABD1.DEBUG_ENABLED:
status_text = ["No motion", "Static", "Active"][
self.motion_status] if self.motion_status < 3 else "Unknown"
print(f"[Motion] {status_text}")
elif command == 0x03: # 體動參數
if data and len(data) > 0:
self.movement_parameter = data[0]
if R60ABD1.DEBUG_ENABLED:
print(f"[Movement] Parameter: {self.movement_parameter}")
elif command == 0x04: # 人體距離
if data and len(data) >= 2:
self.human_distance = (data[0] << 8) | data[1]
if R60ABD1.DEBUG_ENABLED:
print(f"[Distance] {self.human_distance} cm")
elif command == 0x05: # 人體方位
if data and len(data) == 6:
x, y, z = self._parse_human_position_data(data)
self.human_position_x = x
self.human_position_y = y
self.human_position_z = z
if R60ABD1.DEBUG_ENABLED:
print(f"[Position] X={x}, Y={y}, Z={z}")
# 呼吸監測 (0x81)
elif control == 0x81:
if command == 0x01: # 呼吸狀態
if data and len(data) > 0:
self.breath_status = data[0]
if R60ABD1.DEBUG_ENABLED:
status_text = ["Normal", "High", "Low", "None"][
self.breath_status - 1] if 1 <= self.breath_status <= 4 else "Unknown"
print(f"[Breath] Status: {status_text}")
elif command == 0x02: # 呼吸數值
if data and len(data) > 0:
self.breath_value = data[0]
if R60ABD1.DEBUG_ENABLED:
print(f"[Breath] Value: {self.breath_value}")
elif command == 0x05: # 呼吸波形
if data and len(data) == 5:
waveform = self._parse_breath_waveform_data(data)
self.breath_waveform = list(waveform)
if R60ABD1.DEBUG_ENABLED:
print(f"[Breath] Waveform updated: {waveform}")
# 心率監測 (0x85)
elif control == 0x85:
if command == 0x02: # 心率數值
if data and len(data) > 0:
self.heart_rate_value = data[0]
if R60ABD1.DEBUG_ENABLED:
print(f"[Heart Rate] Value: {self.heart_rate_value}")
elif command == 0x05: # 心率波形
if data and len(data) == 5:
waveform = self._parse_heart_rate_waveform_data(data)
self.heart_rate_waveform = list(waveform)
if R60ABD1.DEBUG_ENABLED:
print(f"[Heart Rate] Waveform updated: {waveform}")
# 睡眠監測 (0x84)
elif control == 0x84:
if command == 0x01: # 入牀/離牀狀態
if data and len(data) > 0:
self.bed_status = data[0]
if R60ABD1.DEBUG_ENABLED:
status_text = ["Leave bed", "Enter bed", "None"][
self.bed_status] if self.bed_status < 3 else "Unknown"
print(f"[Bed] Status: {status_text}")
elif command == 0x02: # 睡眠狀態
if data and len(data) > 0:
self.sleep_status = data[0]
if R60ABD1.DEBUG_ENABLED:
status_text = ["Deep sleep", "Light sleep", "Awake", "None"][
self.sleep_status] if self.sleep_status < 4 else "Unknown"
print(f"[Sleep] Status: {status_text}")
elif command == 0x03: # 清醒時長
if data and len(data) >= 2:
self.awake_duration = (data[0] << 8) | data[1]
if R60ABD1.DEBUG_ENABLED:
print(f"[Sleep] Awake duration: {self.awake_duration} min")
elif command == 0x04: # 淺睡時長
if data and len(data) >= 2:
self.light_sleep_duration = (data[0] << 8) | data[1]
if R60ABD1.DEBUG_ENABLED:
print(f"[Sleep] Light sleep duration: {self.light_sleep_duration} min")
elif command == 0x05: # 深睡時長
if data and len(data) >= 2:
self.deep_sleep_duration = (data[0] << 8) | data[1]
if R60ABD1.DEBUG_ENABLED:
print(f"[Sleep] Deep sleep duration: {self.deep_sleep_duration} min")
elif command == 0x06: # 睡眠質量評分
if data and len(data) > 0:
self.sleep_quality_score = data[0]
if R60ABD1.DEBUG_ENABLED:
print(f"[Sleep] Quality score: {self.sleep_quality_score}")
elif command == 0x0C: # 睡眠綜合狀態
if data and len(data) == 8:
comprehensive_data = self._parse_sleep_comprehensive_data(data)
# 更新到字典屬性
self.sleep_comprehensive_status = {
'presence': comprehensive_data[0],
'sleep_status': comprehensive_data[1],
'avg_breath': comprehensive_data[2],
'avg_heart_rate': comprehensive_data[3],
'turnover_count': comprehensive_data[4],
'large_movement_ratio': comprehensive_data[5],
'small_movement_ratio': comprehensive_data[6],
'apnea_count': comprehensive_data[7]
}
if R60ABD1.DEBUG_ENABLED:
print(f"[Sleep] Comprehensive status updated")
elif command == 0x0D: # 睡眠質量分析/統計信息
if data and len(data) == 12:
stats_data = self._parse_sleep_statistics_data(data)
# 更新對應的睡眠統計屬性
self.sleep_quality_score = stats_data[0]
if R60ABD1.DEBUG_ENABLED:
# 注意:stats_data[1]是總睡眠時長,需要根據實際情況決定如何分配
print(f"[Sleep] Statistics updated")
elif command == 0x0E: # 睡眠異常
if data and len(data) > 0:
self.sleep_anomaly = data[0]
if R60ABD1.DEBUG_ENABLED:
status_text = ["Short sleep (<4h)", "Long sleep (>12h)", "No person anomaly", "Normal"][
self.sleep_anomaly] if self.sleep_anomaly < 4 else "Unknown"
print(f"[Sleep] Anomaly: {status_text}")
elif command == 0x10: # 睡眠質量評級
if data and len(data) > 0:
self.sleep_quality_rating = data[0]
if R60ABD1.DEBUG_ENABLED:
status_text = ["None", "Good", "Normal", "Poor"][
self.sleep_quality_rating] if self.sleep_quality_rating < 4 else "Unknown"
print(f"[Sleep] Quality rating: {status_text}")
elif command == 0x11: # 異常掙扎狀態
if data and len(data) > 0:
self.abnormal_struggle_status = data[0]
if R60ABD1.DEBUG_ENABLED:
status_text = ["None", "Normal", "Abnormal"][
self.abnormal_struggle_status] if self.abnormal_struggle_status < 3 else "Unknown"
print(f"[Sleep] Struggle status: {status_text}")
elif command == 0x12: # 無人計時狀態
if data and len(data) > 0:
self.no_person_timing_status = data[0]
if R60ABD1.DEBUG_ENABLED:
status_text = ["None", "Normal", "Abnormal"][
self.no_person_timing_status] if self.no_person_timing_status < 3 else "Unknown"
print(f"[Sleep] No person timing: {status_text}")
接下來,我們修改一下 main.py:
# Python env :
# -*- coding: utf-8 -*-
# @Time : 2025/11/4 下午5:33
# @Author : 李清水
# @File : main.py
# @Description :
from machine import UART, Pin, Timer
import time
from data_flow_processor import DataFlowProcessor
from r60abd1 import R60ABD1, format_time
# 初始化UART0:TX=16, RX=17,波特率115200
uart = UART(0, baudrate=115200, tx=Pin(16), rx=Pin(17), timeout=0)
# 創建DataFlowProcessor實例
processor = DataFlowProcessor(uart)
# 創建R60ABD1實例
device = R60ABD1(processor, parse_interval=50)
# ======================================== 功能函數 ============================================
def print_sensor_data():
_"""打印傳感器數據到Thonny控制枱"""_
_ _print("=" * 50)
print("%s Sensor Data" % format_time())
print("=" * 50)
# 心率數據
print("Heart Rate: %d bpm" % device.heart_rate_value)
print("Heart Rate Waveform: %s" % str(device.heart_rate_waveform))
# 呼吸數據
print("Breath Rate: %d bpm" % device.breath_value)
print("Breath Status: %d" % device.breath_status)
print("Breath Waveform: %s" % str(device.breath_waveform))
# 人體存在數據
print("Movement Parameter: %d" % device.movement_parameter)
print("Presence Status: %s" % ("Someone" if device.presence_status == 1 else "No one"))
print("Motion Status: %s" % ["No motion", "Static", "Active"][
device.motion_status] if device.motion_status < 3 else "Unknown")
# 距離和位置
print("Human Distance: %d cm" % device.human_distance)
print("Human Position: X=%d, Y=%d, Z=%d" % (
device.human_position_x, device.human_position_y, device.human_position_z))
# 雷達狀態
print("Radar in Range: %s" % ("Yes" if device.radar_in_range else "No"))
print("=" * 50)
# ======================================== 主程序 ============================================
# 上次打印時間
last_print_time = time.ticks_ms()
print_interval = 2000 # 2秒打印一次
try:
while True:
current_time = time.ticks_ms()
# 定期打印傳感器數據
if time.ticks_diff(current_time, last_print_time) >= print_interval:
print_sensor_data()
last_print_time = current_time
# 小延遲,避免佔用太多CPU
time.sleep_ms(10)
except KeyboardInterrupt:
print("%s Program interrupted by user" % format_time())
finally:
# 清理資源
print("%s Cleaning up resources..." % format_time())
device.close()
print("%s Program exited" % format_time())
運行時發現可以正常解析,同時中斷代碼時也可以:
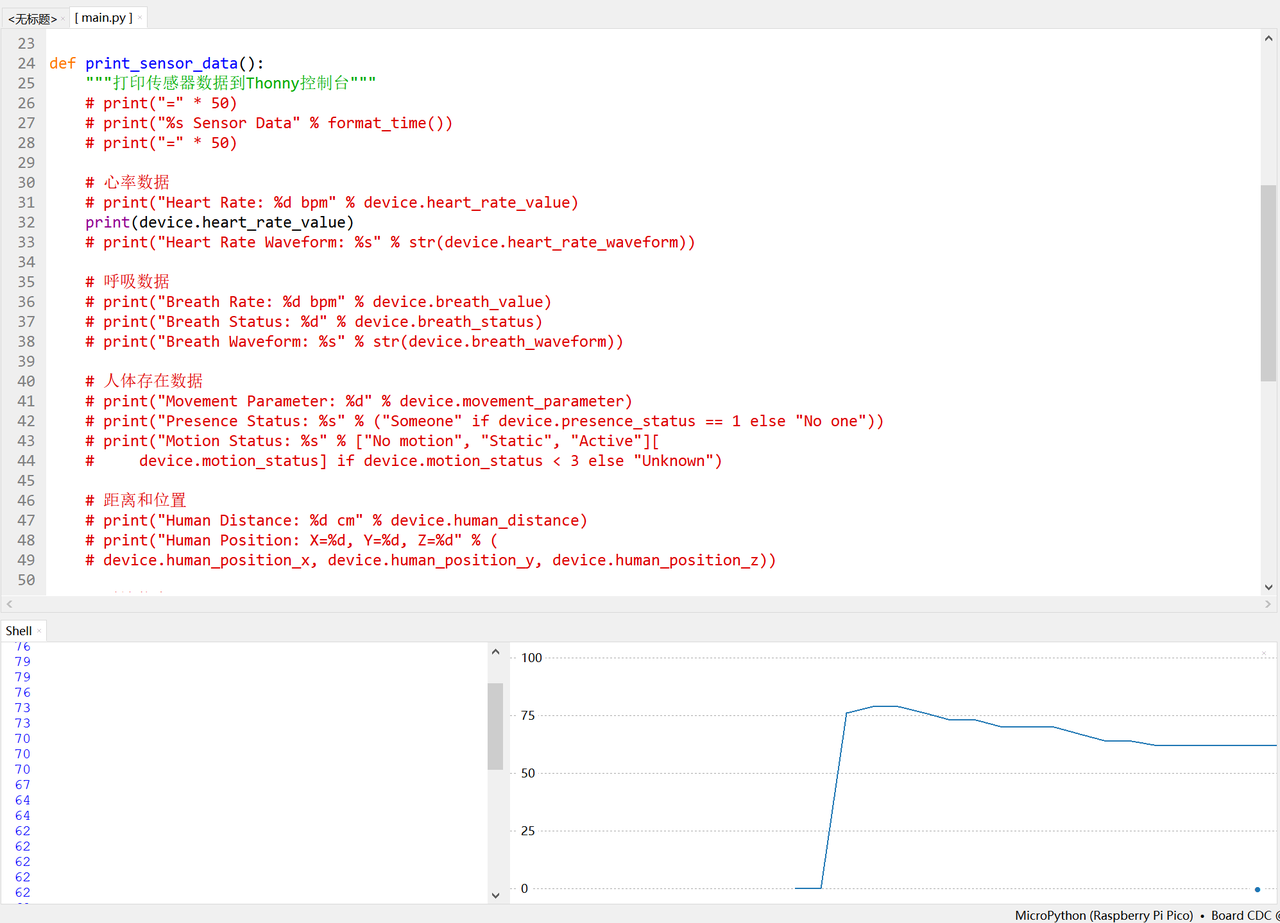
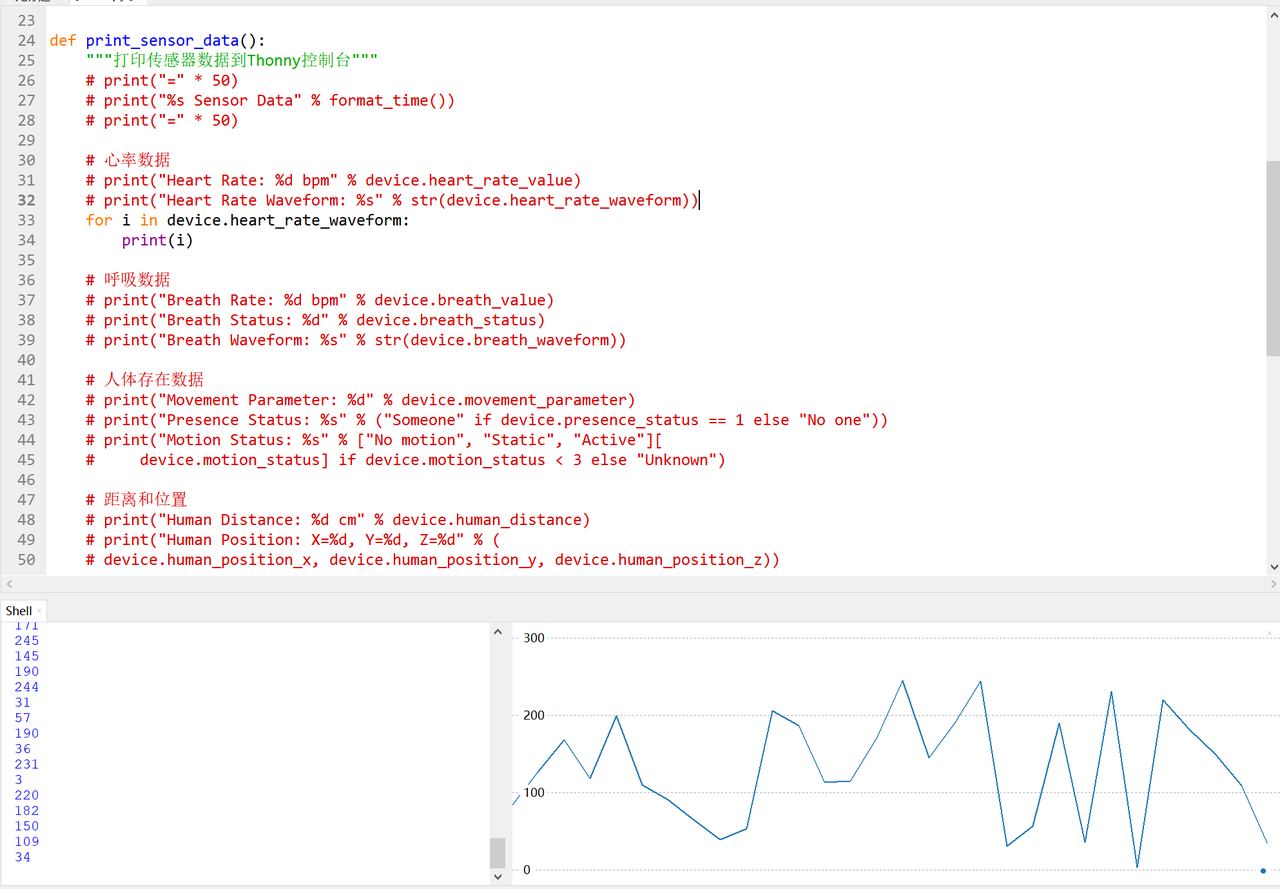
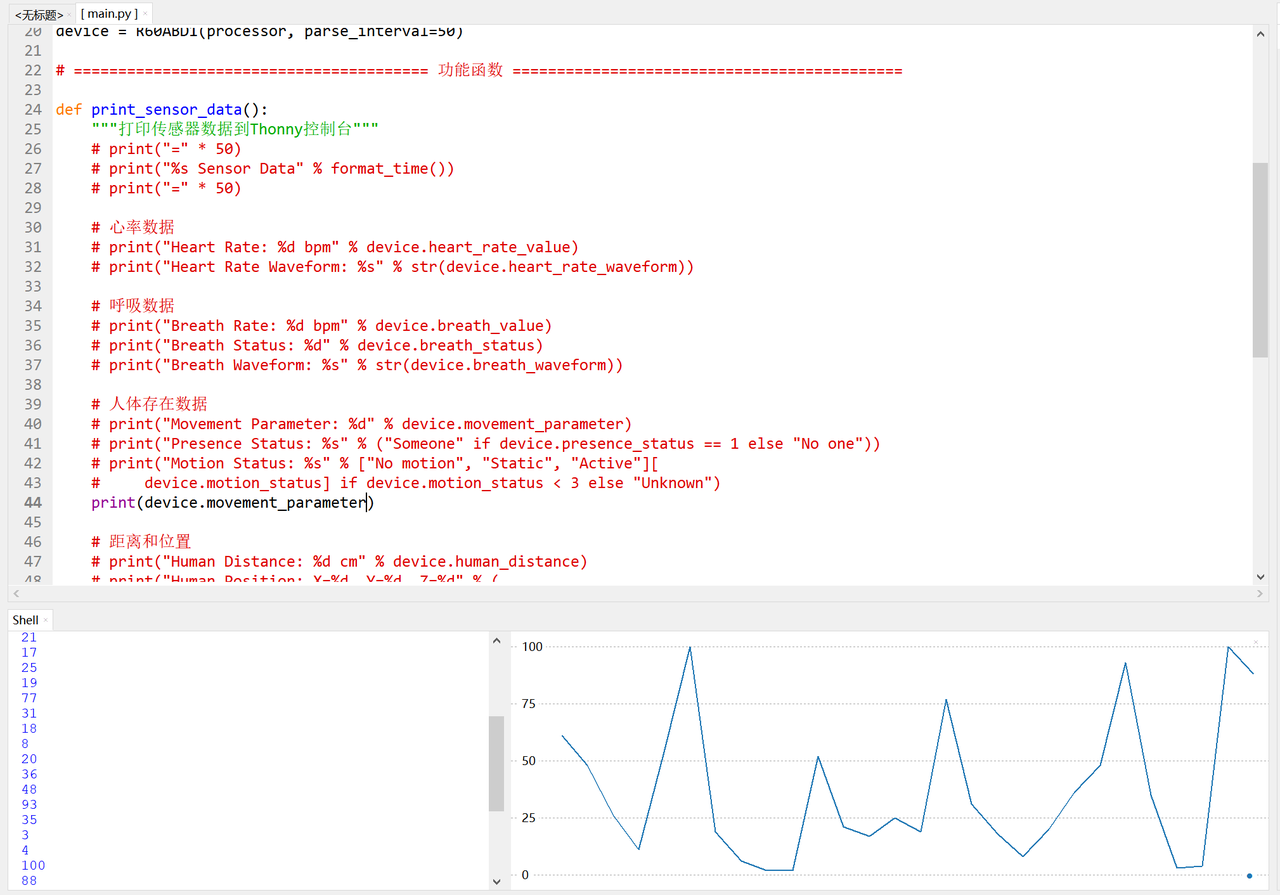
3.3.5.5 實際運行驗證:數據一致性與可視化
接下來,我們在 thonny 中看一下值的變化曲線(此時需要設置 DEBUG_ENABLED = False):
同時,需要注意,這裏,我們一次只輸出一類數值便於查看:
3.3.6 命令響應邏輯設計與實現:主動查詢/設置/使能指令交互處理
在 R60ABD1 類的業務邏輯層中,命令響應邏輯負責處理 “主動發起指令 → 接收設備響應 → 更新屬性 / 返回結果” 的交互流程,是實現 “設備控制、信息查詢、參數配置” 等功能的核心模塊。
3.3.6.1 設計目標與核心思路
解決的業務場景:
- 設備信息查詢: 如獲取產品型號、固件版本、硬件型號等;
- 功能開關控制: 如開啓 / 關閉人體存在監測、呼吸監測、心率監測等;
- 參數動態配置: 如設置低緩呼吸閾值、無人計時時長、掙扎靈敏度等;
- 設備狀態診斷: 如查詢心跳包狀態、初始化完成狀態、雷達探測範圍等。
核心設計思路:
- 狀態機模式管理查詢生命週期:通過
_query_in_progress、_query_response_received等屬性,跟蹤 發起查詢 → 等待響應 → 處理結果 → 清理狀態 的完整流程; - 複用解析邏輯:查詢響應幀與主動上報幀的結構完全一致,因此複用
update_properties_from_frame方法進行解析,避免代碼冗餘; - 硬件 FIFO 保障數據可靠性:樹莓派 Pico 的 UART 硬件 FIFO(32 字節)自動緩存響應數據,結合定時器回調的
read_and_parse方法,確保數據無丟失; - 超時重試機制:通過
max_retries和retry_delay參數,應對串口通信的不穩定場景,提升指令執行的可靠性。
3.3.6.2 返回參數設計規範:基於設備響應的 “狀態 + 結果” 二元組模式
命令響應邏輯的返回參數設計需嚴格遵循 “響應成功狀態 + 實際結果” 的二元組規範,且 “是否成功”“返回值內容”“屬性是否更新” 均需以設備返回的真實響應為唯一判斷依據 —— 不得通過 “指令發送成功”“本地邏輯預判” 等非設備響應信息推導結果,確保返回數據與設備真實狀態完全一致。
3.3.6.2.1 返回參數的統一格式要求
所有主動指令交互方法(查詢、設置、控制類)的返回值必須為二元組 (success: bool, result: Any),各字段定義如下:
- success:布爾值,True 表示收到設備有效響應並完成解析(響應幀格式合法、控制字 / 命令字與指令匹配),False 表示超時、響應不匹配、解析失敗等異常場景;
- result:動態類型,根據指令類型返回對應結果:
- 查詢類指令(如query_human_distance):返回解析後的設備數據(如距離值、開關狀態、產品型號字符串);
- 控制類指令(如enable_human_presence):返回設備響應確認的 “控制是否生效” 布爾值;
- 配置類指令(如set_low_breath_threshold):返回設備響應中確認的配置後參數值;
- 異常場景:result 為 None。
3.3.6.2.2 核心判斷依據:設備響應是唯一數據源
無論是 success 的布爾狀態、result 的實際值,還是業務屬性的更新,均需嚴格基於設備返回的響應幀數據判斷,禁止任何本地邏輯預判:
| 判斷維度 | 正確判斷依據(基於設備響應) | 錯誤判斷依據(本地預判) |
|---|---|---|
success 是否為真 |
1. 收到完整響應幀;2. 響應幀控制字/命令字與發送指令匹配;3. 響應數據格式合法(長度、CRC校驗通過) | 1. 指令發送成功(uart.write返回字節數正常);2. 未收到響應但假設設備已執行;3. 本地邏輯推導“應該成功” |
result 結果值 |
從設備響應數據中直接解析(如距離從響應字節中計算、開關狀態從響應位中提取) | 本地預設固定值(如控制類指令直接返回True、查詢類指令返回默認值) |
| 屬性是否更新 | 響應解析後同步更新屬性(如human_distance = 解析後的距離值) |
指令發送成功後直接修改屬性(如presence_enabled = True) |
3.3.6.2.3 不同類型指令的返回參數示例
- 查詢類指令:返回 “解析後的設備數據”
以 query_human_distance 為例,返回值嚴格基於設備響應解析,無響應則 success=False、result=None:
def query_human_distance(self, timeout=200):
"""查詢人體距離(遵循“狀態+結果”二元組規範)"""
return self._execute_operation(R60ABD1.TYPE_QUERY_HUMAN_DISTANCE, timeout=timeout)
# 實際執行邏輯(_execute_operation內部):
# 1. 發送查詢指令後,等待設備響應
# 2. 若收到響應:
# - 校驗控制字(0x80)、命令字(0x84)與指令匹配
# - 從響應數據中解析距離值((data[0] << 8) | data[1])
# - 返回 (True, 解析後的距離值),同時更新self.human_distance
# 3. 若超時/響應不匹配:
# - 返回 (False, None),不修改任何屬性
- 控制類指令:返回 “設備確認的生效狀態”
以 enable_human_presence 為例,result 並非本地預設的 True,而是從設備響應中提取的 “開關是否生效” 狀態:
def enable_human_presence(self, timeout=200):
"""打開人體存在功能(遵循“狀態+結果”二元組規範)"""
return self._execute_operation(R60ABD1.TYPE_CONTROL_HUMAN_PRESENCE_ON, timeout=timeout)
# 實際執行邏輯:
# 1. 發送控制指令後,等待設備響應
# 2. 若收到響應:
# - 校驗控制字(0x80)、命令字(0x00)與指令匹配
# - 從響應數據中解析開關狀態(data[0] == 0x01 表示生效)
# - 返回 (True, True),同時更新self.presence_enabled = True
# 3. 若設備響應“未生效”(data[0] == 0x00):
# - 返回 (True, False),self.presence_enabled = False
# 4. 若超時/響應異常:
# - 返回 (False, None),不修改屬性
- 配置類指令:返回 “設備確認的配置參數”
以 set_low_breath_threshold 為例,result 是設備響應中確認的配置後閾值,確保配置已實際生效:
def set_low_breath_threshold(self, threshold, timeout=200):
"""設置低緩呼吸閾值(遵循“狀態+結果”二元組規範)"""
# 傳入自定義配置數據,發送指令
return self._execute_operation(
R60ABD1.TYPE_SET_LOW_BREATH_THRESHOLD,
data=bytes([threshold]),
timeout=timeout
)
# 實際執行邏輯:
# 1. 發送配置指令(攜帶自定義閾值)後,等待設備響應
# 2. 若收到響應:
# - 校驗控制字(0x81)、命令字(0x0B)與指令匹配
# - 從響應數據中解析確認的閾值(data[0])
# - 返回 (True, 確認後的閾值),同時更新self.low_breath_threshold
# 3. 若設備響應的閾值與發送值不一致:
# - 返回 (True, 設備實際配置的閾值),同步更新屬性為設備確認值
# 4. 若超時/響應異常:
# - 返回 (False, None),不修改屬性
3.3.6.2.4 簡要概述
- 一致性:所有命令響應方法返回格式統一,上層調用無需適配不同類型指令的返回邏輯(如統一通過
success判斷是否有效,result提取具體結果); - 可靠性:基於設備響應的唯一判斷依據,避免 “指令發送成功但設備未執行”“本地狀態與設備狀態不一致” 等隱蔽問題;
- 可調試性:通過
success狀態快速定位 “指令未響應”“響應不匹配” 等問題,通過result直接獲取設備真實反饋,便於問題排查; - 兼容性:統一格式為後續功能擴展(如批量指令執行、異常重試機制)提供標準化接口,降低上層系統集成成本。
3.3.6.3 阻塞式查詢方法實現:以存在信息查詢為例
在 R60ABD1 類中添加以下屬性,用於跟蹤查詢的生命週期:
class R60ABD1:
def __init__(self, data_processor, **kwargs):
# ... 其他屬性初始化 ...
# 查詢狀態管理
self._query_in_progress = False # 是否有查詢在進行中
self._query_response_received = False # 是否收到響應
self._query_result = None # 查詢結果
self._current_query_type = None # 當前查詢類型
self._query_timeout = 200 # 默認查詢超時時間(ms)
接下來,我們以存在信息查詢為例,説明阻塞式查詢方法的設計與實現:
def query_presence_status(self, timeout=200):
"""
查詢存在信息狀態(阻塞式)
Args:
timeout: 超時時間,單位毫秒
Returns:
tuple: (查詢狀態, 存在狀態信息)
- 查詢狀態: True-查詢成功, False-查詢失敗
- 存在狀態信息: 0-無人, 1-有人 (查詢成功時有效)
"""
if self._query_in_progress:
if R60ABD1.DEBUG_ENABLED:
print("[Query] Another query in progress, aborting")
return False, None
try:
original_running = self._is_running
self._is_running = False # 臨時禁用定時器,避免數據競爭
# 初始化查詢狀態
self._query_in_progress = True
self._query_response_received = False
self._query_result = None
self._current_query_type = R60ABD1.TYPE_QUERY_HUMAN_EXISTENCE_INFO
# 構造查詢指令幀
header = bytes([0x53, 0x59])
control = bytes([0x80])
command = bytes([0x81])
length = bytes([0x00, 0x01])
data = bytes([0x0F])
crc_data = header + control + command + length + data
crc = self._calculate_crc(crc_data)
query_frame = crc_data + bytes([crc]) + bytes([0x54, 0x43])
# 發送指令
self.data_processor.uart.write(query_frame)
if R60ABD1.DEBUG_ENABLED:
print(f"[Query] Presence status query sent: {query_frame.hex()}")
# 等待響應
start_time = time.ticks_ms()
while not self._query_response_received:
if time.ticks_diff(time.ticks_ms(), start_time) >= timeout:
if R60ABD1.DEBUG_ENABLED:
print("[Query] Presence status query timeout")
return False, None
time.sleep_us(100) # 微秒級延遲,避免CPU佔用
frames = self.data_processor.read_and_parse()
for frame in frames:
self.update_properties_from_frame(frame)
return True, self._query_result
except Exception as e:
if R60ABD1.DEBUG_ENABLED:
print(f"[Query] Presence status query error: {e}")
return False, None
finally:
# 清理查詢狀態並恢復定時器
self._query_in_progress = False
self._query_response_received = False
self._query_result = None
self._current_query_type = None
try:
self._is_running = original_running
except NameError:
pass
基於相同設計思路,可擴展心跳查詢、產品信息查詢、初始化狀態查詢等方法,例如:
def query_heartbeat(self, timeout=200):
"""查詢心跳包狀態(阻塞式)"""
# 邏輯與query_presence_status一致,僅指令類型和解析邏輯不同
...
def query_product_model(self, timeout=200):
"""查詢產品型號(阻塞式)"""
...
3.3.6.4 update_properties_from_frame 的響應幀處理擴展
在原有主動上報解析邏輯中,添加查詢響應幀的識別與處理分支,確保屬性更新與查詢結果同步:
def update_properties_from_frame(self, frame):
control = frame['control_byte']
command = frame['command_byte']
data = frame['data']
# ... 原有主動上報幀處理邏輯(系統、存在、呼吸、心率等)...
# 人體存在檢測(查詢響應分支)
elif control == 0x80 and command == 0x81:
if data and len(data) > 0:
presence_value = data[0]
self.presence_status = presence_value
# 匹配當前查詢類型,更新查詢結果
if (self._query_in_progress and
self._current_query_type == R60ABD1.TYPE_QUERY_HUMAN_EXISTENCE_INFO and
not self._query_response_received):
self._query_result = presence_value
self._query_response_received = True
if R60ABD1.DEBUG_ENABLED:
print(f"[Query] Presence status response: {'Someone' if presence_value else 'No one'}")
通過這種方式,查詢響應幀會同時更新業務屬性和查詢結果,實現 “一次解析,雙重用途”。
整體流程如下表和圖所示:
| 步驟序號 | 操作 / 狀態 | 説明 |
|---|---|---|
| 1 | 檢查查詢衝突 | 若已有查詢在進行(_query_in_progress=True),返回 None,終止流程 |
| 2 | 臨時禁用定時器 | 保存原始運行狀態(original_running),設置_is_running=False 避免競爭 |
| 3 | 初始化查詢狀態 | 設置_query_in_progress=True、_query_response_received=False、_current_query_type="presence",清空_query_result |
| 4 | 構造併發送查詢指令 | 組裝包含 header、control(0x80)、command(0x81)等的幀,計算 CRC 後通過 UART 發送 |
| 5 | 等待響應(循環) | 記錄開始時間,循環等待響應:
- 若超時(超過 timeout 毫秒),返回 None - 短暫延遲(100us)避免佔用 CPU - 解析數據流,調用 update_properties_from_frame 處理幀 |
| 6 | 處理響應幀 | 當收到 control=0x80、command=0x81 的幀(查詢響應):
- 若當前是存在查詢且未收到響應,更新_query_result 為數據值,設置_query_response_received=True |
| 7 | 返回查詢結果 | 響應接收後,退出循環,返回_query_result(0 = 無人,1 = 有人) |
| 8 | 異常處理 | 若過程中發生異常,返回 None |
| 9 | 重置狀態(最終步驟) | 無論成功 / 失敗 / 超時,重置_query_in_progress=False、_query_response_received=False 等,恢復定時器原始狀態 |
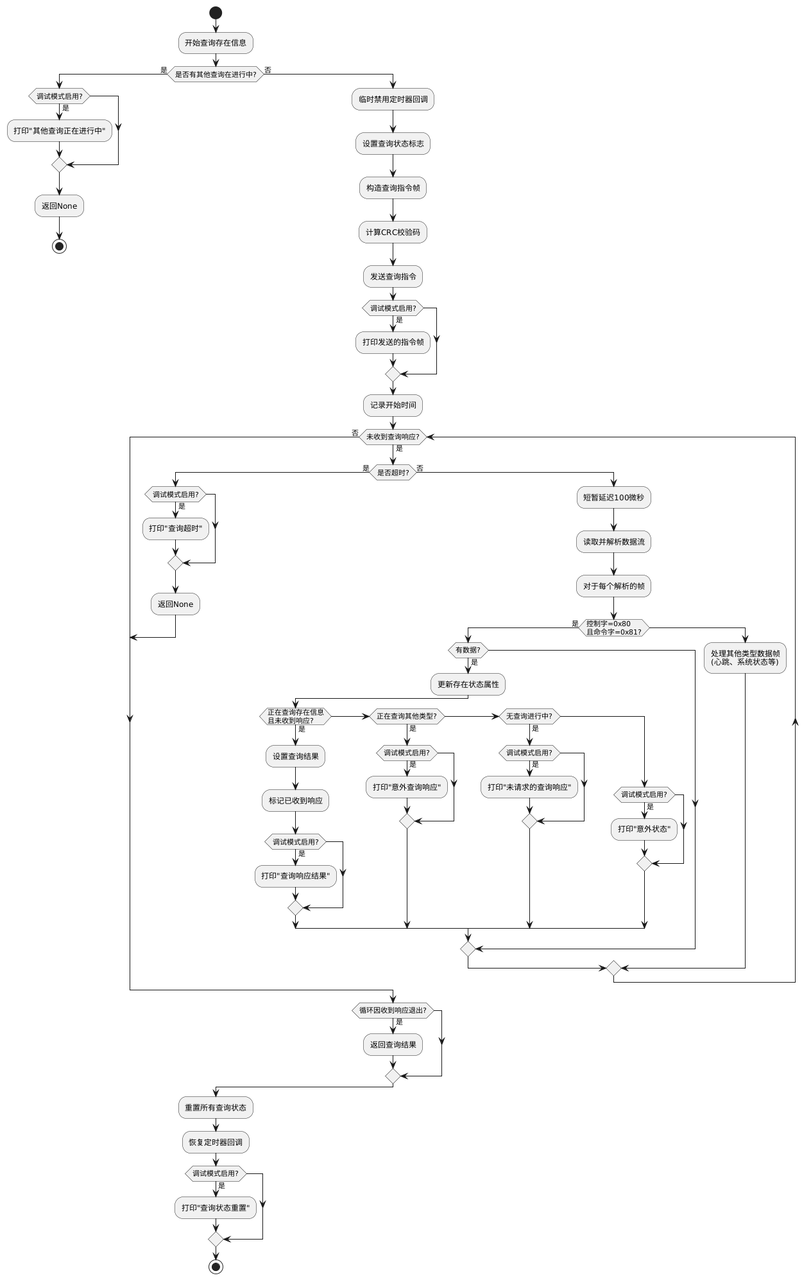
3.3.6.5 測試驗證:查詢與主動上報的兼容性
接下來,我們首先測試一下該方法能不能在沒有任何上報信息時候(除去心跳包外),正常解析:
- 場景 1:關閉主動上報,僅測試查詢功能
- 操作:關閉人體存在、心率、呼吸、睡眠的主動上報功能;
- 測試:在 REPL 中調用
query_presence_status,驗證返回結果與設備實際狀態(有人 / 無人)一致。
- 場景 2:開啓主動上報,驗證查詢與上報的並行性
- 操作:開啓所有主動上報功能,同時調用查詢方法(如
query_firmware_version); - 測試:觀察
main.py輸出,確認主動上報數據正常解析的同時,查詢指令能返回正確結果(如固件版本字符串)。
- 操作:開啓所有主動上報功能,同時調用查詢方法(如
首先關閉人體存在主動上報、心率監測、呼吸監測和睡眠監測功能:

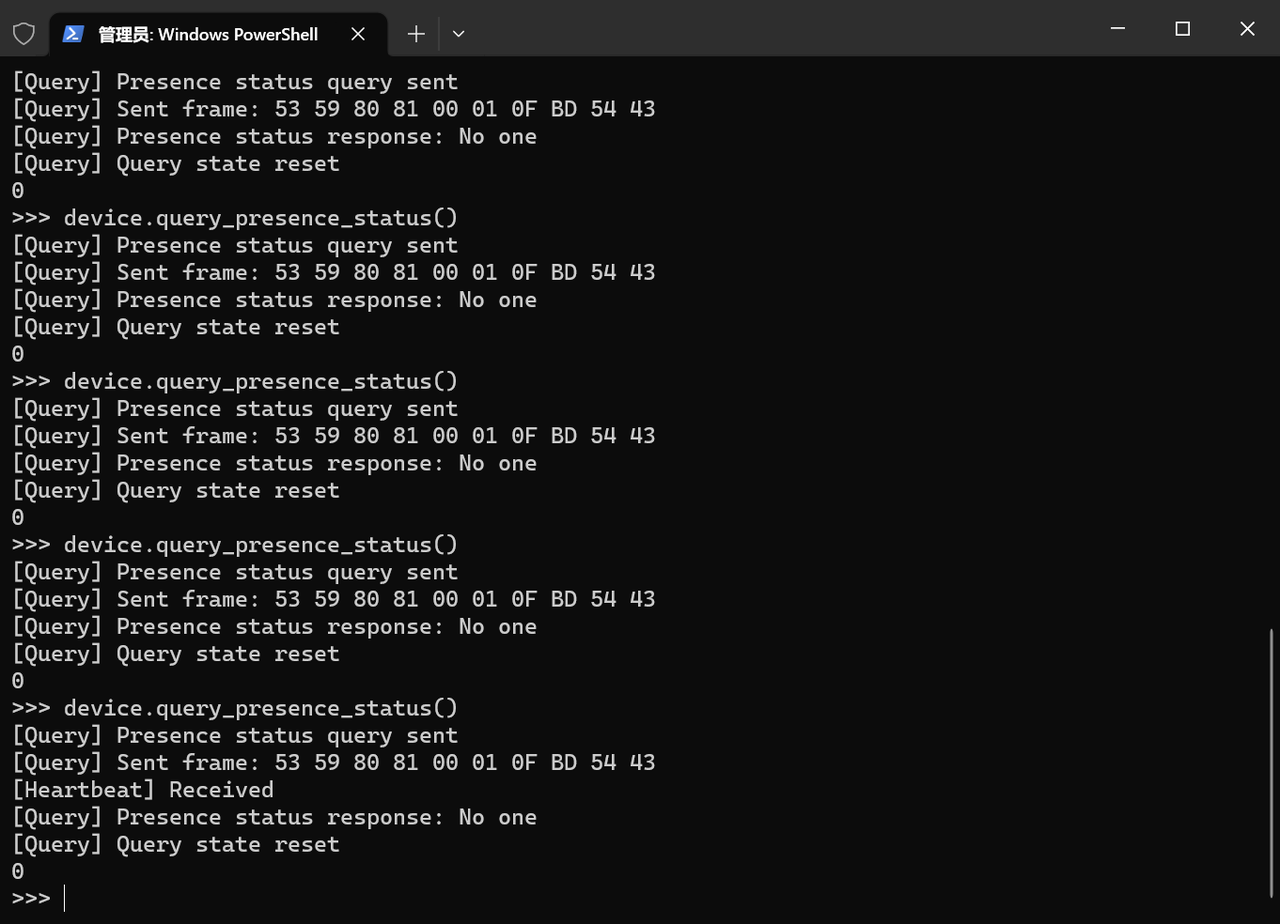
接下來,我們將主動上報數據全部開啓,看看能否正常解析(同時修改 main.py):
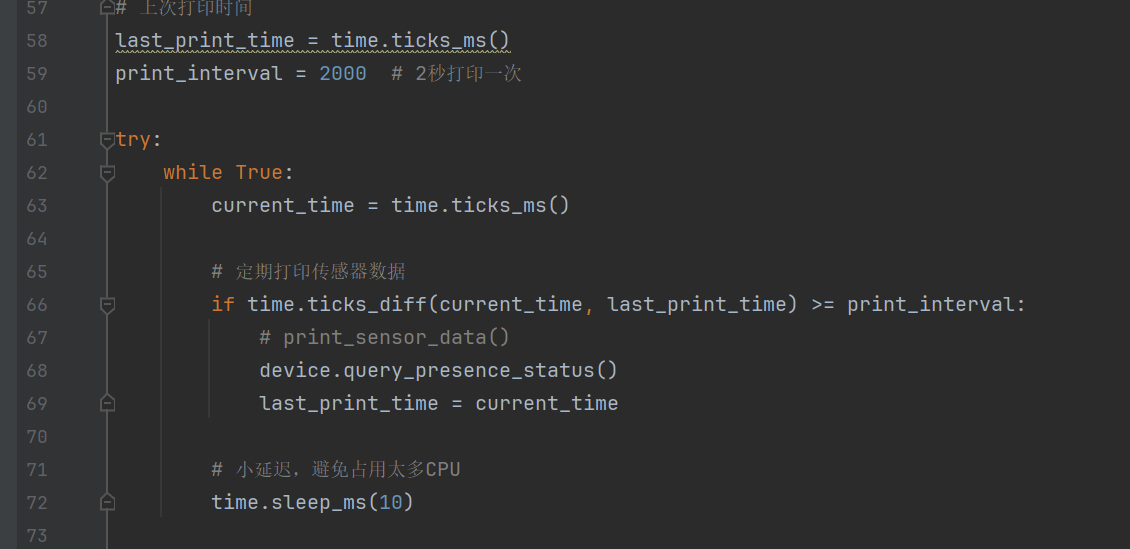
可以看到,正常解析沒有問題:
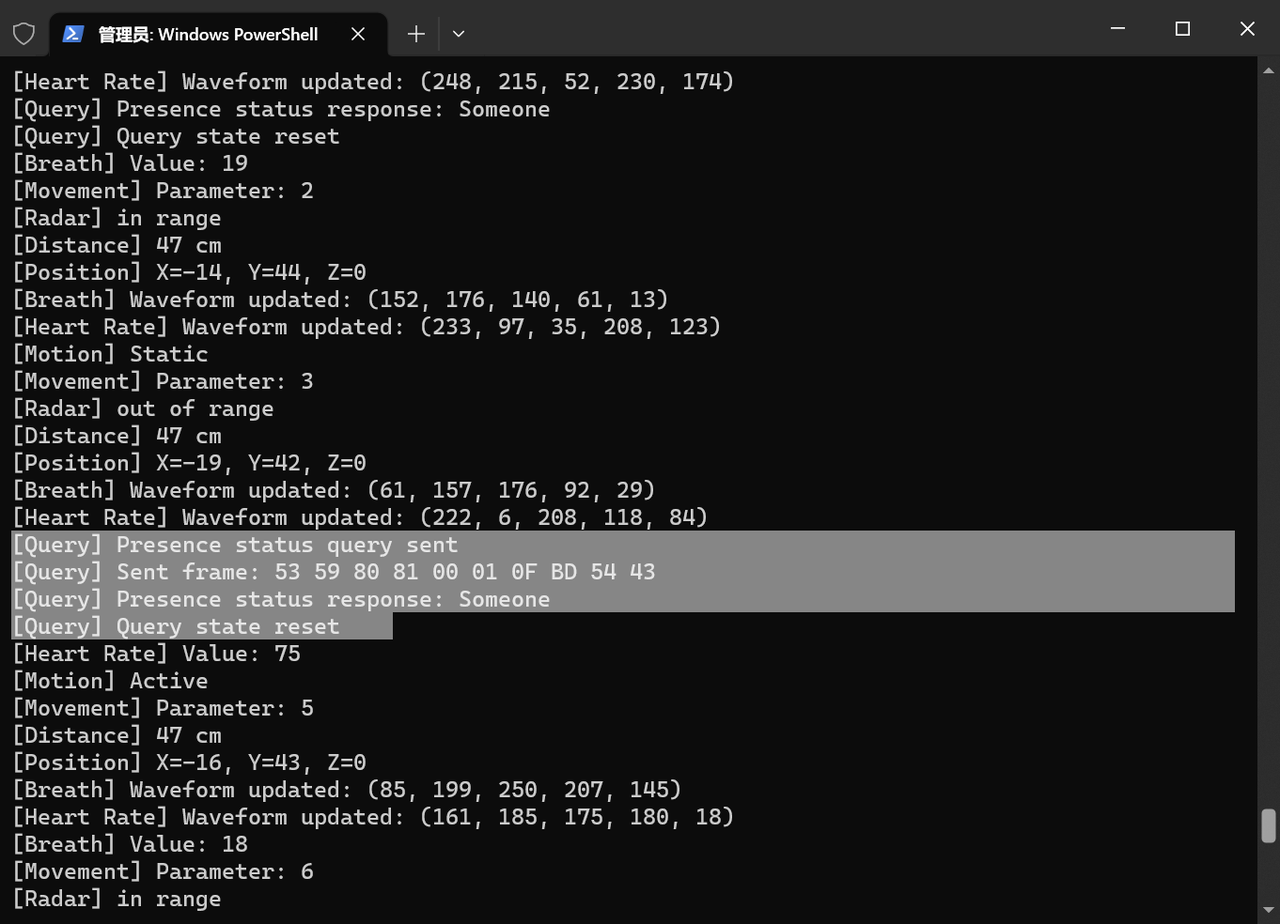
我們取消調試屬性,重新燒錄代碼,並且提前按下 ctrl+c 退出主循環,在 REPL 中測試結果如下:
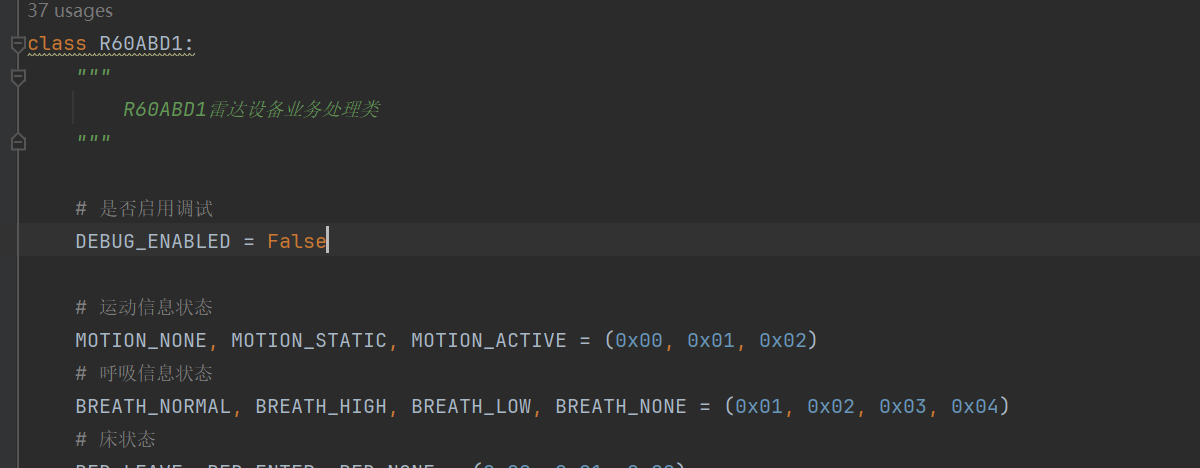
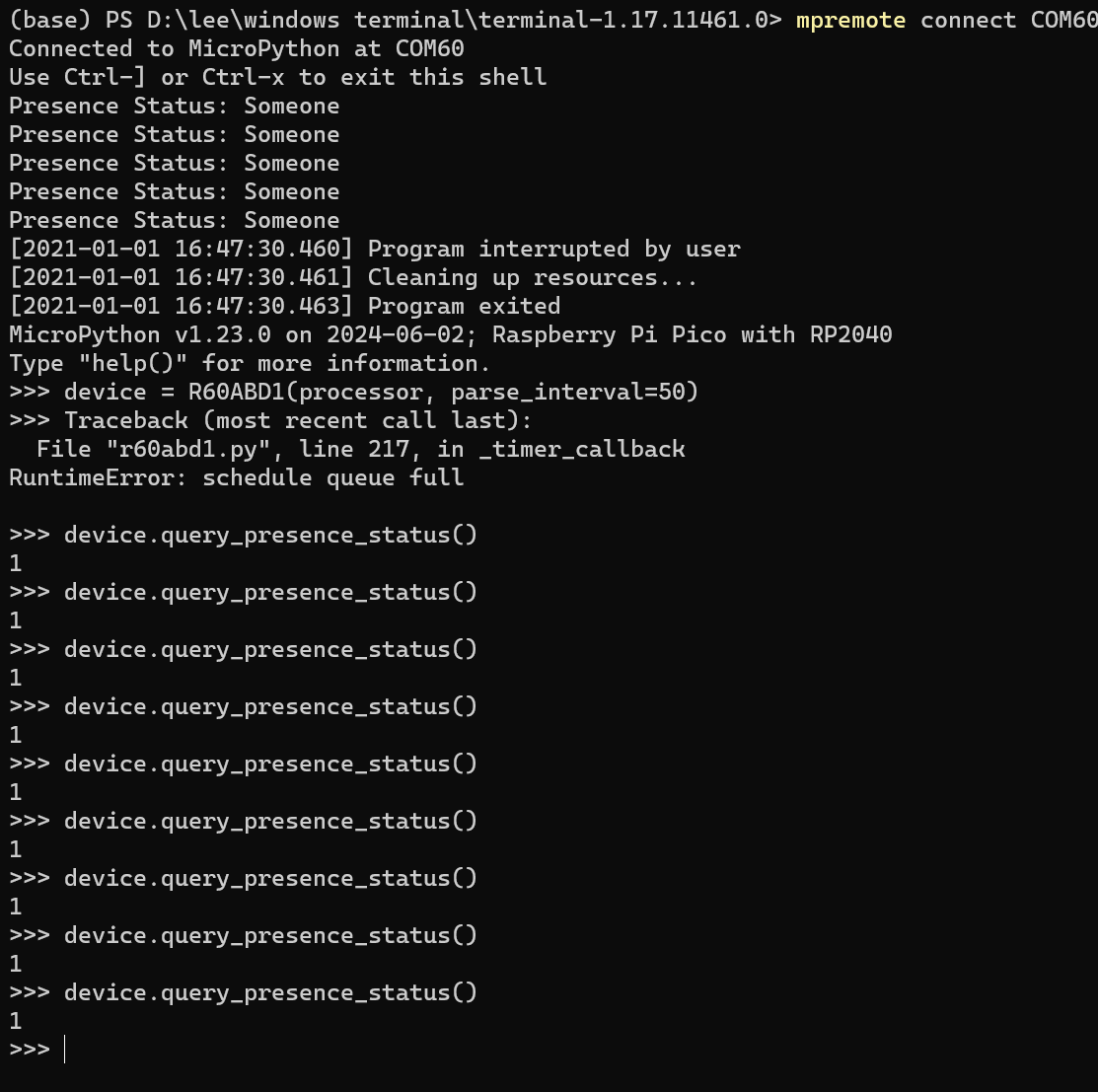
3.3.6.6 類屬性常量的設計:協議與業務的映射橋樑
在 R60ABD1 類中,大量類屬性(如 TYPE_QUERY_HEARTBEAT、MOTION_STATIC 等)並非憑空定義,而是對設備通信協議的抽象與封裝。這些常量是連接 “底層協議數值” 與 “上層業務邏輯” 的關鍵橋樑,其設計目的是解決嵌入式設備通信中 “協議數值可讀性差、業務邏輯與硬件耦合緊” 的核心問題:
常量的來源:設備協議的 “翻譯”
- 毫米波雷達模塊的通信協議(如幀結構、狀態值、指令類型)通常以十六進制數值定義(如0x01表示 “有人”,0x80表示 “存在信息查詢指令”)。直接在代碼中使用這些數值會導致:
- 可讀性差:if status == 0x01無法直觀表達 “有人狀態”;
- 可維護性低:協議更新時需全局修改所有硬編碼數值;
- 易錯性高:數值重複或混淆可能導致邏輯錯誤。
- 因此,類屬性常量的本質是將協議中的數值 “翻譯” 為人類可讀的標識符。例如:
- 協議中0x00表示 “無運動”,映射為MOTION_NONE;
- 協議中0x81表示 “存在信息查詢指令”,映射為TYPE_QUERY_HUMAN_EXISTENCE_INFO。
常量的分類與設計邏輯
根據功能,類屬性常量可分為兩類,均嚴格遵循 “與協議一一對應” 的原則:
① 狀態值常量:描述設備的業務狀態,用於定義設備返回的各類狀態(如運動狀態、呼吸狀態、睡眠狀態等)。
# 運動信息狀態:對應協議中0x00-0x02的數值
MOTION_NONE, MOTION_STATIC, MOTION_ACTIVE = (0x00, 0x01, 0x02)
# 呼吸信息狀態:對應協議中0x01-0x04的數值
BREATH_NORMAL, BREATH_HIGH, BREATH_LOW, BREATH_NONE = (0x01, 0x02, 0x03, 0x04)
這些常量直接對應協議中定義的狀態編碼,在update_properties_from_frame方法中用於狀態判斷與文本轉換(如將0x01轉換為 MOTION_STATIC)。
② 指令類型常量:標識主動交互的指令,用於定義所有主動查詢 / 控制指令的類型(如查詢產品型號、開啓心率監測等),例如:
# 基礎指令類型:對應協議中不同的控制字+命令字組合
TYPE_QUERY_HEARTBEAT = 0 # 心跳包查詢指令
TYPE_MODULE_RESET = 1 # 模組復位指令
# 人體存在相關指令:對應協議中0x80控制字下的命令
TYPE_CONTROL_HUMAN_PRESENCE_ON = 8 # 開啓人體存在功能
TYPE_QUERY_HUMAN_EXISTENCE_INFO = 11 # 存在信息查詢
這些常量與_current_query_type配合,在命令響應邏輯中標識當前查詢的類型,確保update_properties_from_frame能準確匹配響應幀並更新_query_result。
常量的核心價值如下:
- 解耦業務與硬件:通過常量隔離協議細節,業務邏輯無需直接處理十六進制數值,降低對硬件協議的依賴;
- 提升代碼可維護性:協議更新時,只需修改常量與數值的映射關係,無需調整業務邏輯代碼;
- 增強可讀性與協作效率:
if status == MOTION_STATIC比if status == 0x01更直觀,便於團隊協作與後期調試; - 減少錯誤:避免硬編碼數值導致的筆誤(如將
0x0F誤寫為0xF0),通過常量名的唯一性保障邏輯正確性。
3.3.6.7 基礎指令類查詢方法的擴展與驗證
在命令響應邏輯的整體框架下,針對心跳監測、模組復位、產品信息查詢、系統初始化檢測、雷達範圍診斷等基礎指令場景,我們擴展了一系列查詢方法。這些方法遵循 “狀態管理 → 指令構造 → 響應等待 → 屬性更新” 的統一流程,並通過 update_properties_from_frame 實現響應幀與業務屬性的聯動,確保設備交互的完整性與可靠性。
所有基礎指令查詢方法均基於 query_presence_status 的架構擴展,核心差異體現在指令類型(控制字 + 命令字)、響應解析邏輯、屬性更新目標三個維度:
| 方法名 | 指令類型 | 響應解析邏輯 | 屬性更新目標 |
|---|---|---|---|
| query_heartbeat | 0x01+0x80 | 心跳包狀態直接判斷 | heartbeat_last_received |
| reset_module | 0x01+0x02 | 設備原樣返回指令作為確認 | module_reset_flag、module_reset_timestamp |
| query_product_model | 0x02+0xA1 | 調用_parse_product_info_data解析字符串 | product_model |
| query_firmware_version | 0x02+0xA4 | 調用_parse_firmware_version_data解析字符串 | firmware_version |
| query_init_complete | 0x05+0x81 | 解析初始化完成標識(0x01為完成) | system_initialized |
| query_radar_range_boundary | 0x07+0x87 | 解析越界標識(0x01為越界) | radar_in_range(越界則為False) |
以 query_heartbeat 為例,其核心邏輯為 “構造心跳查詢指令 → 等待響應 → 更新心跳時間戳與查詢結果”,通過狀態管理避免併發查詢,確保指令執行的原子性:
def query_heartbeat(self, timeout=200):
if self._query_in_progress:
return False, None
try:
# 狀態初始化與指令構造
self._query_in_progress = True
query_frame = bytes([0x53, 0x59, 0x01, 0x80, 0x00, 0x01, 0x0F, ...]) # 完整幀構造
self.data_processor.uart.write(query_frame)
# 響應等待與屬性更新(通過update_properties_from_frame實現)
start_time = time.ticks_ms()
while not self._query_response_received:
if time.ticks_diff(time.ticks_ms(), start_time) >= timeout:
return False, None
time.sleep_us(100)
frames = self.data_processor.read_and_parse()
for frame in frames:
self.update_properties_from_frame(frame)
return True, self._query_result
finally:
# 狀態清理
self._query_in_progress = False
為支持基礎指令的查詢響應,需在 update_properties_from_frame 中添加指令類型匹配與屬性更新分支。以 “心跳查詢響應” 和 “產品型號查詢響應” 為例,實現 “響應幀 → 屬性 → 查詢結果” 的聯動:
def update_properties_from_frame(self, frame):
control = frame['control_byte']
command = frame['command_byte']
data = frame['data']
# 心跳查詢響應:更新心跳時間戳與查詢結果
if control == 0x01 and command == 0x80:
self.heartbeat_last_received = time.ticks_ms()
if self._query_in_progress and self._current_query_type == self.TYPE_QUERY_HEARTBEAT:
self._query_result = True
self._query_response_received = True
# 產品型號查詢響應:解析字符串並更新產品型號屬性
elif control == 0x02 and command == 0xA1:
product_info = self._parse_product_info_data(data)[0]
self.product_model = product_info
if self._query_in_progress and self._current_query_type == self.TYPE_QUERY_PRODUCT_MODEL:
self._query_result = product_info
self._query_response_received = True
# ... 其他指令響應分支同理擴展 ...
目前 R60ABD1 類的完整代碼如下所示:
# Python env :
# -*- coding: utf-8 -*-
# @Time : 2025/11/4 下午5:35
# @Author : 李清水
# @File : r60abd1.py
# @Description :
from machine import Timer
import time
import micropython
def format_time():
_"""格式化當前時間為 [YYYY-MM-DD HH:MM:SS.sss] 格式"""_
_ _t = time.localtime()
ms = time.ticks_ms() % 1000
return f"[{t[0]}-{t[1]:02d}-{t[2]:02d} {t[3]:02d}:{t[4]:02d}:{t[5]:02d}.{ms:03d}]"
# 計時裝飾器,用於計算函數運行時間
def timed_function(f: callable, *args: tuple, **kwargs: dict) -> callable:
_"""_
_ 計時裝飾器,用於計算並打印函數/方法運行時間。_
_ Args:_
_ f (callable): 需要傳入的函數/方法_
_ args (tuple): 函數/方法 f 傳入的任意數量的位置參數_
_ kwargs (dict): 函數/方法 f 傳入的任意數量的關鍵字參數_
_ Returns:_
_ callable: 返回計時後的函數_
_ """_
_ _myname = str(f).split(' ')[1]
def new_func(*args: tuple, **kwargs: dict) -> any:
t: int = time.ticks_us()
result = f(*args, **kwargs)
delta: int = time.ticks_diff(time.ticks_us(), t)
print('Function {} Time = {:6.3f}ms'.format(myname, delta / 1000))
return result
return new_func
class R60ABD1:
_"""_
_ R60ABD1雷達設備業務處理類_
_ """_
_ _# 是否啓用調試
DEBUG_ENABLED = True
# R60ABD1雷達設備業務處理類中各種狀態值和配置選項的常量
# 運動信息狀態
MOTION_NONE, MOTION_STATIC, MOTION_ACTIVE = (0x00, 0x01, 0x02)
# 呼吸信息狀態
BREATH_NORMAL, BREATH_HIGH, BREATH_LOW, BREATH_NONE = (0x01, 0x02, 0x03, 0x04)
# 牀狀態
BED_LEAVE, BED_ENTER, BED_NONE = (0x00, 0x01, 0x02)
# 睡眠狀態
SLEEP_DEEP, SLEEP_LIGHT, SLEEP_AWAKE, SLEEP_NONE = (0x00, 0x01, 0x02, 0x03)
# 睡眠異常信息
SLEEP_ANOMALY_NONE, SLEEP_ANOMALY_SHORT, SLEEP_ANOMALY_LONG, SLEEP_ANOMALY_NO_PERSON = (0x03, 0x00, 0x01, 0x02)
# 睡眠質量級別
SLEEP_QUALITY_NONE, SLEEP_QUALITY_GOOD, SLEEP_QUALITY_NORMAL, SLEEP_QUALITY_POOR = (0x00, 0x01, 0x02, 0x03)
# 異常掙扎狀態
STRUGGLE_NONE, STRUGGLE_NORMAL, STRUGGLE_ABNORMAL = (0x00, 0x01, 0x02)
# 無人計時狀態
NO_PERSON_TIMING_NONE, NO_PERSON_TIMING_NORMAL, NO_PERSON_TIMING_ABNORMAL = (0x00, 0x01, 0x02)
# 掙扎狀態判讀靈敏度
SENSITIVITY_LOW, SENSITIVITY_MEDIUM, SENSITIVITY_HIGH = (0x00, 0x01, 0x02)
# R60ABD1雷達設備指令類型常量,用於標識不同的查詢和控制操作
# 基礎指令信息查詢和設置類型
# 心跳包查詢
TYPE_QUERY_HEARTBEAT = 0
# 模組復位指令
TYPE_MODULE_RESET = 1
# 產品型號查詢
TYPE_QUERY_PRODUCT_MODEL = 2
# 產品 ID 查詢
TYPE_QUERY_PRODUCT_ID = 3
# 硬件型號查詢
TYPE_QUERY_HARDWARE_MODEL = 4
# 固件版本查詢
TYPE_QUERY_FIRMWARE_VERSION = 5
# 初始化是否完成查詢
TYPE_QUERY_INIT_COMPLETE = 6
# 雷達探測範圍越界狀態查詢
TYPE_QUERY_RADAR_RANGE_BOUNDARY = 7
# 人體存在指令信息查詢和設置類型
# 打開人體存在功能
TYPE_CONTROL_HUMAN_PRESENCE_ON = 8
# 關閉人體存在功能
TYPE_CONTROL_HUMAN_PRESENCE_OFF = 9
# 查詢人體存在開關狀態
TYPE_QUERY_HUMAN_PRESENCE_SWITCH = 10
# 存在信息查詢
TYPE_QUERY_HUMAN_EXISTENCE_INFO = 11
# 運動信息查詢
TYPE_QUERY_HUMAN_MOTION_INFO = 12
# 體動參數查詢
TYPE_QUERY_HUMAN_BODY_MOTION_PARAM = 13
# 人體距離查詢
TYPE_QUERY_HUMAN_DISTANCE = 14
# 人體方位查詢
TYPE_QUERY_HUMAN_DIRECTION = 15
# 心率監測指令信息查詢和設置類型
# 打開心率監測功能
TYPE_CONTROL_HEART_RATE_MONITOR_ON = 16
# 關閉心率監測功能
TYPE_CONTROL_HEART_RATE_MONITOR_OFF = 17
# 查詢心率監測開關狀態
TYPE_QUERY_HEART_RATE_MONITOR_SWITCH = 18
# 打開心率波形上報開關
TYPE_CONTROL_HEART_RATE_WAVEFORM_REPORT_ON = 19
# 關閉心率波形上報開關
TYPE_CONTROL_HEART_RATE_WAVEFORM_REPORT_OFF = 20
# 查詢心率波形上報開關狀態
TYPE_QUERY_HEART_RATE_WAVEFORM_REPORT_SWITCH = 21
# 心率數值查詢
TYPE_QUERY_HEART_RATE_VALUE = 22
# 心率波形查詢
TYPE_QUERY_HEART_RATE_WAVEFORM = 23
# 呼吸監測指令信息查詢和設置類型
# 打開呼吸監測功能
TYPE_CONTROL_BREATH_MONITOR_ON = 24
# 關閉呼吸監測功能
TYPE_CONTROL_BREATH_MONITOR_OFF = 25
# 查詢呼吸監測開關狀態
TYPE_QUERY_BREATH_MONITOR_SWITCH = 26
# 設置低緩呼吸判讀閾值
TYPE_SET_LOW_BREATH_THRESHOLD = 27
# 查詢低緩呼吸判讀閾值
TYPE_QUERY_LOW_BREATH_THRESHOLD = 28
# 呼吸信息查詢
TYPE_QUERY_BREATH_INFO = 29
# 呼吸數值查詢
TYPE_QUERY_BREATH_VALUE = 30
# 打開呼吸波形上報開關
TYPE_CONTROL_BREATH_WAVEFORM_REPORT_ON = 31
# 關閉呼吸波形上報開關
TYPE_CONTROL_BREATH_WAVEFORM_REPORT_OFF = 32
# 查詢呼吸波形上報開關狀態
TYPE_QUERY_BREATH_WAVEFORM_REPORT_SWITCH = 33
# 呼吸波形查詢
TYPE_QUERY_BREATH_WAVEFORM = 34
# 睡眠監測指令信息查詢和設置類型
# 打開睡眠監測功能
TYPE_CONTROL_SLEEP_MONITOR_ON = 35
# 關閉睡眠監測功能
TYPE_CONTROL_SLEEP_MONITOR_OFF = 36
# 查詢睡眠監測開關狀態
TYPE_QUERY_SLEEP_MONITOR_SWITCH = 37
# 打開異常掙扎狀態監測
TYPE_CONTROL_ABNORMAL_STRUGGLE_ON = 38
# 關閉異常掙扎狀態監測
TYPE_CONTROL_ABNORMAL_STRUGGLE_OFF = 39
# 查詢異常掙扎狀態開關
TYPE_QUERY_ABNORMAL_STRUGGLE_SWITCH = 40
# 查詢異常掙扎狀態
TYPE_QUERY_ABNORMAL_STRUGGLE_STATUS = 41
# 設置掙扎狀態判讀靈敏度
TYPE_SET_STRUGGLE_SENSITIVITY = 42
# 查詢掙扎狀態判讀靈敏度
TYPE_QUERY_STRUGGLE_SENSITIVITY = 43
# 打開無人計時功能
TYPE_CONTROL_NO_PERSON_TIMING_ON = 44
# 關閉無人計時功能
TYPE_CONTROL_NO_PERSON_TIMING_OFF = 45
# 查詢無人計時功能開關
TYPE_QUERY_NO_PERSON_TIMING_SWITCH = 46
# 設置無人計時時長
TYPE_SET_NO_PERSON_TIMING_DURATION = 47
# 查詢無人計時時長
TYPE_QUERY_NO_PERSON_TIMING_DURATION = 48
# 設置睡眠截止時長
TYPE_SET_SLEEP_END_DURATION = 49
# 查詢睡眠截止時長
TYPE_QUERY_SLEEP_END_DURATION = 50
# 入牀/離牀狀態查詢
TYPE_QUERY_BED_STATUS = 51
# 睡眠狀態查詢
TYPE_QUERY_SLEEP_STATUS = 52
# 清醒時長查詢
TYPE_QUERY_AWAKE_DURATION = 53
# 淺睡時長查詢
TYPE_QUERY_LIGHT_SLEEP_DURATION = 54
# 深睡時長查詢
TYPE_QUERY_DEEP_SLEEP_DURATION = 55
# 睡眠質量評分查詢
TYPE_QUERY_SLEEP_QUALITY_SCORE = 56
# 睡眠綜合狀態查詢
TYPE_QUERY_SLEEP_COMPREHENSIVE_STATUS = 57
# 睡眠異常查詢
TYPE_QUERY_SLEEP_ANOMALY = 58
# 睡眠統計查詢
TYPE_QUERY_SLEEP_STATISTICS = 59
# 睡眠質量評級查詢
TYPE_QUERY_SLEEP_QUALITY_LEVEL = 60
def __init__(self, data_processor, parse_interval=50,presence_enabled=True, heart_rate_enabled=True,
breath_monitoring_enabled=True, sleep_monitoring_enabled=True):
_"""_
_ 初始化R60ABD1實例_
_ Args:_
_ data_processor: DataFlowProcessor實例_
_ presence_enabled: 是否開啓人體存在信息監測_
_ heart_rate_enabled: 是否開啓心率監測_
_ breath_monitoring_enabled: 是否開啓呼吸監測_
_ sleep_monitoring_enabled: 是否開啓睡眠監測_
_ """_
_ _if parse_interval > 200:
raise ValueError("parse_interval must be less than 200ms")
self.data_processor = data_processor
self.parse_interval = parse_interval
# 添加運行狀態標誌
self._is_running = False
# ============================ 1. 系統級屬性 ============================
# 心跳包監控
self.heartbeat_last_received = 0 # 最後接收心跳包時間戳(ms)
self.heartbeat_timeout_count = 0 # 心跳超時累計次數
self.heartbeat_interval = 0 # 實際心跳間隔統計(ms)
# 系統狀態
self.system_initialized = False # 初始化完成狀態(True/False)
self.system_initialized_timestamp = 0 # 初始化完成時間戳(ms)
self.module_reset_flag = False # 模組復位狀態標記
self.module_reset_timestamp = 0 # 模組復位時間戳(ms)
# 產品信息
self.product_model = "" # 產品型號(字符串)
self.product_id = "" # 產品ID(字符串)
self.hardware_model = "" # 硬件型號(字符串)
self.firmware_version = "" # 固件版本(字符串)
# ============================ 2. 雷達探測屬性 ============================
# 位置狀態
self.radar_in_range = False # 是否在探測範圍內
# ============================ 3. 人體存在檢測屬性 ============================
# 基本狀態
self.presence_enabled = presence_enabled # 人體存在功能開關
# 存在狀態
self.presence_status = 0 # 0:無人, 1:有人
# 運動狀態
self.motion_status = 0 # 0:無, 1:靜止, 2:活躍
# 量化數據
self.movement_parameter = 0 # 體動參數(0-100)
self.human_distance = 0 # 人體距離(0-65535 cm)
self.human_position_x = 0 # X座標(有符號)
self.human_position_y = 0 # Y座標(有符號)
self.human_position_z = 0 # Z座標(有符號)
# ============================ 4. 呼吸監測屬性 ============================
# 功能配置
self.breath_monitoring_enabled = breath_monitoring_enabled # 呼吸監測開關
self.breath_waveform_enabled = False # 呼吸波形上報開關
self.low_breath_threshold = 10 # 低緩呼吸閾值(10-20次/min)
# 監測數據
self.breath_status = 0 # 1:正常, 2:過高, 3:過低, 4:無
self.breath_value = 0 # 呼吸數值(0-35次/分)
self.breath_waveform = [0, 0, 0, 0, 0] # 5個字節的波形數據
# ============================ 5. 心率監測屬性 ============================
# 功能配置
self.heart_rate_enabled = heart_rate_enabled # 心率監測開關
self.heart_rate_waveform_enabled = False # 心率波形上報開關
# 監測數據
self.heart_rate_value = 0 # 心率數值(60-120)
self.heart_rate_waveform = [0, 0, 0, 0, 0] # 5個字節的波形數據
# ============================ 6. 睡眠監測屬性 ============================
# 基礎狀態
self.sleep_monitoring_enabled = sleep_monitoring_enabled # 睡眠監測開關
self.bed_status = 0 # 0:離牀, 1:入牀, 2:無
self.sleep_status = 0 # 0:深睡, 1:淺睡, 2:清醒, 3:無
# 時長統計
self.awake_duration = 0 # 清醒時長(分鐘)
self.light_sleep_duration = 0 # 淺睡時長(分鐘)
self.deep_sleep_duration = 0 # 深睡時長(分鐘)
# 睡眠質量
self.sleep_quality_score = 0 # 睡眠質量評分(0-100)
self.sleep_quality_rating = 0 # 睡眠質量評級
# 綜合狀態
self.sleep_comprehensive_status = {} # 包含8個字段的字典
self.sleep_anomaly = 0 # 睡眠異常狀態
self.abnormal_struggle_status = 0 # 異常掙扎狀態
self.no_person_timing_status = 0 # 無人計時狀態
# 配置參數
self.abnormal_struggle_enabled = False # 異常掙扎開關
self.no_person_timing_enabled = False # 無人計時開關
self.no_person_timing_duration = 30 # 無人計時時長
self.sleep_cutoff_duration = 120 # 睡眠截止時長
self.struggle_sensitivity = 1 # 掙扎靈敏度
# 查詢狀態管理
self._query_in_progress = False # 是否有查詢在進行中
self._query_response_received = False # 是否收到查詢響應
self._query_result = None # 查詢結果
self._current_query_type = None # 當前查詢類型
self._query_timeout = 200 # 默認查詢超時時間(ms)
self.timer = Timer(-1)
self._start_timer()
def _start_timer(self):
_"""啓動定時器"""_
_ _self._is_running = True
self.timer.init(period=self.parse_interval, mode=Timer.PERIODIC, callback=self._timer_callback)
def _timer_callback(self, timer):
_"""_
_ 定時器回調函數,定期解析數據幀_
_ Args:_
_ timer: 定時器實例_
_ """_
_ _if not self._is_running:
return
# 調用DataFlowProcessor的解析方法
frames = self.data_processor.read_and_parse()
# 對每個解析到的幀使用micropython.schedule進行異步處理
for frame in frames:
# 使用micropython.schedule安全地調用屬性更新方法
micropython.schedule(self.update_properties_from_frame, frame)
def _calculate_crc(self, data_bytes):
_"""_
_ 計算CRC校驗碼_
_ 校驗碼計算:幀頭+控制字+命令字+長度標識+數據 求和後,取低八位_
_ Args:_
_ data_bytes: 字節序列或字節數組_
_ Returns:_
_ int: CRC校驗碼_
_ """_
_ _return sum(data_bytes) & 0xFF
def _parse_human_position_data(self, data_bytes):
_"""_
_ 解析人體方位數據 (6字節: X(2B), Y(2B), Z(2B))_
_ 位置信息有正負:16位數據,最高位為符號位,剩餘15位為數據位_
_ Returns:_
_ tuple: (x, y, z) 座標值,單位cm_
_ """_
_ _if len(data_bytes) != 6:
return (0, 0, 0)
x = self._parse_signed_16bit_special(data_bytes[0:2])
y = self._parse_signed_16bit_special(data_bytes[2:4])
z = self._parse_signed_16bit_special(data_bytes[4:6])
return (x, y, z)
def _parse_signed_16bit_special(self, two_bytes):
_"""_
_ 解析有符號16位數據(特殊格式:首位符號位 + 後15位數值位)_
_ 最高位為符號位,0=正數,1=負數,剩餘15位為數值_
_ Args:_
_ two_bytes: 2字節的字節序列(大端序)_
_ Returns:_
_ int: 有符號16位整數_
_ """_
_ _if len(two_bytes) != 2:
return 0
# 組合成16位無符號整數(大端序)
unsigned_value = (two_bytes[0] << 8) | two_bytes[1]
# 提取符號位和數值
sign_bit = (unsigned_value >> 15) & 0x1 # 最高位為符號位
magnitude = unsigned_value & 0x7FFF # 低15位為數值
# 根據符號位確定正負
if sign_bit == 1: # 負數
return -magnitude
else: # 正數
return magnitude
def _parse_heart_rate_waveform_data(self, data_bytes):
_"""_
_ 解析心率波形數據 (5字節)_
_ 5個字節代表實時1s內5個數值,波形為正弦波數據,中軸線為128_
_ Returns:_
_ tuple: 5個波形數據值 (v1, v2, v3, v4, v5),數值範圍0-255_
_ """_
_ _if len(data_bytes) != 5:
return (128, 128, 128, 128, 128)
return (
data_bytes[0],
data_bytes[1],
data_bytes[2],
data_bytes[3],
data_bytes[4]
)
def _parse_sleep_comprehensive_data(self, data_bytes):
_"""_
_ 解析睡眠綜合狀態數據 (8字節)_
_ Returns:_
_ tuple: (存在, 睡眠狀態, 平均呼吸, 平均心跳, 翻身次數, 大幅度體動佔比, 小幅度體動佔比, 呼吸暫停次數)_
_ """_
_ _if len(data_bytes) != 8:
return (0, 0, 0, 0, 0, 0, 0, 0)
return (
data_bytes[0], # 存在: 1有人 0無人
data_bytes[1], # 睡眠狀態: 3離牀 2清醒 1淺睡 0深睡
data_bytes[2], # 平均呼吸: 10分鐘內檢測的平均值
data_bytes[3], # 平均心跳: 10分鐘內檢測的平均值
data_bytes[4], # 翻身次數: 處於淺睡或深睡的翻身次數
data_bytes[5], # 大幅度體動佔比: 0~100
data_bytes[6], # 小幅度體動佔比: 0~100
data_bytes[7] # 呼吸暫停次數: 10分鐘呼吸暫停次數
)
def _parse_sleep_statistics_data(self, data_bytes):
_"""_
_ 解析睡眠統計信息數據 (12字節)_
_ Returns:_
_ tuple: (睡眠質量評分, 睡眠總時長, 清醒時長佔比, 淺睡時長佔比, 深睡時長佔比,_
_ 離牀時長, 離牀次數, 翻身次數, 平均呼吸, 平均心跳, 呼吸暫停次數)_
_ """_
_ _if len(data_bytes) != 12:
return (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0)
# 解析2字節的睡眠總時長
total_sleep_duration = (data_bytes[1] << 8) | data_bytes[2]
return (
data_bytes[0], # 睡眠質量評分: 0~100
total_sleep_duration, # 睡眠總時長: 0~65535分鐘
data_bytes[3], # 清醒時長佔比: 0~100
data_bytes[4], # 淺睡時長佔比: 0~100
data_bytes[5], # 深睡時長佔比: 0~100
data_bytes[6], # 離牀時長: 0~255
data_bytes[7], # 離牀次數: 0~255
data_bytes[8], # 翻身次數: 0~255
data_bytes[9], # 平均呼吸: 0~25
data_bytes[10], # 平均心跳: 0~100
data_bytes[11] # 呼吸暫停次數: 0~10
)
def _parse_breath_waveform_data(self, data_bytes):
_"""_
_ 解析呼吸波形數據 (5字節)_
_ 5個字節代表實時1s內5個數值,波形為正弦波數據,中軸線為128_
_ Returns:_
_ tuple: 5個波形數據值 (v1, v2, v3, v4, v5),數值範圍0-255_
_ """_
_ _if len(data_bytes) != 5:
return (128, 128, 128, 128, 128)
return (
data_bytes[0],
data_bytes[1],
data_bytes[2],
data_bytes[3],
data_bytes[4]
)
def _parse_product_info_data(self, data_bytes):
_"""_
_ 解析產品信息數據 (可變長度字符串)_
_ 正確處理包含空字節的字符串_
_ """_
_ _try:
if R60ABD1.DEBUG_ENABLED:
print(f"[Parse] Raw product data: {data_bytes}, hex: {data_bytes.hex()}")
# 找到第一個空字節的位置,截取有效部分
if b'\x00' in data_bytes:
# 找到第一個空字節,截取之前的部分
null_index = data_bytes.index(b'\x00')
valid_data = data_bytes[:null_index]
if R60ABD1.DEBUG_ENABLED:
print(f"[Parse] After null removal: {valid_data}, hex: {valid_data.hex()}")
else:
valid_data = data_bytes
# 解碼為字符串 - 移除關鍵字參數
# MicroPython 的 decode 方法不支持 errors='ignore' 關鍵字參數
product_info = valid_data.decode('utf-8').strip()
if R60ABD1.DEBUG_ENABLED:
print(f"[Parse] Decoded product info: '{product_info}'")
return (product_info,)
except Exception as e:
# 如果解碼失敗,嘗試其他方式
if R60ABD1.DEBUG_ENABLED:
print(f"[Parse] Product info parse error: {e}, data: {data_bytes}")
# 嘗試使用 ascii 解碼作為備選方案
try:
product_info = valid_data.decode('ascii').strip()
if R60ABD1.DEBUG_ENABLED:
print(f"[Parse] ASCII decoded product info: '{product_info}'")
return (product_info,)
except:
return ("",)
def _parse_firmware_version_data(self, data_bytes):
_"""_
_ 解析固件版本數據 (可變長度字符串)_
_ 正確處理包含空字節的字符串_
_ """_
_ _try:
if R60ABD1.DEBUG_ENABLED:
print(f"[Parse] Raw firmware data: {data_bytes}, hex: {data_bytes.hex()}")
# 找到第一個空字節的位置,截取有效部分
if b'\x00' in data_bytes:
# 找到第一個空字節,截取之前的部分
null_index = data_bytes.index(b'\x00')
valid_data = data_bytes[:null_index]
if R60ABD1.DEBUG_ENABLED:
print(f"[Parse] After null removal: {valid_data}, hex: {valid_data.hex()}")
else:
valid_data = data_bytes
# 解碼為字符串 - 移除關鍵字參數
version = valid_data.decode('utf-8').strip()
if R60ABD1.DEBUG_ENABLED:
print(f"[Parse] Decoded firmware version: '{version}'")
return (version,)
except Exception as e:
# 如果解碼失敗,嘗試其他方式
if R60ABD1.DEBUG_ENABLED:
print(f"[Parse] Firmware version parse error: {e}, data: {data_bytes}")
# 嘗試使用 ascii 解碼作為備選方案
try:
version = valid_data.decode('ascii').strip()
if R60ABD1.DEBUG_ENABLED:
print(f"[Parse] ASCII decoded firmware version: '{version}'")
return (version,)
except:
return ("",)
def query_heartbeat(self, timeout=200):
_"""_
_ 查詢心跳包(阻塞式)_
_ Args:_
_ timeout: 超時時間,單位毫秒_
_ Returns:_
_ tuple: (查詢狀態, 心跳狀態)_
_ - 查詢狀態: True-查詢成功, False-查詢失敗_
_ - 心跳狀態: True-心跳正常, False-心跳異常 (查詢成功時有效)_
_ """_
_ _# 檢查查詢狀態,避免多個查詢同時進行
if self._query_in_progress:
if R60ABD1.DEBUG_ENABLED:
print("[Query] Another query in progress, aborting")
return False, None
try:
# 保存原始定時器狀態並臨時禁用定時器,避免數據競爭
original_running = self._is_running
self._is_running = False
# 設置查詢狀態標誌
self._query_in_progress = True
self._query_response_received = False
self._query_result = None
self._current_query_type = R60ABD1.TYPE_QUERY_HEARTBEAT
# 構造心跳包查詢指令幀
header = bytes([0x53, 0x59]) # 幀頭
control = bytes([0x01]) # 控制字:系統指令
command = bytes([0x80]) # 命令字:心跳包查詢
length = bytes([0x00, 0x01]) # 數據長度:1字節
data = bytes([0x0F]) # 固定數據
# 計算CRC校驗碼
crc_data = header + control + command + length + data
crc = self._calculate_crc(crc_data)
trailer = bytes([0x54, 0x43]) # 幀尾
query_frame = crc_data + bytes([crc]) + trailer
# 發送查詢指令
self.data_processor.uart.write(query_frame)
if R60ABD1.DEBUG_ENABLED:
print("[Query] Heartbeat query sent")
# 打印發送的指令幀用於調試
frame_hex = ' '.join(['{:02X}'.format(b) for b in query_frame])
print(f"[Query] Sent frame: {frame_hex}")
# 等待設備響應
start_time = time.ticks_ms()
while not self._query_response_received:
# 檢查是否超時
if time.ticks_diff(time.ticks_ms(), start_time) >= timeout:
if R60ABD1.DEBUG_ENABLED:
print("[Query] Heartbeat query timeout")
return False, None
# 短暫延遲避免過度佔用CPU
time.sleep_us(100)
# 繼續處理數據流,確保響應能被解析
frames = self.data_processor.read_and_parse()
for frame in frames:
self.update_properties_from_frame(frame)
# 返回查詢結果:成功狀態和心跳狀態
return True, self._query_result
except Exception as e:
# 異常處理:打印錯誤信息並返回失敗狀態
if R60ABD1.DEBUG_ENABLED:
print(f"[Query] Heartbeat query error: {e}")
return False, None
finally:
# 清理查詢狀態,確保資源正確釋放
self._query_in_progress = False
self._query_response_received = False
self._query_result = None
self._current_query_type = None
# 恢復定時器狀態
try:
self._is_running = original_running
except NameError:
pass # 如果original_running未定義,保持當前狀態
if R60ABD1.DEBUG_ENABLED:
print("[Query] Heartbeat query state reset")
def reset_module(self, timeout=500):
_"""_
_ 模組復位(阻塞式)_
_ Args:_
_ timeout: 超時時間,單位毫秒(復位需要較長時間,默認500ms)_
_ Returns:_
_ bool: True-復位成功, False-復位失敗_
_ """_
_ _if self._query_in_progress:
if R60ABD1.DEBUG_ENABLED:
print("[Query] Another query in progress, aborting")
return False
try:
# 保存原始定時器狀態並臨時禁用定時器
original_running = self._is_running
self._is_running = False
# 設置復位查詢狀態
self._query_in_progress = True
self._query_response_received = False
self._query_result = None
self._current_query_type = R60ABD1.TYPE_MODULE_RESET
# 構造模組復位指令幀
header = bytes([0x53, 0x59]) # 幀頭
control = bytes([0x01]) # 控制字:系統指令
command = bytes([0x02]) # 命令字:模組復位
length = bytes([0x00, 0x01]) # 數據長度:1字節
data = bytes([0x0F]) # 固定數據
# 計算CRC校驗碼
crc_data = header + control + command + length + data
crc = self._calculate_crc(crc_data)
trailer = bytes([0x54, 0x43]) # 幀尾
query_frame = crc_data + bytes([crc]) + trailer
# 發送復位指令
self.data_processor.uart.write(query_frame)
if R60ABD1.DEBUG_ENABLED:
print("[Query] Module reset command sent")
frame_hex = ' '.join(['{:02X}'.format(b) for b in query_frame])
print(f"[Query] Sent frame: {frame_hex}")
# 等待復位響應(設備會原樣返回指令作為確認)
start_time = time.ticks_ms()
while not self._query_response_received:
if time.ticks_diff(time.ticks_ms(), start_time) >= timeout:
if R60ABD1.DEBUG_ENABLED:
print("[Query] Module reset timeout")
return False
time.sleep_us(100)
frames = self.data_processor.read_and_parse()
for frame in frames:
self.update_properties_from_frame(frame)
# 返回復位結果
return self._query_result
except Exception as e:
if R60ABD1.DEBUG_ENABLED:
print(f"[Query] Module reset error: {e}")
return False
finally:
# 清理查詢狀態
self._query_in_progress = False
self._query_response_received = False
self._query_result = None
self._current_query_type = None
# 恢復定時器狀態
try:
self._is_running = original_running
except NameError:
pass
if R60ABD1.DEBUG_ENABLED:
print("[Query] Module reset state reset")
def query_product_model(self, timeout=200):
_"""_
_ 查詢產品型號(阻塞式)_
_ Args:_
_ timeout: 超時時間,單位毫秒_
_ Returns:_
_ tuple: (查詢狀態, 產品型號)_
_ - 查詢狀態: True-查詢成功, False-查詢失敗_
_ - 產品型號: 字符串 (查詢成功時有效)_
_ """_
_ _if self._query_in_progress:
if R60ABD1.DEBUG_ENABLED:
print("[Query] Another query in progress, aborting")
return False, None
try:
# 保存原始定時器狀態並臨時禁用定時器
original_running = self._is_running
self._is_running = False
# 設置產品型號查詢狀態
self._query_in_progress = True
self._query_response_received = False
self._query_result = None
self._current_query_type = R60ABD1.TYPE_QUERY_PRODUCT_MODEL
# 構造產品型號查詢指令幀
header = bytes([0x53, 0x59]) # 幀頭
control = bytes([0x02]) # 控制字:產品信息
command = bytes([0xA1]) # 命令字:產品型號查詢
length = bytes([0x00, 0x01]) # 數據長度:1字節
data = bytes([0x0F]) # 固定數據
# 計算CRC校驗碼
crc_data = header + control + command + length + data
crc = self._calculate_crc(crc_data)
trailer = bytes([0x54, 0x43]) # 幀尾
query_frame = crc_data + bytes([crc]) + trailer
# 發送查詢指令
self.data_processor.uart.write(query_frame)
if R60ABD1.DEBUG_ENABLED:
print("[Query] Product model query sent")
frame_hex = ' '.join(['{:02X}'.format(b) for b in query_frame])
print(f"[Query] Sent frame: {frame_hex}")
# 等待產品型號響應
start_time = time.ticks_ms()
while not self._query_response_received:
if time.ticks_diff(time.ticks_ms(), start_time) >= timeout:
if R60ABD1.DEBUG_ENABLED:
print("[Query] Product model query timeout")
return False, None
time.sleep_us(100)
frames = self.data_processor.read_and_parse()
for frame in frames:
self.update_properties_from_frame(frame)
# 返回查詢結果:成功狀態和產品型號字符串
return True, self._query_result
except Exception as e:
if R60ABD1.DEBUG_ENABLED:
print(f"[Query] Product model query error: {e}")
return False, None
finally:
# 清理查詢狀態
self._query_in_progress = False
self._query_response_received = False
self._query_result = None
self._current_query_type = None
# 恢復定時器狀態
try:
self._is_running = original_running
except NameError:
pass
if R60ABD1.DEBUG_ENABLED:
print("[Query] Product model query state reset")
def query_product_id(self, timeout=200):
_"""_
_ 查詢產品ID(阻塞式)_
_ Args:_
_ timeout: 超時時間,單位毫秒_
_ Returns:_
_ tuple: (查詢狀態, 產品ID)_
_ - 查詢狀態: True-查詢成功, False-查詢失敗_
_ - 產品ID: 字符串 (查詢成功時有效)_
_ """_
_ _if self._query_in_progress:
if R60ABD1.DEBUG_ENABLED:
print("[Query] Another query in progress, aborting")
return False, None
try:
original_running = self._is_running
self._is_running = False
self._query_in_progress = True
self._query_response_received = False
self._query_result = None
self._current_query_type = R60ABD1.TYPE_QUERY_PRODUCT_ID
# 構造產品ID查詢指令
header = bytes([0x53, 0x59])
control = bytes([0x02])
command = bytes([0xA2])
length = bytes([0x00, 0x01])
data = bytes([0x0F])
crc_data = header + control + command + length + data
crc = self._calculate_crc(crc_data)
trailer = bytes([0x54, 0x43])
query_frame = crc_data + bytes([crc]) + trailer
self.data_processor.uart.write(query_frame)
if R60ABD1.DEBUG_ENABLED:
print("[Query] Product ID query sent")
frame_hex = ' '.join(['{:02X}'.format(b) for b in query_frame])
print(f"[Query] Sent frame: {frame_hex}")
# 等待響應
start_time = time.ticks_ms()
while not self._query_response_received:
if time.ticks_diff(time.ticks_ms(), start_time) >= timeout:
if R60ABD1.DEBUG_ENABLED:
print("[Query] Product ID query timeout")
return False, None
time.sleep_us(100)
frames = self.data_processor.read_and_parse()
for frame in frames:
self.update_properties_from_frame(frame)
return True, self._query_result
except Exception as e:
if R60ABD1.DEBUG_ENABLED:
print(f"[Query] Product ID query error: {e}")
return False, None
finally:
self._query_in_progress = False
self._query_response_received = False
self._query_result = None
self._current_query_type = None
try:
self._is_running = original_running
except NameError:
pass
if R60ABD1.DEBUG_ENABLED:
print("[Query] Product ID query state reset")
def query_hardware_model(self, timeout=200):
_"""_
_ 查詢硬件型號(阻塞式)_
_ Args:_
_ timeout: 超時時間,單位毫秒_
_ Returns:_
_ tuple: (查詢狀態, 硬件型號)_
_ - 查詢狀態: True-查詢成功, False-查詢失敗_
_ - 硬件型號: 字符串 (查詢成功時有效)_
_ """_
_ _if self._query_in_progress:
if R60ABD1.DEBUG_ENABLED:
print("[Query] Another query in progress, aborting")
return False, None
try:
original_running = self._is_running
self._is_running = False
self._query_in_progress = True
self._query_response_received = False
self._query_result = None
self._current_query_type = R60ABD1.TYPE_QUERY_HARDWARE_MODEL
# 構造硬件型號查詢指令
header = bytes([0x53, 0x59])
control = bytes([0x02])
command = bytes([0xA3])
length = bytes([0x00, 0x01])
data = bytes([0x0F])
crc_data = header + control + command + length + data
crc = self._calculate_crc(crc_data)
trailer = bytes([0x54, 0x43])
query_frame = crc_data + bytes([crc]) + trailer
self.data_processor.uart.write(query_frame)
if R60ABD1.DEBUG_ENABLED:
print("[Query] Hardware model query sent")
frame_hex = ' '.join(['{:02X}'.format(b) for b in query_frame])
print(f"[Query] Sent frame: {frame_hex}")
# 等待響應
start_time = time.ticks_ms()
while not self._query_response_received:
if time.ticks_diff(time.ticks_ms(), start_time) >= timeout:
if R60ABD1.DEBUG_ENABLED:
print("[Query] Hardware model query timeout")
return False, None
time.sleep_us(100)
frames = self.data_processor.read_and_parse()
for frame in frames:
self.update_properties_from_frame(frame)
return True, self._query_result
except Exception as e:
if R60ABD1.DEBUG_ENABLED:
print(f"[Query] Hardware model query error: {e}")
return False, None
finally:
self._query_in_progress = False
self._query_response_received = False
self._query_result = None
self._current_query_type = None
try:
self._is_running = original_running
except NameError:
pass
if R60ABD1.DEBUG_ENABLED:
print("[Query] Hardware model query state reset")
def query_firmware_version(self, timeout=200):
_"""_
_ 查詢固件版本(阻塞式)_
_ Args:_
_ timeout: 超時時間,單位毫秒_
_ Returns:_
_ tuple: (查詢狀態, 固件版本)_
_ - 查詢狀態: True-查詢成功, False-查詢失敗_
_ - 固件版本: 字符串 (查詢成功時有效)_
_ """_
_ _if self._query_in_progress:
if R60ABD1.DEBUG_ENABLED:
print("[Query] Another query in progress, aborting")
return False, None
try:
original_running = self._is_running
self._is_running = False
self._query_in_progress = True
self._query_response_received = False
self._query_result = None
self._current_query_type = R60ABD1.TYPE_QUERY_FIRMWARE_VERSION
# 構造固件版本查詢指令
header = bytes([0x53, 0x59])
control = bytes([0x02])
command = bytes([0xA4])
length = bytes([0x00, 0x01])
data = bytes([0x0F])
crc_data = header + control + command + length + data
crc = self._calculate_crc(crc_data)
trailer = bytes([0x54, 0x43])
query_frame = crc_data + bytes([crc]) + trailer
self.data_processor.uart.write(query_frame)
if R60ABD1.DEBUG_ENABLED:
print("[Query] Firmware version query sent")
frame_hex = ' '.join(['{:02X}'.format(b) for b in query_frame])
print(f"[Query] Sent frame: {frame_hex}")
# 等待響應
start_time = time.ticks_ms()
while not self._query_response_received:
if time.ticks_diff(time.ticks_ms(), start_time) >= timeout:
if R60ABD1.DEBUG_ENABLED:
print("[Query] Firmware version query timeout")
return False, None
time.sleep_us(100)
frames = self.data_processor.read_and_parse()
for frame in frames:
self.update_properties_from_frame(frame)
return True, self._query_result
except Exception as e:
if R60ABD1.DEBUG_ENABLED:
print(f"[Query] Firmware version query error: {e}")
return False, None
finally:
self._query_in_progress = False
self._query_response_received = False
self._query_result = None
self._current_query_type = None
try:
self._is_running = original_running
except NameError:
pass
if R60ABD1.DEBUG_ENABLED:
print("[Query] Firmware version query state reset")
def query_init_complete(self, timeout=200):
_"""_
_ 查詢初始化是否完成(阻塞式)_
_ Args:_
_ timeout: 超時時間,單位毫秒_
_ Returns:_
_ tuple: (查詢狀態, 初始化狀態)_
_ - 查詢狀態: True-查詢成功, False-查詢失敗_
_ - 初始化狀態: True-已完成, False-未完成 (查詢成功時有效)_
_ """_
_ _if self._query_in_progress:
if R60ABD1.DEBUG_ENABLED:
print("[Query] Another query in progress, aborting")
return False, None
try:
original_running = self._is_running
self._is_running = False
self._query_in_progress = True
self._query_response_received = False
self._query_result = None
self._current_query_type = R60ABD1.TYPE_QUERY_INIT_COMPLETE
# 構造初始化完成查詢指令
header = bytes([0x53, 0x59])
control = bytes([0x05])
command = bytes([0x81])
length = bytes([0x00, 0x01])
data = bytes([0x0F])
crc_data = header + control + command + length + data
crc = self._calculate_crc(crc_data)
trailer = bytes([0x54, 0x43])
query_frame = crc_data + bytes([crc]) + trailer
self.data_processor.uart.write(query_frame)
if R60ABD1.DEBUG_ENABLED:
print("[Query] Init complete query sent")
frame_hex = ' '.join(['{:02X}'.format(b) for b in query_frame])
print(f"[Query] Sent frame: {frame_hex}")
# 等待響應
start_time = time.ticks_ms()
while not self._query_response_received:
if time.ticks_diff(time.ticks_ms(), start_time) >= timeout:
if R60ABD1.DEBUG_ENABLED:
print("[Query] Init complete query timeout")
return False, None
time.sleep_us(100)
frames = self.data_processor.read_and_parse()
for frame in frames:
self.update_properties_from_frame(frame)
return True, self._query_result
except Exception as e:
if R60ABD1.DEBUG_ENABLED:
print(f"[Query] Init complete query error: {e}")
return False, None
finally:
self._query_in_progress = False
self._query_response_received = False
self._query_result = None
self._current_query_type = None
try:
self._is_running = original_running
except NameError:
pass
if R60ABD1.DEBUG_ENABLED:
print("[Query] Init complete query state reset")
def query_radar_range_boundary(self, timeout=200):
_"""_
_ 查詢雷達探測範圍越界狀態(阻塞式)_
_ Args:_
_ timeout: 超時時間,單位毫秒_
_ Returns:_
_ tuple: (查詢狀態, 越界狀態)_
_ - 查詢狀態: True-查詢成功, False-查詢失敗_
_ - 越界狀態: True-越界, False-正常範圍內 (查詢成功時有效)_
_ """_
_ _if self._query_in_progress:
if R60ABD1.DEBUG_ENABLED:
print("[Query] Another query in progress, aborting")
return False, None
try:
original_running = self._is_running
self._is_running = False
self._query_in_progress = True
self._query_response_received = False
self._query_result = None
self._current_query_type = R60ABD1.TYPE_QUERY_RADAR_RANGE_BOUNDARY
# 構造雷達探測範圍查詢指令
header = bytes([0x53, 0x59])
control = bytes([0x07])
command = bytes([0x87])
length = bytes([0x00, 0x01])
data = bytes([0x0F])
crc_data = header + control + command + length + data
crc = self._calculate_crc(crc_data)
trailer = bytes([0x54, 0x43])
query_frame = crc_data + bytes([crc]) + trailer
self.data_processor.uart.write(query_frame)
if R60ABD1.DEBUG_ENABLED:
print("[Query] Radar range boundary query sent")
frame_hex = ' '.join(['{:02X}'.format(b) for b in query_frame])
print(f"[Query] Sent frame: {frame_hex}")
# 等待響應
start_time = time.ticks_ms()
while not self._query_response_received:
if time.ticks_diff(time.ticks_ms(), start_time) >= timeout:
if R60ABD1.DEBUG_ENABLED:
print("[Query] Radar range boundary query timeout")
return False, None
time.sleep_us(100)
frames = self.data_processor.read_and_parse()
for frame in frames:
self.update_properties_from_frame(frame)
return True, self._query_result
except Exception as e:
if R60ABD1.DEBUG_ENABLED:
print(f"[Query] Radar range boundary query error: {e}")
return False, None
finally:
self._query_in_progress = False
self._query_response_received = False
self._query_result = None
self._current_query_type = None
try:
self._is_running = original_running
except NameError:
pass
if R60ABD1.DEBUG_ENABLED:
print("[Query] Radar range boundary query state reset")
def query_presence_status(self, timeout=200):
_"""_
_ 查詢存在信息狀態(阻塞式)_
_ Args:_
_ timeout: 超時時間,單位毫秒_
_ Returns:_
_ tuple: (查詢狀態, 存在狀態信息)_
_ - 查詢狀態: True-查詢成功, False-查詢失敗_
_ - 存在狀態信息: 0-無人, 1-有人 (查詢成功時有效)_
_ """_
_ _# 檢查是否已有查詢在進行中
if self._query_in_progress:
if R60ABD1.DEBUG_ENABLED:
print("[Query] Another query in progress, aborting")
return False, None
try:
# 臨時禁用定時器回調,避免競爭
original_running = self._is_running
self._is_running = False
# 設置查詢狀態
self._query_in_progress = True
self._query_response_received = False
self._query_result = None
self._current_query_type = R60ABD1.TYPE_QUERY_HUMAN_EXISTENCE_INFO
# 構造併發送查詢指令
header = bytes([0x53, 0x59])
control = bytes([0x80])
command = bytes([0x81])
length = bytes([0x00, 0x01])
data = bytes([0x0F])
crc_data = header + control + command + length + data
crc = self._calculate_crc(crc_data)
trailer = bytes([0x54, 0x43])
query_frame = crc_data + bytes([crc]) + trailer
self.data_processor.uart.write(query_frame)
if R60ABD1.DEBUG_ENABLED:
print("[Query] Presence status query sent")
# 調試信息:打印發送的指令
frame_hex = ' '.join(['{:02X}'.format(b) for b in query_frame])
print(f"[Query] Sent frame: {frame_hex}")
# 等待響應
start_time = time.ticks_ms()
while not self._query_response_received:
# 檢查超時
if time.ticks_diff(time.ticks_ms(), start_time) >= timeout:
if R60ABD1.DEBUG_ENABLED:
print("[Query] Presence status query timeout")
return False, None
# 短暫延遲,避免完全佔用CPU
time.sleep_us(100)
# 繼續處理數據流(確保響應能被解析)
frames = self.data_processor.read_and_parse()
for frame in frames:
self.update_properties_from_frame(frame)
# 返回查詢結果
return True, self._query_result
except Exception as e:
if R60ABD1.DEBUG_ENABLED:
print(f"[Query] Presence status query error: {e}")
return False, None
finally:
# 重置所有查詢狀態
self._query_in_progress = False
self._query_response_received = False
self._query_result = None
self._current_query_type = None
# 安全地恢復定時器狀態
try:
self._is_running = original_running
except NameError:
# 如果 original_running 未定義,保持定時器運行狀態不變
pass
if R60ABD1.DEBUG_ENABLED:
print("[Query] Query state reset")
def update_properties_from_frame(self, frame):
_"""_
_ 根據解析的幀更新屬性值_
_ Args:_
_ frame: DataFlowProcessor解析後的幀數據字典_
_ """_
_ _control = frame['control_byte']
command = frame['command_byte']
data = frame['data']
# 心跳包 (0x01)
if control == 0x01:
# 心跳包上報
if command == 0x01:
self.heartbeat_last_received = time.ticks_ms()
if R60ABD1.DEBUG_ENABLED:
print("[Heartbeat] Received")
# 心跳包查詢響應
elif command == 0x80:
# 更新心跳包最後接收時間
self.heartbeat_last_received = time.ticks_ms()
# 處理心跳包查詢響應
if (self._query_in_progress and
self._current_query_type == R60ABD1.TYPE_QUERY_HEARTBEAT and
not self._query_response_received):
# 設置查詢結果為心跳正常
self._query_result = True
self._query_response_received = True
if R60ABD1.DEBUG_ENABLED:
print("[Query] Heartbeat response received")
# 當前正在進行其他類型的查詢,但收到了心跳包響應
elif self._query_in_progress and self._current_query_type != R60ABD1.TYPE_QUERY_HEARTBEAT:
if R60ABD1.DEBUG_ENABLED:
print(f"[Heartbeat] Unexpected query response during {self._current_query_type} query")
# 沒有查詢在進行,但收到了查詢響應
elif not self._query_in_progress:
if R60ABD1.DEBUG_ENABLED:
print("[Heartbeat] Unsolicited query response")
# 模組復位響應
elif command == 0x02:
# 模組復位成功,設備原樣返回指令作為確認
if (self._query_in_progress and
self._current_query_type == R60ABD1.TYPE_MODULE_RESET and
not self._query_response_received):
# 更新模組復位狀態和時間戳
self.module_reset_flag = True
self.module_reset_timestamp = time.ticks_ms()
self._query_result = True # 復位成功
self._query_response_received = True
if R60ABD1.DEBUG_ENABLED:
print("[Query] Module reset response received")
# 當前正在進行其他類型的查詢,但收到了模組復位響應
elif self._query_in_progress and self._current_query_type != R60ABD1.TYPE_MODULE_RESET:
if R60ABD1.DEBUG_ENABLED:
print(f"[Reset] Unexpected query response during {self._current_query_type} query")
# 沒有查詢在進行,但收到了查詢響應
elif not self._query_in_progress:
if R60ABD1.DEBUG_ENABLED:
print("[Reset] Unsolicited query response")
# 產品信息指令 (0x02)
elif control == 0x02:
# 產品型號查詢響應
if command == 0xA1:
if data:
# 解析產品型號數據
product_info = self._parse_product_info_data(data)[0]
# 更新產品型號屬性
self.product_model = product_info
# 處理產品型號查詢響應
if (self._query_in_progress and
self._current_query_type == R60ABD1.TYPE_QUERY_PRODUCT_MODEL and
not self._query_response_received):
# 設置查詢結果為產品型號字符串
self._query_result = product_info
self._query_response_received = True
if R60ABD1.DEBUG_ENABLED:
print(f"[Query] Product model response: {product_info}")
# 當前正在進行其他類型的查詢,但收到了產品型號響應
elif self._query_in_progress and self._current_query_type != R60ABD1.TYPE_QUERY_PRODUCT_MODEL:
if R60ABD1.DEBUG_ENABLED:
print(
f"[Product Model] Unexpected query response during {self._current_query_type} query: {product_info}")
# 沒有查詢在進行,但收到了查詢響應
elif not self._query_in_progress:
if R60ABD1.DEBUG_ENABLED:
print(f"[Product Model] Unsolicited query response: {product_info}")
# 產品ID查詢響應
elif command == 0xA2:
if data:
# 解析產品ID數據
product_id = self._parse_product_info_data(data)[0]
# 更新產品ID屬性
self.product_id = product_id
print(product_id)
# 處理產品ID查詢響應
if (self._query_in_progress and
self._current_query_type == R60ABD1.TYPE_QUERY_PRODUCT_ID and
not self._query_response_received):
# 設置查詢結果為產品ID字符串
self._query_result = product_id
self._query_response_received = True
if R60ABD1.DEBUG_ENABLED:
print(f"[Query] Product ID response: {product_id}")
# 當前正在進行其他類型的查詢,但收到了產品ID響應
elif self._query_in_progress and self._current_query_type != R60ABD1.TYPE_QUERY_PRODUCT_ID:
if R60ABD1.DEBUG_ENABLED:
print(
f"[Product ID] Unexpected query response during {self._current_query_type} query: {product_id}")
# 沒有查詢在進行,但收到了查詢響應
elif not self._query_in_progress:
if R60ABD1.DEBUG_ENABLED:
print(f"[Product ID] Unsolicited query response: {product_id}")
# 硬件型號查詢響應
elif command == 0xA3:
if data:
# 解析硬件型號數據
hardware_model = self._parse_product_info_data(data)[0]
# 更新硬件型號屬性
self.hardware_model = hardware_model
print(hardware_model)
# 處理硬件型號查詢響應
if (self._query_in_progress and
self._current_query_type == R60ABD1.TYPE_QUERY_HARDWARE_MODEL and
not self._query_response_received):
# 設置查詢結果為硬件型號字符串
self._query_result = hardware_model
self._query_response_received = True
if R60ABD1.DEBUG_ENABLED:
print(f"[Query] Hardware model response: {hardware_model}")
# 當前正在進行其他類型的查詢,但收到了硬件型號響應
elif self._query_in_progress and self._current_query_type != R60ABD1.TYPE_QUERY_HARDWARE_MODEL:
if R60ABD1.DEBUG_ENABLED:
print(
f"[Hardware Model] Unexpected query response during {self._current_query_type} query: {hardware_model}")
# 沒有查詢在進行,但收到了查詢響應
elif not self._query_in_progress:
if R60ABD1.DEBUG_ENABLED:
print(f"[Hardware Model] Unsolicited query response: {hardware_model}")
# 固件版本查詢響應
elif command == 0xA4:
if data:
# 解析固件版本數據
firmware_version = self._parse_firmware_version_data(data)[0]
# 更新固件版本屬性
self.firmware_version = firmware_version
print(firmware_version)
# 處理固件版本查詢響應
if (self._query_in_progress and
self._current_query_type == R60ABD1.TYPE_QUERY_FIRMWARE_VERSION and
not self._query_response_received):
# 設置查詢結果為固件版本字符串
self._query_result = firmware_version
self._query_response_received = True
if R60ABD1.DEBUG_ENABLED:
print(f"[Query] Firmware version response: {firmware_version}")
# 當前正在進行其他類型的查詢,但收到了固件版本響應
elif self._query_in_progress and self._current_query_type != R60ABD1.TYPE_QUERY_FIRMWARE_VERSION:
if R60ABD1.DEBUG_ENABLED:
print(
f"[Firmware] Unexpected query response during {self._current_query_type} query: {firmware_version}")
# 沒有查詢在進行,但收到了查詢響應
elif not self._query_in_progress:
if R60ABD1.DEBUG_ENABLED:
print(f"[Firmware] Unsolicited query response: {firmware_version}")
# 系統初始化狀態 (0x05)
elif control == 0x05:
# 初始化完成信息
if command == 0x01:
if data and len(data) > 0:
self.system_initialized = (data[0] == 0x01)
self.system_initialized_timestamp = time.ticks_ms()
if R60ABD1.DEBUG_ENABLED:
status = "completed" if self.system_initialized else "not completed"
print(f"[System] Initialization {status}")
# 初始化完成查詢響應
elif command == 0x81:
if data and len(data) > 0:
# 解析初始化狀態:0x01表示已完成
init_status = (data[0] == 0x01)
# 更新系統初始化狀態
self.system_initialized = init_status
# 處理初始化完成查詢響應
if (self._query_in_progress and
self._current_query_type == R60ABD1.TYPE_QUERY_INIT_COMPLETE and
not self._query_response_received):
# 設置查詢結果為初始化狀態
self._query_result = init_status
self._query_response_received = True
if R60ABD1.DEBUG_ENABLED:
status_text = "completed" if init_status else "not completed"
print(f"[Query] Init complete response: {status_text}")
# 當前正在進行其他類型的查詢,但收到了初始化完成響應
elif self._query_in_progress and self._current_query_type != R60ABD1.TYPE_QUERY_INIT_COMPLETE:
status_text = "completed" if init_status else "not completed"
if R60ABD1.DEBUG_ENABLED:
print(
f"[Init Complete] Unexpected query response during {self._current_query_type} query: {status_text}")
# 沒有查詢在進行,但收到了查詢響應
elif not self._query_in_progress:
if R60ABD1.DEBUG_ENABLED:
status_text = "completed" if init_status else "not completed"
print(f"[Init Complete] Unsolicited query response: {status_text}")
# 雷達探測範圍 (0x07)
elif control == 0x07:
# 位置越界狀態上報
if command == 0x07:
if data and len(data) > 0:
self.radar_in_range = (data[0] == 0x01)
if R60ABD1.DEBUG_ENABLED:
status = "in range" if self.radar_in_range else "out of range"
print(f"[Radar] {status}")
# 位置越界狀態查詢響應
elif command == 0x87:
if data and len(data) > 0:
# 解析越界狀態:0x01表示越界
boundary_status = (data[0] == 0x01)
# 更新雷達探測範圍狀態(越界表示不在範圍內)
self.radar_in_range = not boundary_status
# 處理雷達探測範圍查詢響應
if (self._query_in_progress and
self._current_query_type == R60ABD1.TYPE_QUERY_RADAR_RANGE_BOUNDARY and
not self._query_response_received):
# 設置查詢結果為越界狀態(True表示越界)
self._query_result = boundary_status
self._query_response_received = True
if R60ABD1.DEBUG_ENABLED:
status_text = "out of range" if boundary_status else "in range"
print(f"[Query] Radar range boundary response: {status_text}")
# 當前正在進行其他類型的查詢,但收到了雷達範圍響應
elif self._query_in_progress and self._current_query_type != R60ABD1.TYPE_QUERY_RADAR_RANGE_BOUNDARY:
status_text = "out of range" if boundary_status else "in range"
if R60ABD1.DEBUG_ENABLED:
print(
f"[Radar Range] Unexpected query response during {self._current_query_type} query: {status_text}")
# 沒有查詢在進行,但收到了查詢響應
elif not self._query_in_progress:
if R60ABD1.DEBUG_ENABLED:
status_text = "out of range" if boundary_status else "in range"
print(f"[Radar Range] Unsolicited query response: {status_text}")
# 人體存在檢測 (0x80)
elif control == 0x80:
if command == 0x01: # 存在信息
if data and len(data) > 0:
self.presence_status = data[0]
if R60ABD1.DEBUG_ENABLED:
status_text = "No one" if self.presence_status == 0 else "Someone"
print(f"[Presence] {status_text}")
elif command == 0x81: # 存在信息(查詢響應)
if data and len(data) > 0:
presence_value = data[0]
# 更新屬性
self.presence_status = presence_value
# 處理查詢響應
# 情況1:當前正在進行存在信息查詢,且尚未收到響應
if (self._query_in_progress and
self._current_query_type == R60ABD1.TYPE_QUERY_HUMAN_EXISTENCE_INFO and
not self._query_response_received):
self._query_result = presence_value
self._query_response_received = True
if R60ABD1.DEBUG_ENABLED:
status_text = "No one" if presence_value == 0 else "Someone"
print(f"[Query] Presence status response: {status_text}")
# 情況2:當前正在進行其他類型的查詢,但收到了存在信息響應
elif self._query_in_progress and self._current_query_type != R60ABD1.TYPE_QUERY_HUMAN_EXISTENCE_INFO:
status_text = "No one" if presence_value == 0 else "Someone"
print(f"[Presence] Unexpected query response during {self._current_query_type} query: {status_text}")
# 情況3:沒有查詢在進行,但收到了查詢響應
elif not self._query_in_progress:
if R60ABD1.DEBUG_ENABLED:
status_text = "No one" if presence_value == 0 else "Someone"
print(f"[Presence] Unsolicited query response: {status_text}")
# 情況4:其他情況(理論上不應該到達這裏)
else:
if R60ABD1.DEBUG_ENABLED:
status_text = "No one" if presence_value == 0 else "Someone"
print(f"[Presence] Unexpected state in query response handling, query response: {status_text}")
elif command == 0x02: # 運動信息
if data and len(data) > 0:
self.motion_status = data[0]
if R60ABD1.DEBUG_ENABLED:
status_text = ["No motion", "Static", "Active"][
self.motion_status] if self.motion_status < 3 else "Unknown"
print(f"[Motion] {status_text}")
elif command == 0x03: # 體動參數
if data and len(data) > 0:
self.movement_parameter = data[0]
if R60ABD1.DEBUG_ENABLED:
print(f"[Movement] Parameter: {self.movement_parameter}")
elif command == 0x04: # 人體距離
if data and len(data) >= 2:
self.human_distance = (data[0] << 8) | data[1]
if R60ABD1.DEBUG_ENABLED:
print(f"[Distance] {self.human_distance} cm")
elif command == 0x05: # 人體方位
if data and len(data) == 6:
x, y, z = self._parse_human_position_data(data)
self.human_position_x = x
self.human_position_y = y
self.human_position_z = z
if R60ABD1.DEBUG_ENABLED:
print(f"[Position] X={x}, Y={y}, Z={z}")
# 呼吸監測 (0x81)
elif control == 0x81:
if command == 0x01: # 呼吸狀態
if data and len(data) > 0:
self.breath_status = data[0]
if R60ABD1.DEBUG_ENABLED:
status_text = ["Normal", "High", "Low", "None"][
self.breath_status - 1] if 1 <= self.breath_status <= 4 else "Unknown"
print(f"[Breath] Status: {status_text}")
elif command == 0x02: # 呼吸數值
if data and len(data) > 0:
self.breath_value = data[0]
if R60ABD1.DEBUG_ENABLED:
print(f"[Breath] Value: {self.breath_value}")
elif command == 0x05: # 呼吸波形
if data and len(data) == 5:
waveform = self._parse_breath_waveform_data(data)
self.breath_waveform = list(waveform)
if R60ABD1.DEBUG_ENABLED:
print(f"[Breath] Waveform updated: {waveform}")
# 心率監測 (0x85)
elif control == 0x85:
if command == 0x02: # 心率數值
if data and len(data) > 0:
self.heart_rate_value = data[0]
if R60ABD1.DEBUG_ENABLED:
print(f"[Heart Rate] Value: {self.heart_rate_value}")
elif command == 0x05: # 心率波形
if data and len(data) == 5:
waveform = self._parse_heart_rate_waveform_data(data)
self.heart_rate_waveform = list(waveform)
if R60ABD1.DEBUG_ENABLED:
print(f"[Heart Rate] Waveform updated: {waveform}")
# 睡眠監測 (0x84)
elif control == 0x84:
if command == 0x01: # 入牀/離牀狀態
if data and len(data) > 0:
self.bed_status = data[0]
if R60ABD1.DEBUG_ENABLED:
status_text = ["Leave bed", "Enter bed", "None"][
self.bed_status] if self.bed_status < 3 else "Unknown"
print(f"[Bed] Status: {status_text}")
elif command == 0x02: # 睡眠狀態
if data and len(data) > 0:
self.sleep_status = data[0]
if R60ABD1.DEBUG_ENABLED:
status_text = ["Deep sleep", "Light sleep", "Awake", "None"][
self.sleep_status] if self.sleep_status < 4 else "Unknown"
print(f"[Sleep] Status: {status_text}")
elif command == 0x03: # 清醒時長
if data and len(data) >= 2:
self.awake_duration = (data[0] << 8) | data[1]
if R60ABD1.DEBUG_ENABLED:
print(f"[Sleep] Awake duration: {self.awake_duration} min")
elif command == 0x04: # 淺睡時長
if data and len(data) >= 2:
self.light_sleep_duration = (data[0] << 8) | data[1]
if R60ABD1.DEBUG_ENABLED:
print(f"[Sleep] Light sleep duration: {self.light_sleep_duration} min")
elif command == 0x05: # 深睡時長
if data and len(data) >= 2:
self.deep_sleep_duration = (data[0] << 8) | data[1]
if R60ABD1.DEBUG_ENABLED:
print(f"[Sleep] Deep sleep duration: {self.deep_sleep_duration} min")
elif command == 0x06: # 睡眠質量評分
if data and len(data) > 0:
self.sleep_quality_score = data[0]
if R60ABD1.DEBUG_ENABLED:
print(f"[Sleep] Quality score: {self.sleep_quality_score}")
elif command == 0x0C: # 睡眠綜合狀態
if data and len(data) == 8:
comprehensive_data = self._parse_sleep_comprehensive_data(data)
# 更新到字典屬性
self.sleep_comprehensive_status = {
'presence': comprehensive_data[0],
'sleep_status': comprehensive_data[1],
'avg_breath': comprehensive_data[2],
'avg_heart_rate': comprehensive_data[3],
'turnover_count': comprehensive_data[4],
'large_movement_ratio': comprehensive_data[5],
'small_movement_ratio': comprehensive_data[6],
'apnea_count': comprehensive_data[7]
}
if R60ABD1.DEBUG_ENABLED:
print(f"[Sleep] Comprehensive status updated")
elif command == 0x0D: # 睡眠質量分析/統計信息
if data and len(data) == 12:
stats_data = self._parse_sleep_statistics_data(data)
# 更新對應的睡眠統計屬性
self.sleep_quality_score = stats_data[0]
if R60ABD1.DEBUG_ENABLED:
# 注意:stats_data[1]是總睡眠時長,需要根據實際情況決定如何分配
print(f"[Sleep] Statistics updated")
elif command == 0x0E: # 睡眠異常
if data and len(data) > 0:
self.sleep_anomaly = data[0]
if R60ABD1.DEBUG_ENABLED:
status_text = ["Short sleep (<4h)", "Long sleep (>12h)", "No person anomaly", "Normal"][
self.sleep_anomaly] if self.sleep_anomaly < 4 else "Unknown"
print(f"[Sleep] Anomaly: {status_text}")
elif command == 0x10: # 睡眠質量評級
if data and len(data) > 0:
self.sleep_quality_rating = data[0]
if R60ABD1.DEBUG_ENABLED:
status_text = ["None", "Good", "Normal", "Poor"][
self.sleep_quality_rating] if self.sleep_quality_rating < 4 else "Unknown"
print(f"[Sleep] Quality rating: {status_text}")
elif command == 0x11: # 異常掙扎狀態
if data and len(data) > 0:
self.abnormal_struggle_status = data[0]
if R60ABD1.DEBUG_ENABLED:
status_text = ["None", "Normal", "Abnormal"][
self.abnormal_struggle_status] if self.abnormal_struggle_status < 3 else "Unknown"
print(f"[Sleep] Struggle status: {status_text}")
elif command == 0x12: # 無人計時狀態
if data and len(data) > 0:
self.no_person_timing_status = data[0]
if R60ABD1.DEBUG_ENABLED:
status_text = ["None", "Normal", "Abnormal"][
self.no_person_timing_status] if self.no_person_timing_status < 3 else "Unknown"
print(f"[Sleep] No person timing: {status_text}")
def close(self):
_"""_
_ 停止定時器,解析剩餘數據幀,輸出統計信息_
_ """_
_ _# 停止定時器
self._is_running = False
self.timer.deinit()
# 是否有查詢在進行中
self._query_in_progress = False
# 是否收到查詢響應
self._query_response_received = False
# 查詢結果
self._query_result = None
# 當前查詢類型
self._current_query_type = None
# 解析剩餘數據幀
try:
frames = self.data_processor.read_and_parse()
for frame in frames:
self.update_properties_from_frame(frame)
except Exception as e:
raise Exception(f"Failed to deinitialize timer: {str(e)}")
# 獲取並輸出統計信息
try:
stats = self.data_processor.get_stats()
if R60ABD1.DEBUG_ENABLED:
print(" [R60ABD1] Final statistics: %s" % format_time())
print(" Total bytes received: %d" % stats['total_bytes_received'])
print(" Total frames parsed: %d" % stats['total_frames_parsed'])
print(" CRC errors: %d" % stats['crc_errors'])
print(" Frame errors: %d" % stats['frame_errors'])
print(" Invalid frames: %d" % stats['invalid_frames'])
except Exception as e:
raise Exception(f"Failed to get statistics: {str(e)}")
# 清空緩衝區
try:
self.data_processor.clear_buffer()
except Exception as e:
raise Exception(f"Failed to clear buffer: {str(e)}")
if R60ABD1.DEBUG_ENABLED:
print("%s [R60ABD1] Resources fully released" % format_time())
對應相關測試的 main.py 文件代碼如下所示:
# Python env :
# -*- coding: utf-8 -*-
# @Time : 2025/11/4 下午5:33
# @Author : 李清水
# @File : main.py
# @Description :
from machine import UART, Pin, Timer
import time
from data_flow_processor import DataFlowProcessor
from r60abd1 import R60ABD1, format_time
time.sleep(3)
# 初始化UART0:TX=16, RX=17,波特率115200
uart = UART(0, baudrate=115200, tx=Pin(16), rx=Pin(17), timeout=0)
# 創建DataFlowProcessor實例
processor = DataFlowProcessor(uart)
# 創建R60ABD1實例
device = R60ABD1(processor, parse_interval=50)
# ======================================== 功能函數 ============================================
def print_sensor_data():
_"""打印傳感器數據到Thonny控制枱"""_
_ _print("=" * 50)
print("%s Sensor Data" % format_time())
print("=" * 50)
# 心率數據
print("Heart Rate: %d bpm" % device.heart_rate_value)
print("Heart Rate Waveform: %s" % str(device.heart_rate_waveform))
# 呼吸數據
print("Breath Rate: %d bpm" % device.breath_value)
print("Breath Status: %d" % device.breath_status)
print("Breath Waveform: %s" % str(device.breath_waveform))
# 人體存在數據
print("Movement Parameter: %d" % device.movement_parameter)
print("Presence Status: %s" % ("Someone" if device.presence_status == 1 else "No one"))
print("Motion Status: %s" % ["No motion", "Static", "Active"][
device.motion_status] if device.motion_status < 3 else "Unknown")
# 距離和位置
print("Human Distance: %d cm" % device.human_distance)
print("Human Position: X=%d, Y=%d, Z=%d" % (
device.human_position_x, device.human_position_y, device.human_position_z))
# 雷達狀態
print("Radar in Range: %s" % ("Yes" if device.radar_in_range else "No"))
print("=" * 50)
# ======================================== 主程序 ============================================
# 上次打印時間
last_print_time = time.ticks_ms()
print_interval = 2000 # 2秒打印一次
success, product_model = device.query_product_model()
if success:
print("Product Model: %s" % product_model)
else:
print("Query Product Model failed")
success, product_id = device.query_product_id()
if success:
print("Product ID: %s" % product_id)
else:
print("Query Product ID failed")
success, hardware_model = device.query_hardware_model()
if success:
print("Hardware Model: %s" % hardware_model)
else:
print("Query Hardware Model failed")
success, firmware_version = device.query_firmware_version()
if success:
print("Hardware Version: %s" % firmware_version)
else:
print("Query Hardware Version failed")
success, init_status = device.query_init_complete()
if success:
print("Init Status: %s" % init_status)
else:
print("Query Init Status failed")
success, boundary_status = device.query_radar_range_boundary()
if success:
status_text = "out of range" if boundary_status else "in range"
print("Boundary Status: %s" % status_text)
else:
print("Query Boundary Status failed")
try:
while True:
current_time = time.ticks_ms()
# 定期打印傳感器數據
if time.ticks_diff(current_time, last_print_time) >= print_interval:
# print_sensor_data()
success, presence_status = device.query_presence_status()
if success:
print("Presence Status: %s" % ("Someone" if presence_status == 1 else "No one"))
else:
print("Query Presence Status failed")
last_print_time = current_time
success, heartbeat_status = device.query_heartbeat()
if success:
print("Heartbeat Status: %s" % ("Normal" if heartbeat_status == 1 else "Abnormal"))
else:
print("Query Heartbeat failed")
# 小延遲,避免佔用太多CPU
time.sleep_ms(10)
except KeyboardInterrupt:
print("%s Program interrupted by user" % format_time())
finally:
# 清理資源
print("%s Cleaning up resources..." % format_time())
# 停止實例運行
device.close()
# 銷燬實例
del device
print("%s Program exited" % format_time())
為驗證功能的可用性,在測試前我們先關閉人體存在、心率、呼吸、睡眠的主動上報功能。
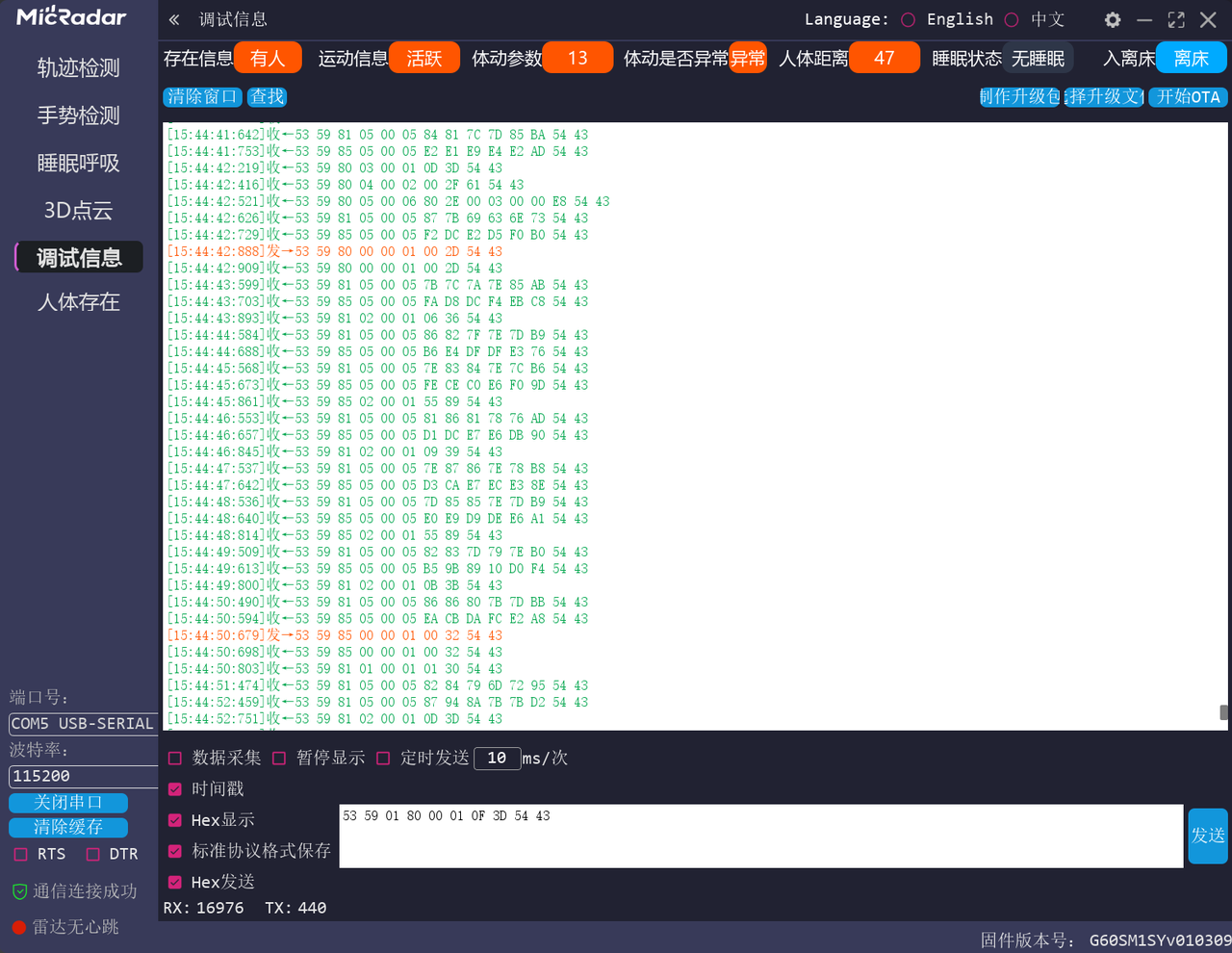
在 REPL 中依次調用 query_product_model、query_heartbeat、query_radar_range_boundary 等方法,驗證返回結果與設備實際狀態一致(如 query_product_model 返回 R60ASM1,query_heartbeat 返回 (True, True))。
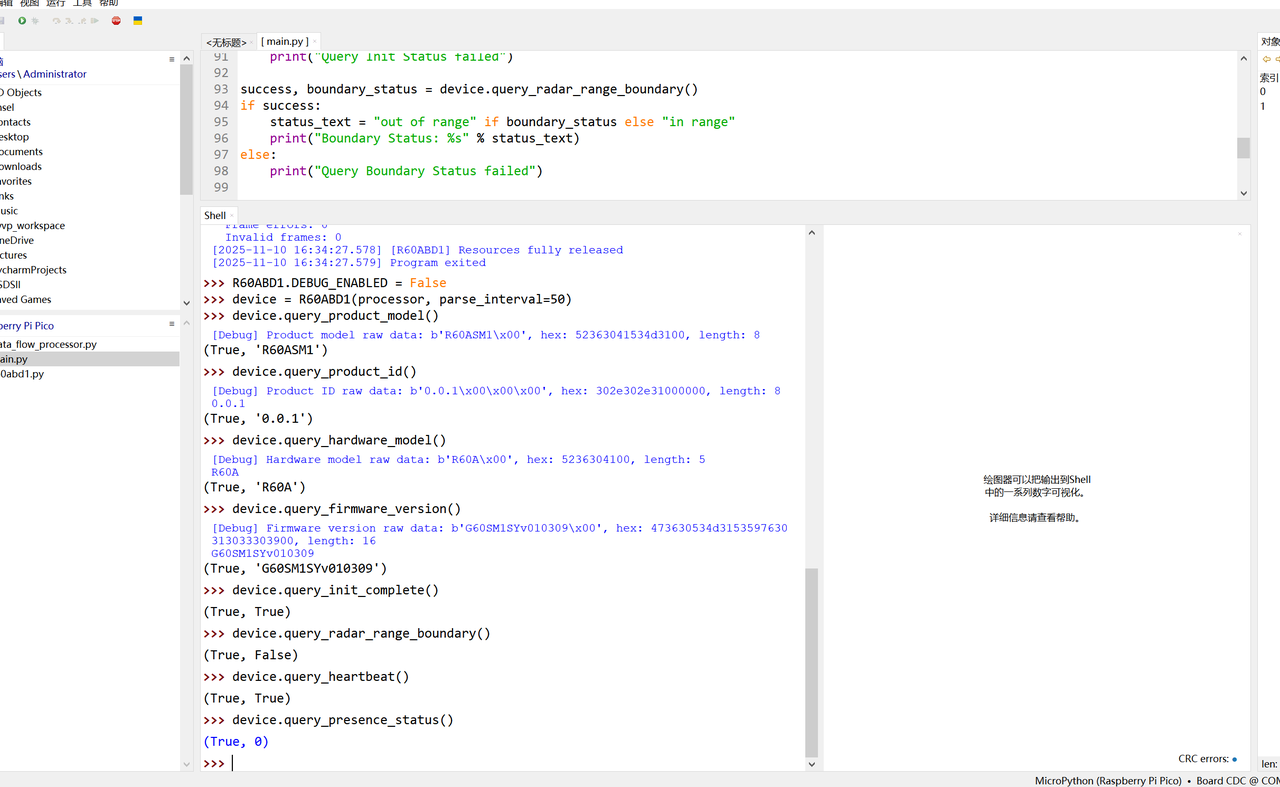
然後再將所有主動上報功能都打開,同時調用 query_firmware_version 等查詢方法,驗證在有多個主動上報數據情況下,能不能正確處理被動響應的數據幀:
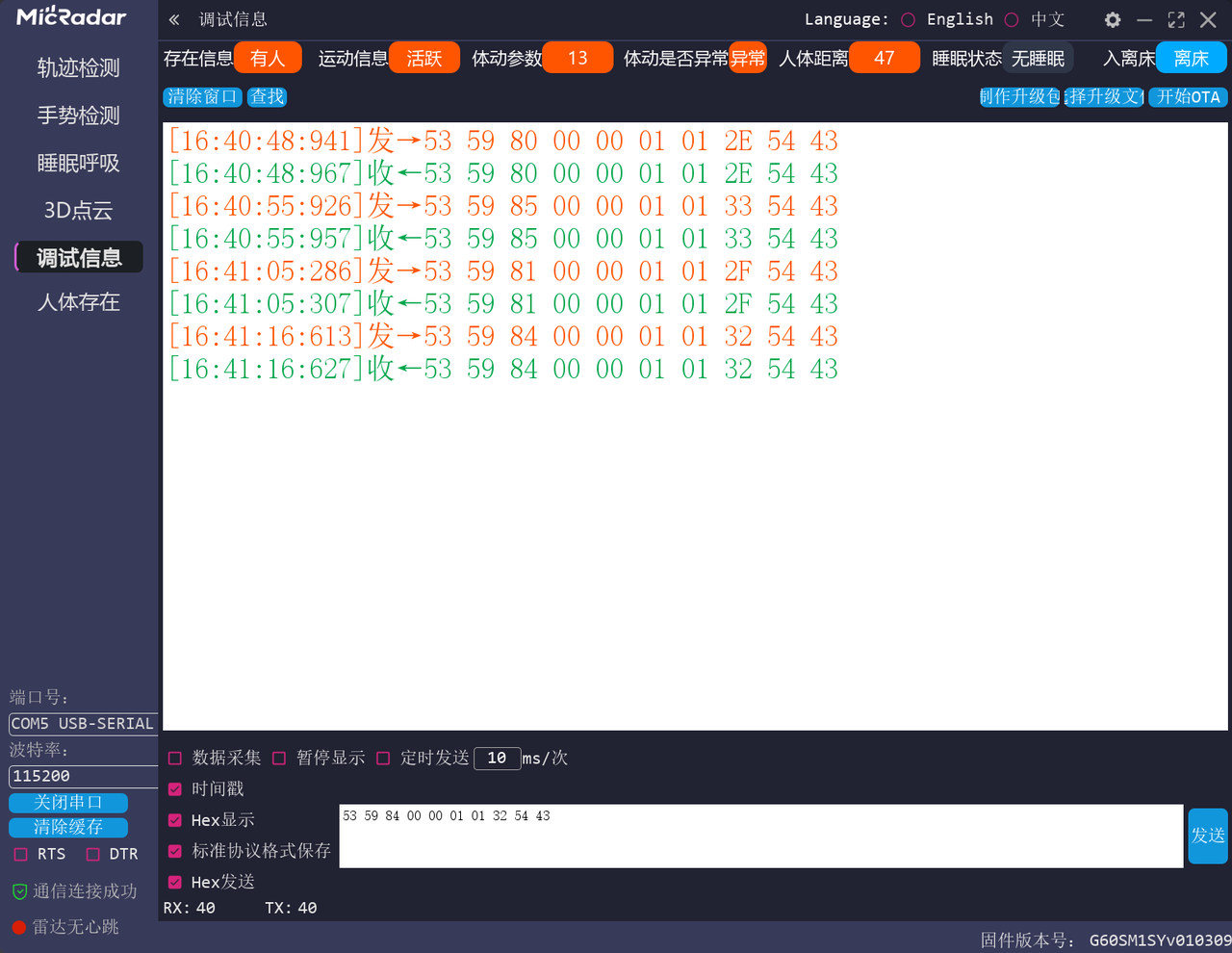

觀察 main.py 輸出,確認主動上報數據(如心率波形、呼吸狀態)正常解析的同時,查詢指令能返回正確結果(如固件版本 G60SM1SYv010309)。
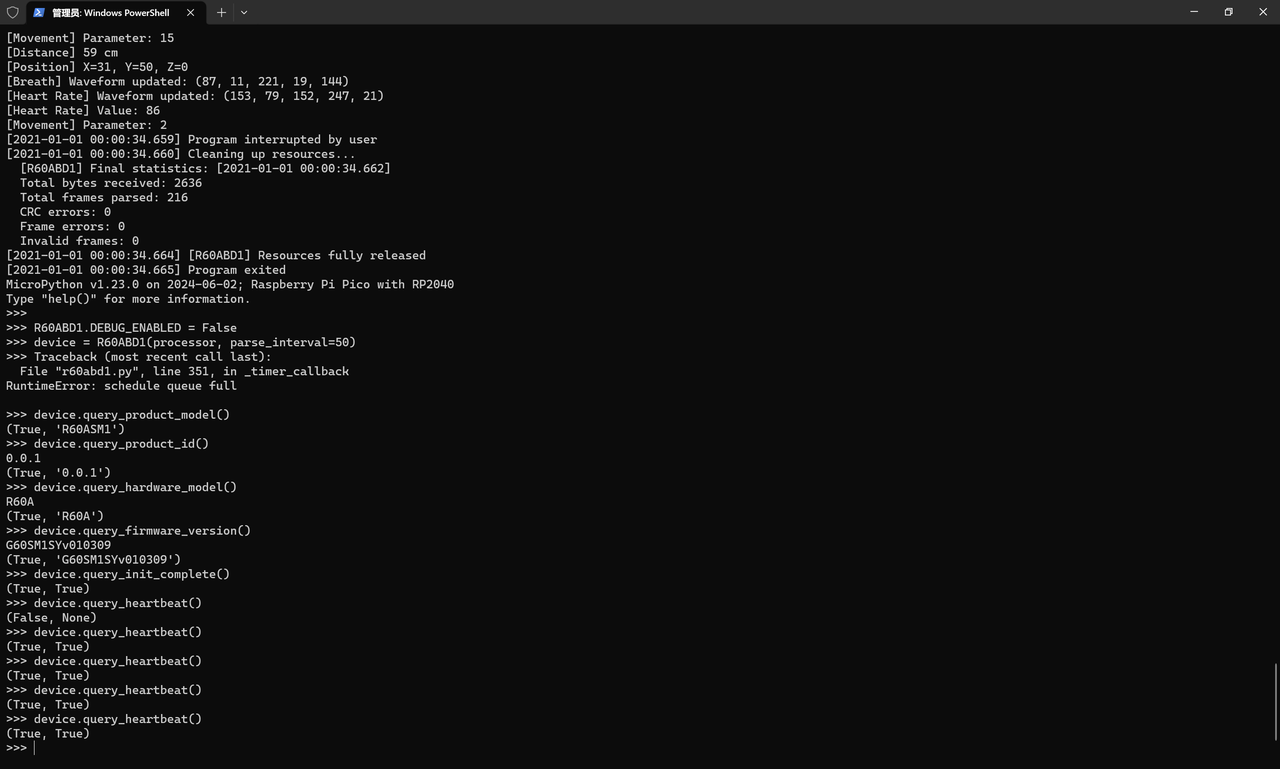
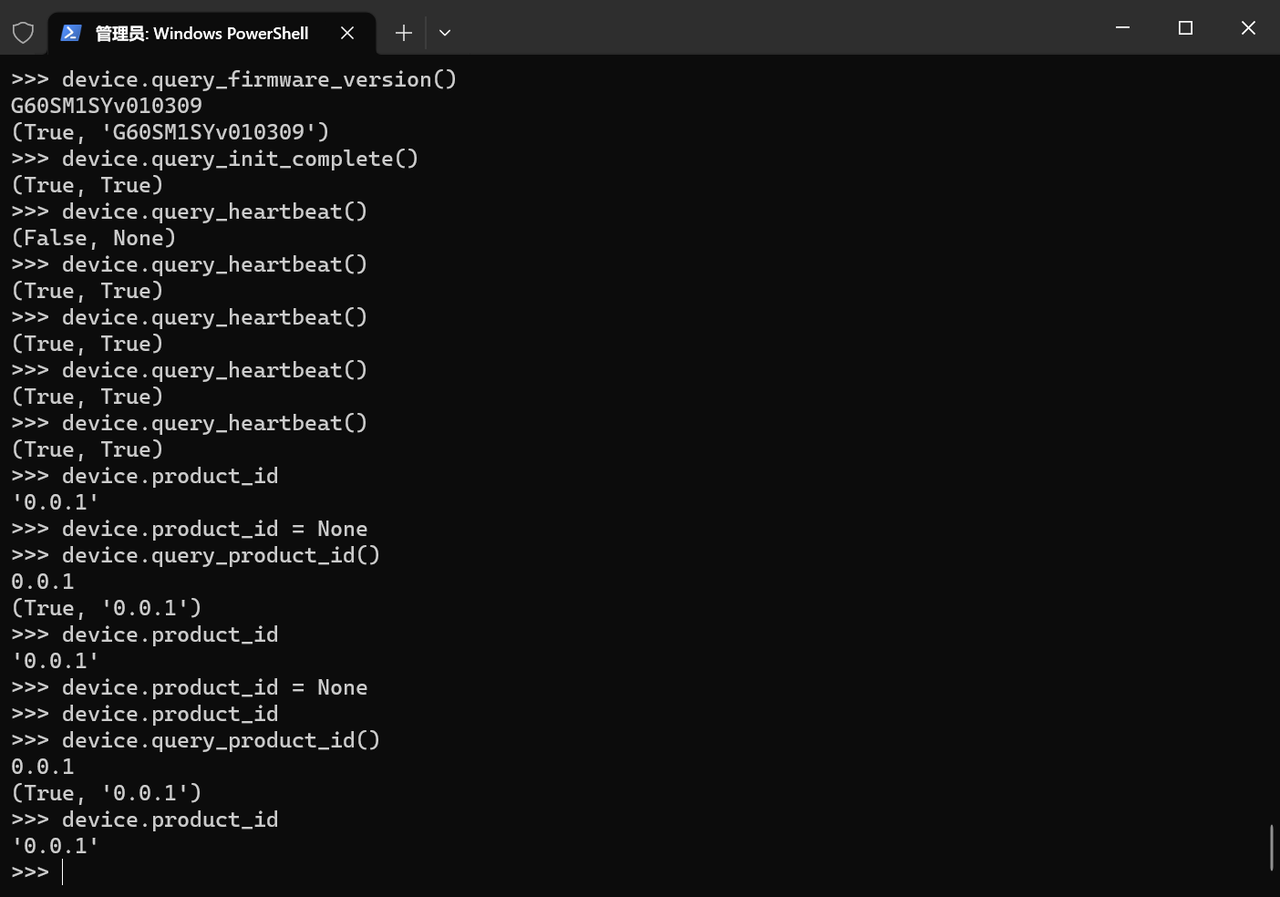
3.3.7 業務驅動層的重構:幀封裝、指令解耦與響應統一化
隨着雷達功能的逐步豐富(從基礎心跳監測到人體存在、心率、呼吸、睡眠等多維度監測),原有業務驅動類的代碼結構逐漸暴露短板:幀構建邏輯在數十個查詢 / 設置方法中重複出現,指令類型與底層協議數值(控制字、命令字)強耦合,不同指令的響應處理邏輯存在大量冗餘。這些問題導致代碼維護成本陡增 —— 新增一個指令需重複編寫幀構建與響應處理代碼,修改協議參數需全局搜索硬編碼的十六進制數值,極易引發遺漏或錯誤。
為解決上述問題,我們採用 “統一幀封裝 + 指令映射解耦 + 響應邏輯歸一化” 的三層重構策略,將業務驅動層從 “過程式堆砌” 升級為 “模塊化設計”,顯著提升了代碼的可維護性、可擴展性與可靠性。
3.3.7.1 幀發送的統一封裝
在重構前,每個查詢 / 設置方法(如 query_heartbeat、reset_module)都需獨立構建數據幀,包含幀頭拼接、長度計算、CRC 校驗、幀尾添加等重複邏輯。這種分散式實現不僅導致代碼冗餘(重複代碼佔比超 40%),還因手工計算長度、CRC 等操作易引發協議錯誤(如長度字節與實際數據長度不匹配、CRC 校驗失敗導致設備拒收)。
將幀構建的全流程封裝到 DataFlowProcessor 類的 build_and_send_frame 方法中,實現從 “參數輸入” 到 “幀發送” 的自動化處理。該方法的核心邏輯如下:
def build_and_send_frame(self, control_byte, command_byte, data=b''):
# 幀頭(協議固定為0x53 0x59)
header = self.HEADER # 類常量,如b'\x53\x59'
# 控制字、命令字轉換為單字節
control = bytes([control_byte])
command = bytes([command_byte])
# 數據長度(按協議要求採用大端格式,2字節)
data_len = len(data)
length_bytes = bytes([(data_len >> 8) & 0xFF, data_len & 0xFF]) # 高位在前,低位在後
# 組裝幀主體(幀頭+控制字+命令字+長度+數據)
frame_without_crc = header + control + command + length_bytes + data
# 計算CRC校驗(協議規定為幀主體所有字節之和的低8位)
crc = self._calculate_crc(frame_without_crc) # 內部調用sum(frame_without_crc) & 0xFF
# 幀尾(協議固定為0x54 0x43)
trailer = self.TRAILER # 類常量,如b'\x54\x43'
# 完整幀拼接併發送
complete_frame = frame_without_crc + bytes([crc]) + trailer
self.uart.write(complete_frame) # 通過串口發送
return complete_frame # 返回完整幀用於調試
3.3.7.2 指令映射表:COMMAND_MAP 的解耦設計
重構前,指令類型(如 “查詢產品型號”“打開心率監測”)與底層協議數值(控制字、命令字)直接耦合。例如,“查詢產品型號” 的控制字 0x02、命令字 0xA1 直接硬編碼在 query_product_model 方法中。這種設計導致:
- 新增指令需重複編寫幀參數;
- 協議更新時(如命令字變更)需全局修改所有關聯方法,極易遺漏;
- 代碼可讀性差(十六進制數值難以直觀理解其含義)。
設計 COMMAND_MAP 字典,將 “指令類型常量” 與 “幀參數(控制字、命令字、默認數據)” 建立映射關係,實現邏輯與數值的解耦。其核心結構如下:
# 指令類型常量(直觀描述操作含義)
TYPE_QUERY_HEARTBEAT = 0 # 心跳包查詢
TYPE_QUERY_PRODUCT_MODEL = 2 # 產品型號查詢
TYPE_CONTROL_HEART_RATE_MONITOR_ON = 16 # 打開心率監測
# 指令映射表(關聯常量與協議參數)
COMMAND_MAP = {
TYPE_QUERY_HEARTBEAT: {
'control_byte': 0x01, # 控制字(系統指令)
'command_byte': 0x80, # 命令字(心跳查詢)
'data': bytes([0x0F]) # 默認數據(協議固定)
},
TYPE_QUERY_PRODUCT_MODEL: {
'control_byte': 0x02, # 控制字(產品信息)
'command_byte': 0xA1, # 命令字(型號查詢)
'data': bytes([0x0F]) # 默認數據
},
TYPE_CONTROL_HEART_RATE_MONITOR_ON: {
'control_byte': 0x85, # 控制字(心率監測)
'command_byte': 0x00, # 命令字(功能開關)
'data': bytes([0x01]) # 數據(1表示打開)
},
# ... 其他指令映射 ...
}
3.3.7.3 查詢響應邏輯的統一化:_handle_query_response 方法
重構前,update_properties_from_frame 方法中,不同指令的響應處理邏輯高度重複。例如,“心跳查詢響應”“產品型號查詢響應” 均需判斷三種場景:
- 響應與當前查詢匹配;
- 響應與當前查詢不匹配(併發衝突);
- 無查詢時收到響應(主動上報)。
這種重複導致代碼冗長(單方法超 1000 行),且不同指令的場景判斷邏輯可能存在差異(如部分指令遺漏異常響應處理),隱藏潛在 Bug。
提取 _handle_query_response 方法,將三種響應場景的處理邏輯抽象為通用邏輯,通過參數化適配不同指令。其核心實現如下:
def _handle_query_response(self, expected_type, response_data, response_name):
# 場景1:響應與當前查詢類型匹配(正常流程)
if (self._query_in_progress and # 存在正在進行的查詢
self._current_query_type == expected_type and # 響應類型匹配
not self._query_response_received): # 尚未收到響應
self._query_result = response_data # 記錄結果
self._query_response_received = True # 標記響應已收到
if R60ABD1.DEBUG_ENABLED:
query_name = self.QUERY_NAME_MAP.get(expected_type, f"Unknown({expected_type})")
print(f"[Query] {query_name} response received: {response_data}")
# 場景2:響應與當前查詢類型不匹配(併發衝突)
elif self._query_in_progress and self._current_query_type != expected_type:
if R60ABD1.DEBUG_ENABLED:
current_query = self.QUERY_NAME_MAP.get(self._current_query_type, f"Unknown({self._current_query_type})")
print(f"[Query] Unexpected {response_name} response during {current_query} query: {response_data}")
# 場景3:無查詢時收到響應(設備主動上報)
elif not self._query_in_progress:
if R60ABD1.DEBUG_ENABLED:
print(f"[Query] Unsolicited {response_name} response: {response_data}")
在 update_properties_from_frame 中,只需通過一行代碼調用該方法即可完成響應處理,例如:
# 產品型號查詢響應處理(重構後)
if control == 0x02 and command == 0xA1 and data:
product_model = self._parse_product_info_data(data)[0]
self.product_model = product_model # 更新屬性
self._handle_query_response(
expected_type=TYPE_QUERY_PRODUCT_MODEL,
response_data=product_model,
response_name="Product Model"
)
3.3.7.4 重構後的測試驗證
這裏,我們需要驗證重構後的代碼在設備主動上報數據時,能否同時正常處理查詢指令。
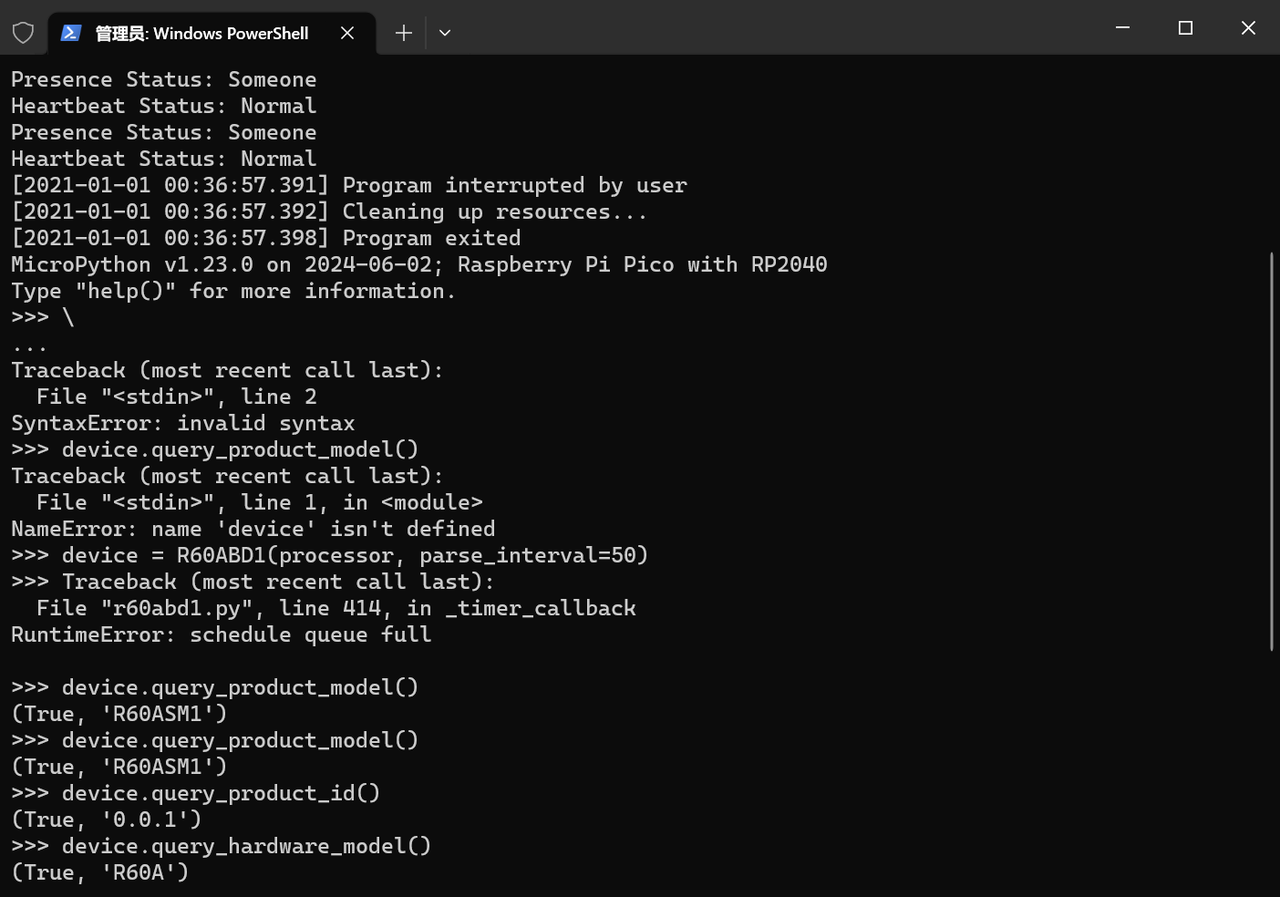
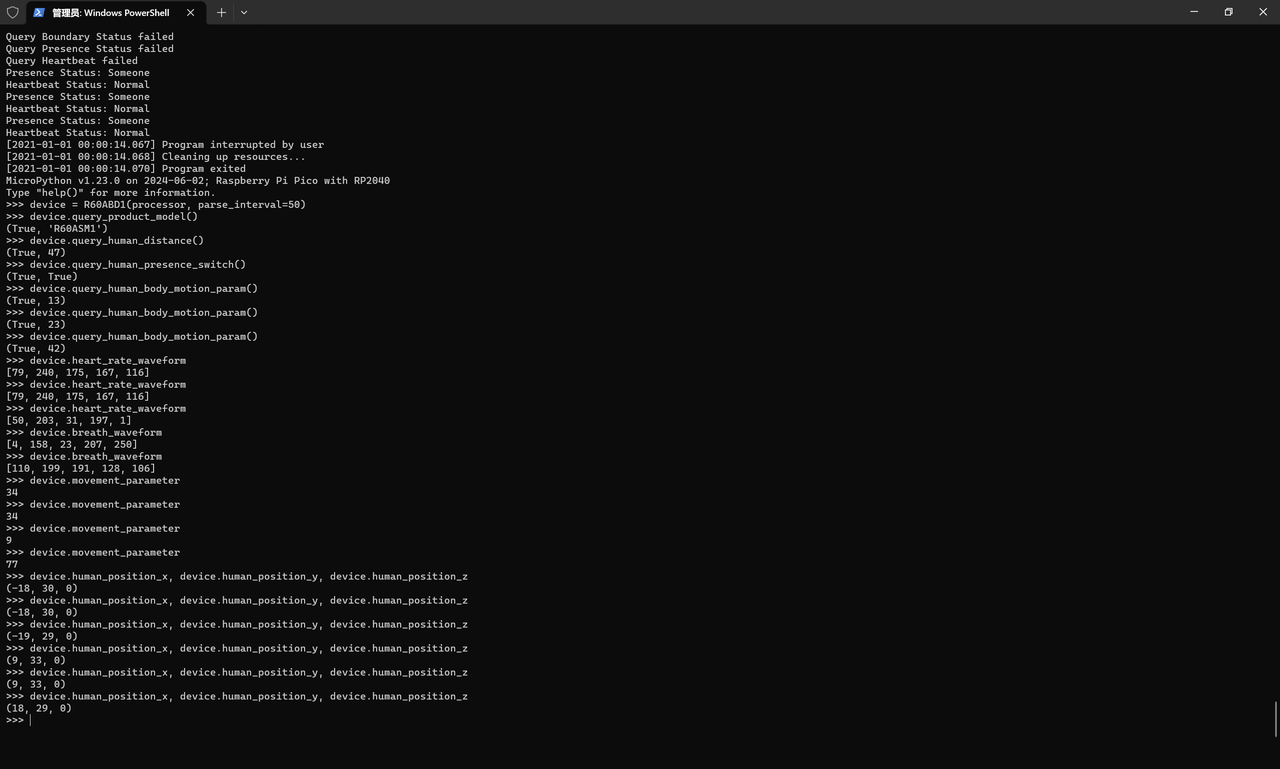
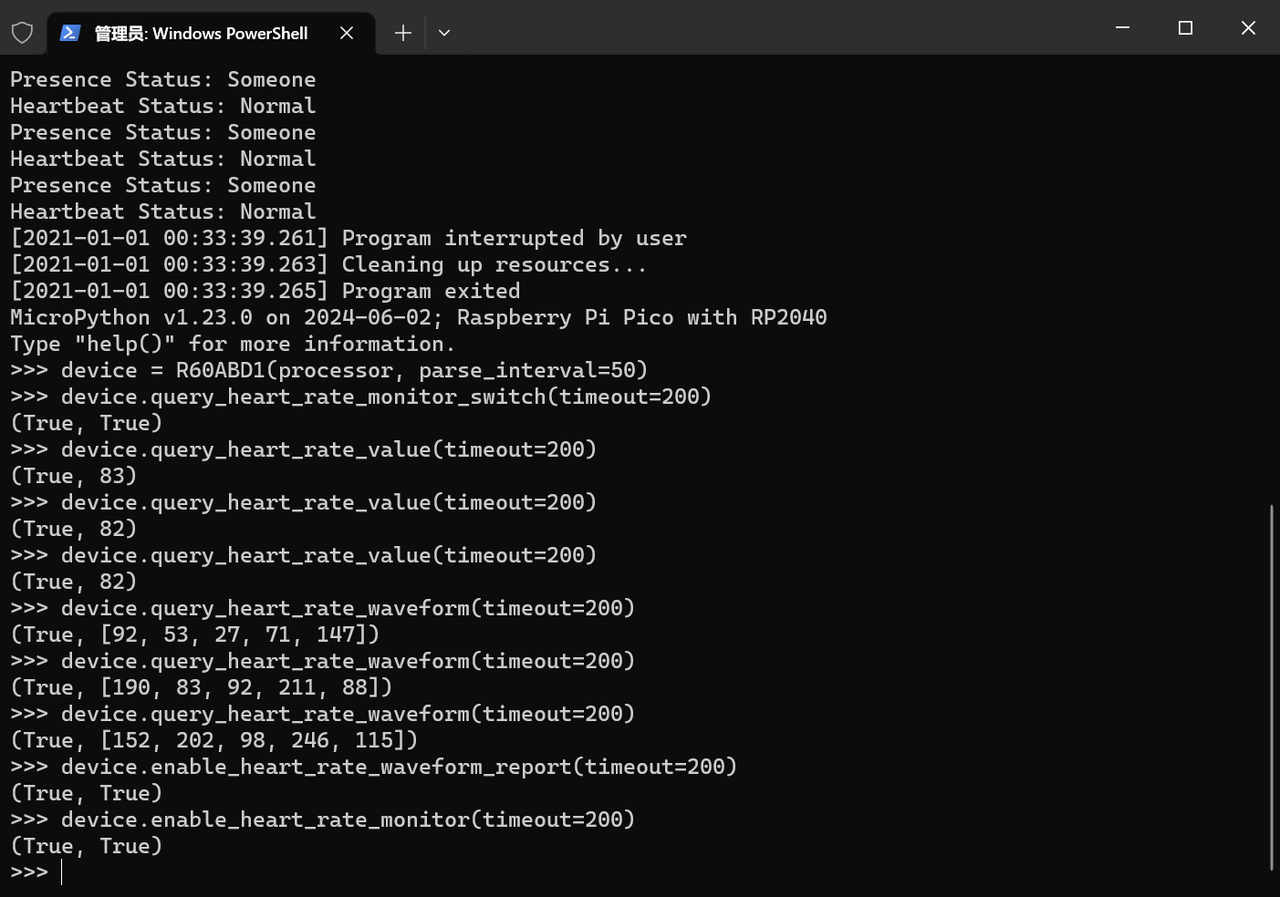
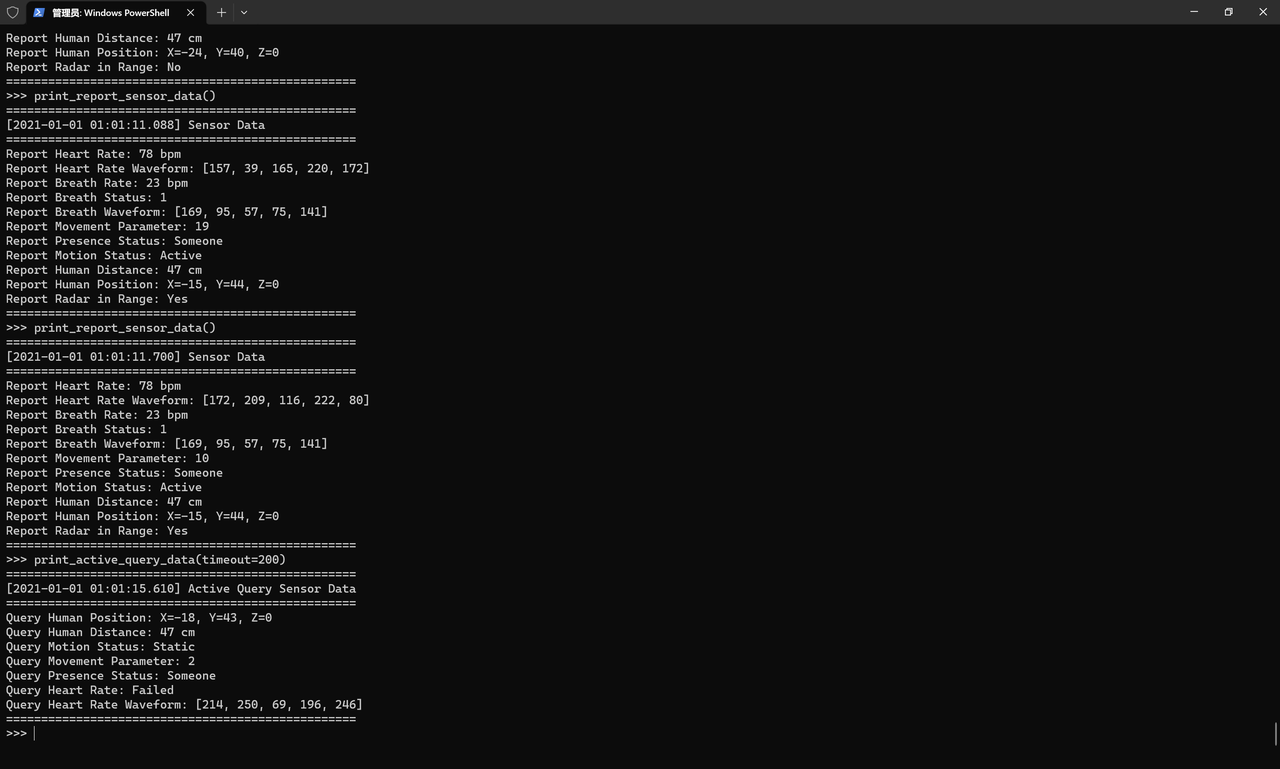
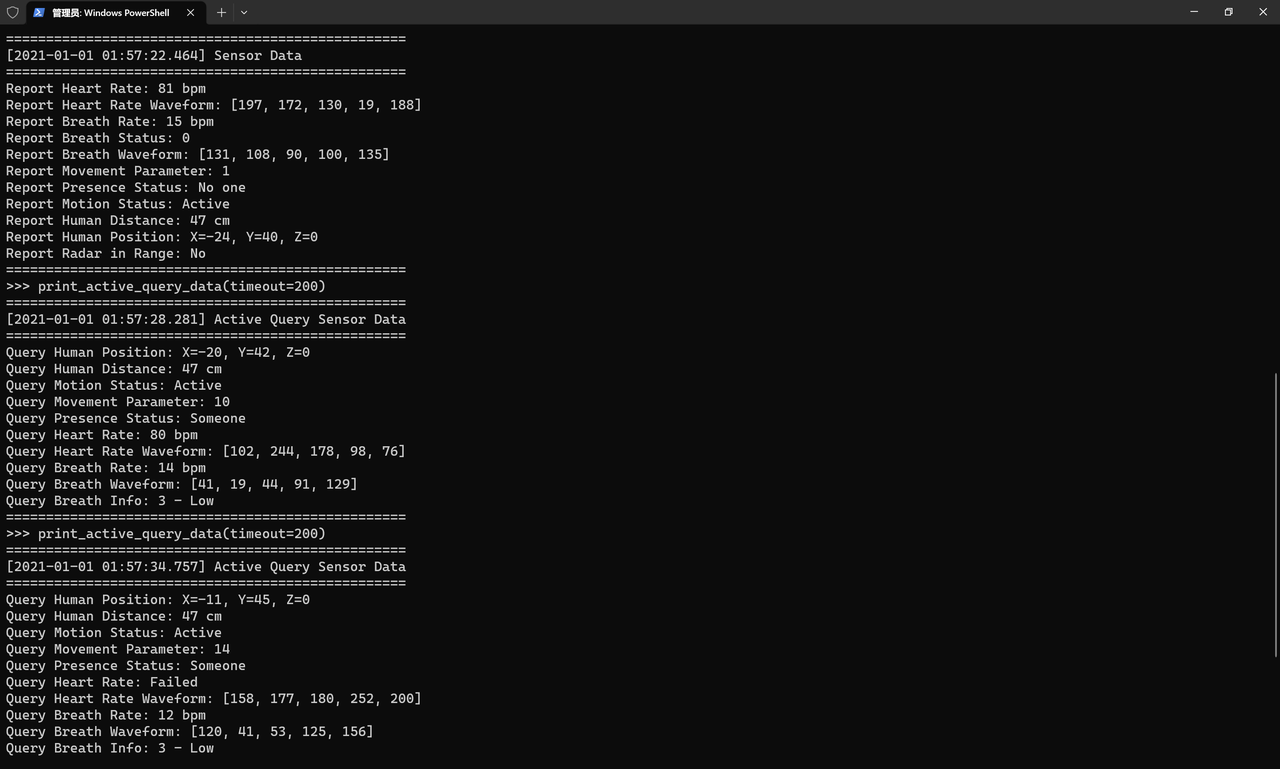
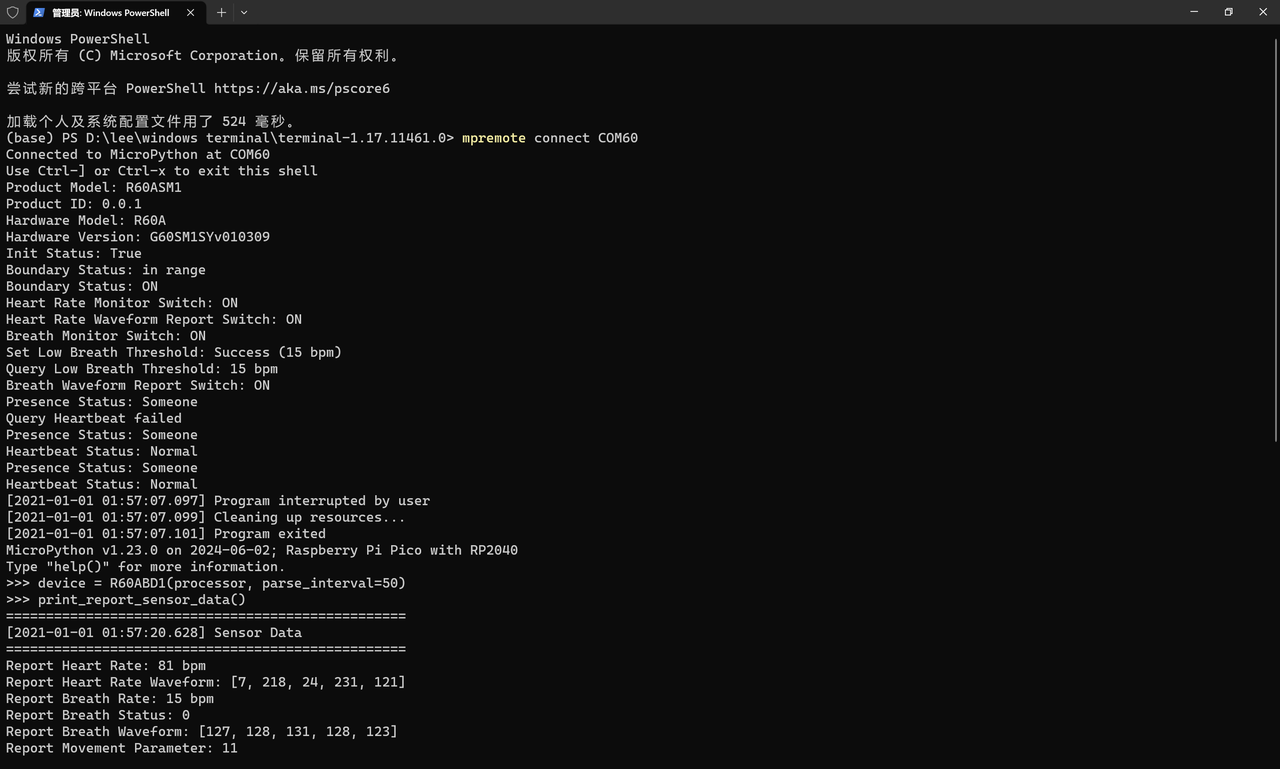
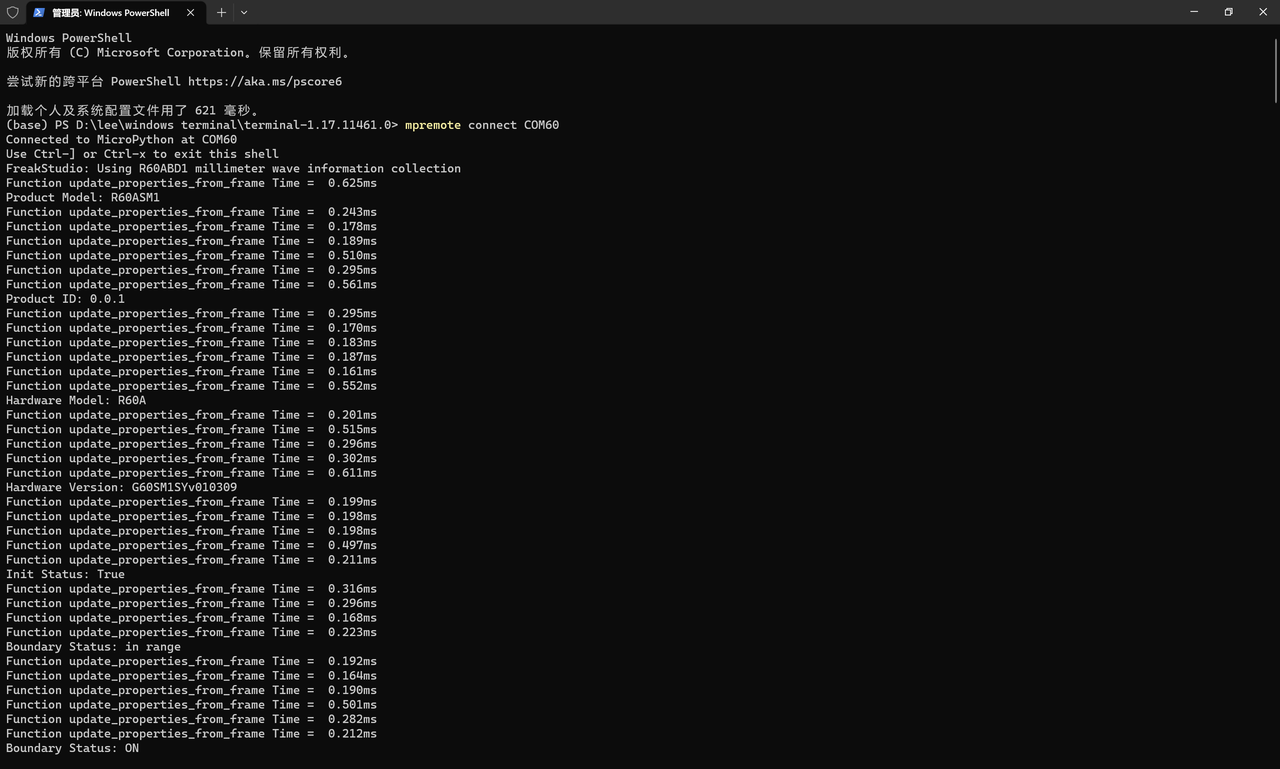
可以看到測試無誤。
3.3.7.5 業務驅動層的屬性更新嚴格遵循 “單一數據源 + 響應驅動” 原則
業務驅動層的屬性更新必須堅守 “單一數據源” 與 “響應驅動” 雙重核心:單一數據源限定為雷達設備返回的真實響應數據,響應驅動要求所有屬性修改僅在update_properties_from_frame方法解析設備響應時執行,上層查詢 / 控制方法(如 enable_human_presence、query_human_distance)僅負責發送指令,不得基於 “指令發送成功” 等本地邏輯預判結果或修改屬性,從根源避免狀態不一致問題。
錯誤示例如下,上層控制方法會在指令發送成功後,未經設備響應確認就主動修改屬性,例如:
def enable_human_presence(self, timeout=200):
success, result = self._execute_operation(R60ABD1.TYPE_CONTROL_HUMAN_PRESENCE_ON, timeout=timeout)
if success: # 僅判斷指令發送成功,未等設備響應確認
self.presence_enabled = True # 預判修改屬性,存在風險
return success, result
這種設計的問題在於:“指令發送成功” 不代表設備已實際執行(如設備硬件故障、指令接收成功但執行失敗),此時 presence_enabled=True 的本地狀態與設備真實狀態可能不一致,且會與 update_properties_from_frame 中基於設備響應的屬性修改形成衝突,破壞數據唯一性。
對於控制類方法而言,上層控制方法徹底剝離屬性修改邏輯,僅專注於指令發送,所有狀態更新依賴設備響應:
def enable_human_presence(self, timeout=200):
# 僅發送“打開人體存在”指令,不修改任何屬性
return self._execute_operation(R60ABD1.TYPE_CONTROL_HUMAN_PRESENCE_ON, timeout=timeout)
def disable_human_presence(self, timeout=200):
# 僅發送“關閉人體存在”指令,不預判執行結果
return self._execute_operation(R60ABD1.TYPE_CONTROL_HUMAN_PRESENCE_OFF, timeout=timeout)
屬性更新的唯一入口在 update_properties_from_frame 解析設備響應時:
# 人體存在開關控制響應解析(唯一屬性修改點)
if control == 0x80 and command == 0x00 and data:
switch_status = (data[0] == 0x01) # 以設備響應數據為唯一依據
self.presence_enabled = switch_status # 僅在此處修改屬性
# 匹配響應與操作類型,更新查詢結果
if data[0] == 0x01:
self._handle_query_response(R60ABD1.TYPE_CONTROL_HUMAN_PRESENCE_ON, True, "Human Presence ON")
else:
self._handle_query_response(R60ABD1.TYPE_CONTROL_HUMAN_PRESENCE_OFF, True, "Human Presence OFF")
查詢類方法同樣遵循 “不修改屬性” 原則,僅通過 _execute_operation 發送查詢指令,屬性更新由設備響應解析驅動,例如:
def query_human_distance(self, timeout=200):
# 僅發送“人體距離查詢”指令,不處理屬性更新
return self._execute_operation(R60ABD1.TYPE_QUERY_HUMAN_DISTANCE, timeout=timeout)
當設備返回距離查詢響應時,update_properties_from_frame 解析數據並更新屬性,同時通過 _handle_query_response 同步查詢結果:
# 人體距離查詢響應解析(唯一屬性修改點)
if control == 0x80 and command == 0x84 and data and len(data) >= 2:
distance = (data[0] << 8) | data[1] # 解析設備響應的真實距離數據
self.human_distance = distance # 僅在此處修改屬性
self._handle_query_response(
R60ABD1.TYPE_QUERY_HUMAN_DISTANCE,
distance,
"Human Distance"
)
該原則的核心價值在於:確保本地屬性狀態與雷達設備真實狀態完全同步,避免 “本地預判” 與 “設備實際” 的偏差;同時通過屬性修改的唯一入口,讓狀態變化可追溯(每一次屬性更新都對應明確的設備響應),為後續狀態監控、異常告警等功能提供可靠的數據基礎。
四、驅動代碼整合優化與相關測試
驅動代碼的整合核心是實現 “配置化初始化、全流程容錯、可追溯測試”,通過優化初始化方法的參數設計、強化異常處理機制、完善測試腳本覆蓋,確保驅動類的可靠性、易用性與低資源佔用特性。以下從初始化優化、測試腳本實現、性能分析三方面展開説明。
4.1 初始化方法的優化設計:配置化、容錯性與可追溯性
原初始化方法存在 “功能配置固化、異常處理薄弱、狀態追溯困難” 等問題,優化後的初始化方法以 “參數化配置、全流程重試、錯誤可追溯” 為核心,支持雷達所有功能的靈活配置,並通過異常機制與重試邏輯提升初始化成功率。
4.1.1 核心優化點與設計原則
這裏,我們首先需要在初始化方法中增加一些可配置參數,覆蓋雷達所有核心功能,支持開發者根據業務需求靈活開關功能、調整參數,無需修改底層代碼:
- 功能開關類:心率波形上報、呼吸波形上報、異常掙扎監測、無人計時等;
- 參數配置類:掙扎靈敏度(低 / 中 / 高)、無人計時時長(30-180 分鐘)、睡眠截止時長(5-120 分鐘)等;
- 容錯控制類:最大重試次數(0-10 次)、重試延遲(0-1000ms)、初始化超時(1-30 秒)等。
常見示例如下:
# 全功能開啓,高實時性配置
device = R60ABD1(
processor,
parse_interval=50, # 高實時性,50ms解析一次
presence_enabled=True,
heart_rate_enabled=True,
heart_rate_waveform_enabled=True, # 開啓心率波形上報
breath_monitoring_enabled=True,
breath_waveform_enabled=True, # 開啓呼吸波形上報
sleep_monitoring_enabled=True,
abnormal_struggle_enabled=True, # 開啓異常掙扎監測
struggle_sensitivity=1, # 中等靈敏度
no_person_timing_enabled=True, # 開啓無人計時
no_person_timing_duration=60, # 無人計時60分鐘
sleep_cutoff_duration=120, # 睡眠截止時長120分鐘
max_retries=3, # 最大重試3次
retry_delay=200, # 重試延遲200ms
init_timeout=10000 # 初始化超時10秒
)
# 低功耗配置,關閉非必要功能
device = R60ABD1(
processor,
parse_interval=200, # 低頻率解析,降低功耗
presence_enabled=True,
heart_rate_enabled=True,
heart_rate_waveform_enabled=False, # 關閉心率波形(減少數據傳輸)
breath_monitoring_enabled=True,
breath_waveform_enabled=False, # 關閉呼吸波形
sleep_monitoring_enabled=True,
abnormal_struggle_enabled=False, # 關閉異常掙扎監測
no_person_timing_enabled=False, # 關閉無人計時
max_retries=2,
retry_delay=100,
init_timeout=5000
)
所有參數均添加嚴格的合法性校驗(通過 _validate_init_parameters 方法),例如:
- 解析間隔限制在 10-500ms,避免過短導致 CPU 佔用過高;
- 無人計時時長需為 30-180 分鐘且步長為 10 分鐘,符合設備協議要求;
- 靈敏度僅支持 0(低)、1(中)、2(高)三個枚舉值,避免非法配置。
示例代碼如下:
# 錯誤示例:掙扎靈敏度傳入3(僅支持0/1/2)
try:
device = R60ABD1(processor, struggle_sensitivity=3)
except ValueError as e:
print(e) # 輸出:struggle_sensitivity must be 0 (low), 1 (medium), or 2 (high)
同時進行異常機制與容錯設計:
- 自定義異常DeviceInitializationError:統一捕獲初始化失敗場景;
- 配置錯誤記錄:通過_configuration_errors列表追溯失敗項;
- 自動重試:關鍵操作(如設備復位、功能配置)支持自動重試。
# 自定義異常類
class DeviceInitializationError(Exception):
_"""設備初始化錯誤異常"""_
_ _pass
# 應用代碼示例
try:
device = R60ABD1(processor, parse_interval=300)
# 獲取初始化狀態與錯誤信息
init_status = device.get_configuration_status()
if init_status['initialization_complete']:
print("初始化成功!")
print(f"設備型號:{init_status['device_info']['product_model']}")
else:
print(f"初始化部分失敗,錯誤項:{init_status['configuration_errors']}")
except DeviceInitializationError as e:
print(f"初始化失敗:{e}")
# 輸出:Device initialization failed: Failed to load Product Model
優化後的初始化流程分為 5 個步驟,形成 “參數驗證 → 設備信息讀取 → 初始化等待 → 自動配置 → 配置驗證” 的閉環,示例流程如下:
def _complete_initialization(self):
start_time = time.ticks_ms()
# 步驟1:讀取設備信息(產品型號、ID等)
self._load_device_information()
# 步驟2:等待設備初始化,未完成則復位
if not self._wait_for_device_initialization():
self._reset_and_wait_for_initialization()
# 步驟3:自動配置功能(基於__init__參數)
self._auto_configure_device()
# 步驟4:驗證關鍵配置(如功能開關狀態)
self._verify_critical_configuration()
print(f"初始化耗時:{time.ticks_diff(time.ticks_ms(), start_time)}ms")
4.1.2 關鍵功能代碼解析
4.1.2.1 設備復位與初始化等待
當設備未完成初始化時,自動觸發復位流程,確保驅動恢復正常:
def _reset_and_wait_for_initialization(self):
# 發送復位指令(帶重試)
reset_success = self._execute_with_retry(self.reset_module, "Reset Device", timeout=1000)
if not reset_success:
return False
time.sleep(3) # 等待設備重啓
return self._wait_for_device_initialization(timeout=10000)
# 調用示例:在初始化中自動觸發
if not self._wait_for_device_initialization():
print("設備未初始化,嘗試復位...")
reset_success = self._reset_and_wait_for_initialization()
print(f"復位後初始化:{'成功' if reset_success else '失敗'}")
4.1.2.2 配置錯誤追溯
通過 get_configuration_status 方法獲取完整初始化狀態,便於問題定位:
# 調用示例:初始化後查詢狀態
init_status = device.get_configuration_status()
print(f"初始化完成:{init_status['initialization_complete']}")
print(f"錯誤列表:{init_status['configuration_errors']}")
# 輸出示例:
# 初始化完成:True
# 錯誤列表:["Failed to load Hardware Model", "Enable Abnormal Struggle Monitor failed"]
4.1.2.3 帶重試的操作執行
_execute_with_retry 方法為關鍵操作提供重試機制,提升成功率:
def _execute_with_retry(self, operation, operation_name, timeout=200):
for attempt in range(self.max_retries + 1):
try:
success, result = operation(timeout=timeout)
if success:
return True
if attempt < self.max_retries:
time.sleep_ms(self.retry_delay)
except Exception as e:
if attempt < self.max_retries:
time.sleep_ms(self.retry_delay)
else:
print(f"{operation_name}重試{self.max_retries+1}次失敗:{e}")
return False
# 調用示例:讀取產品型號(失敗自動重試3次)
success = self._execute_with_retry(self.query_product_model, "Load Product Model")
4.1.2 初始化部分完整代碼示例
完整代碼如下:
# 自定義異常類
class DeviceInitializationError(Exception):
_"""設備初始化錯誤異常"""_
_ _pass
def __init__(self, data_processor, parse_interval=200,
presence_enabled=True,
heart_rate_enabled=True, heart_rate_waveform_enabled=False,
breath_monitoring_enabled=True, breath_waveform_enabled=False,
sleep_monitoring_enabled=True,
abnormal_struggle_enabled=False, struggle_sensitivity=1,
no_person_timing_enabled=False, no_person_timing_duration=30,
sleep_cutoff_duration=120,
max_retries=3, retry_delay=100, init_timeout=5000):
_"""_
_ 初始化R60ABD1實例_
_ Args:_
_ data_processor: DataFlowProcessor實例_
_ parse_interval: 數據解析間隔,單位毫秒 (建議50-200ms)_
_ presence_enabled: 是否開啓人體存在信息監測_
_ heart_rate_enabled: 是否開啓心率監測_
_ heart_rate_waveform_enabled: 是否開啓心率波形主動上報_
_ breath_monitoring_enabled: 是否開啓呼吸監測_
_ breath_waveform_enabled: 是否開啓呼吸波形主動上報_
_ sleep_monitoring_enabled: 是否開啓睡眠監測_
_ abnormal_struggle_enabled: 是否開啓異常掙扎監測_
_ struggle_sensitivity: 掙扎靈敏度 (0=低, 1=中, 2=高)_
_ no_person_timing_enabled: 是否開啓無人計時功能_
_ no_person_timing_duration: 無人計時時長 (30-180分鐘)_
_ sleep_cutoff_duration: 睡眠截止時長 (5-120分鐘)_
_ max_retries: 最大重試次數_
_ retry_delay: 重試延遲時間,單位毫秒_
_ init_timeout: 初始化超時時間,單位毫秒_
_ Raises:_
_ ValueError: 參數驗證失敗_
_ DeviceInitializationError: 設備初始化失敗_
_ """_
_ _# 參數驗證
self._validate_init_parameters(
parse_interval, struggle_sensitivity, no_person_timing_duration,
sleep_cutoff_duration, max_retries, retry_delay, init_timeout
)
if parse_interval > 500:
raise ValueError("parse_interval must be less than 500ms")
self.data_processor = data_processor
self.parse_interval = parse_interval
self.max_retries = max_retries
self.retry_delay = retry_delay
self.init_timeout = init_timeout
# 添加運行狀態標誌
self._is_running = False
self._initialization_complete = False
self._configuration_errors = []
# ============================= 系統級屬性 ============================
# 心跳包監控
# 最後接收心跳包時間戳(ms)
self.heartbeat_last_received = 0
# 心跳超時累計次數
self.heartbeat_timeout_count = 0
# 實際心跳間隔統計(ms)
self.heartbeat_interval = 0
# 系統狀態
# 初始化完成狀態(True/False)
self.system_initialized = False
# 初始化完成時間戳(ms)
self.system_initialized_timestamp = 0
# 模組復位狀態標記
self.module_reset_flag = False
# 模組復位時間戳(ms)
self.module_reset_timestamp = 0
# 產品信息
# 產品型號(字符串)
self.product_model = ""
# 產品ID(字符串)
self.product_id = ""
# 硬件型號(字符串)
self.hardware_model = ""
# 固件版本(字符串)
self.firmware_version = ""
# ============================ 雷達探測屬性 ============================
# 位置狀態
# 是否在探測範圍內
self.radar_in_range = False
# =========================== 人體存在檢測屬性 ==========================
# 基本狀態
# 人體存在功能開關
self.presence_enabled = presence_enabled
# 存在狀態
# 0:無人, 1:有人
self.presence_status = 0
# 運動狀態
# 0:無, 1:靜止, 2:活躍
self.motion_status = 0
# 量化數據
# 體動參數(0-100)
self.movement_parameter = 0
# 人體距離(0-65535 cm)
self.human_distance = 0
# X座標(有符號)
self.human_position_x = 0
# Y座標(有符號)
self.human_position_y = 0
# Z座標(有符號)
self.human_position_z = 0
# ============================= 呼吸監測屬性 ===========================
# 功能配置
# 呼吸監測開關
self.breath_monitoring_enabled = breath_monitoring_enabled
# 呼吸波形上報開關
self.breath_waveform_enabled = False
# 低緩呼吸閾值(10-20次/min)
self.low_breath_threshold = 10
# 監測數據
# 1:正常, 2:過高, 3:過低, 4:無
self.breath_status = 0
# 呼吸數值(0-35次/分)
self.breath_value = 0
# 5個字節的波形數據
self.breath_waveform = [0, 0, 0, 0, 0]
# ============================= 心率監測屬性 ============================
# 功能配置
# 心率監測開關
self.heart_rate_enabled = heart_rate_enabled
# 心率波形上報開關
self.heart_rate_waveform_enabled = False
# 監測數據
# 心率數值(60-120)
self.heart_rate_value = 0
# 5個字節的波形數據
self.heart_rate_waveform = [0, 0, 0, 0, 0]
# ============================ 睡眠監測屬性 ============================
# 基礎狀態
# 睡眠監測開關
self.sleep_monitoring_enabled = sleep_monitoring_enabled
# 入牀/離牀狀態
# 0:離牀, 1:入牀, 2:無
self.bed_status = 0
# 睡眠狀態
# 0:深睡, 1:淺睡, 2:清醒, 3:無
self.sleep_status = 0
# 時長統計
# 清醒時長(分鐘)
self.awake_duration = 0
# 淺睡時長(分鐘)
self.light_sleep_duration = 0
# 深睡時長(分鐘)
self.deep_sleep_duration = 0
# 睡眠質量
# 睡眠質量評分(0-100)
self.sleep_quality_score = 0
# 睡眠質量評級
self.sleep_quality_rating = 0
# 綜合狀態
# 包含8個字段的字典
self.sleep_comprehensive_status = {}
# 睡眠異常狀態
self.sleep_anomaly = 0
# 異常掙扎狀態
self.abnormal_struggle_status = 0
# 無人計時狀態
self.no_person_timing_status = 0
# 配置參數
# 異常掙扎開關
self.abnormal_struggle_enabled = abnormal_struggle_enabled
# 無人計時開關
self.no_person_timing_enabled = no_person_timing_enabled
# 無人計時時長
self.no_person_timing_duration = no_person_timing_duration
# 睡眠截止時長
self.sleep_cutoff_duration = sleep_cutoff_duration
# 掙扎靈敏度
self.struggle_sensitivity = struggle_sensitivity
# 查詢狀態管理
# 是否有查詢在進行中
self._query_in_progress = False
# 是否收到查詢響應
self._query_response_received = False
# 查詢結果
self._query_result = None
# 當前查詢類型
self._current_query_type = None
# 默認查詢超時時間(ms)
self._query_timeout = 200
# 內部使用的定時器
self._timer = Timer(-1)
try:
# 啓動定時器
self._start_timer()
# 執行完整的初始化流程
self._complete_initialization()
self._initialization_complete = True
if R60ABD1.DEBUG_ENABLED:
print(f"[Init] R60ABD1 initialized successfully")
status = self.get_configuration_status()
print(f"[Init] Configuration errors: {len(status['configuration_errors'])}")
print(f"[Init] Product: {self.product_model} v{self.firmware_version}")
except Exception as e:
# 初始化失敗,停止定時器
self._is_running = False
if hasattr(self, '_timer'):
self._timer.deinit()
raise DeviceInitializationError(f"Device initialization failed: {str(e)}")
def _validate_init_parameters(self, parse_interval, struggle_sensitivity,
no_person_timing_duration, sleep_cutoff_duration,
max_retries, retry_delay, init_timeout):
_"""驗證初始化參數"""_
_ _if parse_interval > 500 or parse_interval < 10:
raise ValueError("parse_interval must be between 10ms and 500ms")
if struggle_sensitivity not in [self.SENSITIVITY_LOW, self.SENSITIVITY_MEDIUM, self.SENSITIVITY_HIGH]:
raise ValueError("struggle_sensitivity must be 0 (low), 1 (medium), or 2 (high)")
if no_person_timing_duration < 30 or no_person_timing_duration > 180 or no_person_timing_duration % 10 != 0:
raise ValueError("no_person_timing_duration must be between 30-180 minutes in steps of 10")
if sleep_cutoff_duration < 5 or sleep_cutoff_duration > 120:
raise ValueError("sleep_cutoff_duration must be between 5-120 minutes")
if max_retries < 0 or max_retries > 10:
raise ValueError("max_retries must be between 0 and 10")
if retry_delay < 0 or retry_delay > 1000:
raise ValueError("retry_delay must be between 0ms and 1000ms")
if init_timeout < 1000 or init_timeout > 30000:
raise ValueError("init_timeout must be between 1000ms and 30000ms")
def _complete_initialization(self):
_"""_
_ 完整的初始化流程_
_ Raises:_
_ DeviceInitializationError: 初始化失敗_
_ """_
_ _start_time = time.ticks_ms()
# 步驟1: 讀取設備基本信息
device_info_loaded = self._load_device_information()
if not device_info_loaded:
raise DeviceInitializationError("Failed to load device information")
# 步驟2: 檢查並等待設備初始化完成
init_success = self._wait_for_device_initialization()
if not init_success:
# 嘗試重啓設備
if R60ABD1.DEBUG_ENABLED:
print("[Init] Device not initialized, attempting reset...")
reset_success = self._reset_and_wait_for_initialization()
if not reset_success:
raise DeviceInitializationError("Device initialization failed even after reset")
# 步驟3: 配置設備功能
self._auto_configure_device()
# 步驟4: 驗證關鍵功能配置
self._verify_critical_configuration()
elapsed_time = time.ticks_diff(time.ticks_ms(), start_time)
if R60ABD1.DEBUG_ENABLED:
print(f"[Init] Initialization completed in {elapsed_time}ms")
def _load_device_information(self):
_"""_
_ 加載設備基本信息_
_ Returns:_
_ bool: 是否成功加載所有設備信息_
_ """_
_ _info_queries = [
("Product Model", self.query_product_model),
("Product ID", self.query_product_id),
("Hardware Model", self.query_hardware_model),
("Firmware Version", self.query_firmware_version)
]
all_success = True
for info_name, query_func in info_queries:
success = self._execute_with_retry(query_func, f"Load {info_name}")
if not success:
all_success = False
self._configuration_errors.append(f"Failed to load {info_name}")
if R60ABD1.DEBUG_ENABLED:
print(f"[Init] Warning: Failed to load {info_name}")
return all_success
def _wait_for_device_initialization(self, timeout=None):
_"""_
_ 等待設備初始化完成_
_ Args:_
_ timeout: 超時時間,單位毫秒_
_ Returns:_
_ bool: 設備是否初始化完成_
_ """_
_ _if timeout is None:
timeout = self.init_timeout
start_time = time.ticks_ms()
while time.ticks_diff(time.ticks_ms(), start_time) < timeout:
success, init_status = self.query_init_complete(timeout=500)
if success and init_status:
if R60ABD1.DEBUG_ENABLED:
print("[Init] Device initialization confirmed")
return True
# 短暫延遲後重試
time.sleep_ms(200)
if R60ABD1.DEBUG_ENABLED:
print("[Init] Device initialization timeout")
return False
def _reset_and_wait_for_initialization(self):
_"""_
_ 重置設備並等待初始化完成_
_ Returns:_
_ bool: 重置和初始化是否成功_
_ """_
_ _# 發送復位指令
reset_success = self._execute_with_retry(
self.reset_module,
"Reset Device",
timeout=1000
)
if not reset_success:
return False
# 等待3秒讓設備重啓
if R60ABD1.DEBUG_ENABLED:
print("[Init] Waiting 3 seconds for device reset...")
time.sleep(3)
# 重新等待初始化完成
return self._wait_for_device_initialization(timeout=10000) # 10秒超時
def _auto_configure_device(self):
_"""_
_ 自動配置設備功能_
_ """_
_ _configuration_steps = []
# 基礎功能配置
if self.presence_enabled:
configuration_steps.append(("Enable Human Presence", self.enable_human_presence))
else:
configuration_steps.append(("Disable Human Presence", self.disable_human_presence))
# 心率監測配置
if self.heart_rate_enabled:
configuration_steps.append(("Enable Heart Rate Monitor", self.enable_heart_rate_monitor))
if self.heart_rate_waveform_enabled:
configuration_steps.append(
("Enable Heart Rate Waveform Report", self.enable_heart_rate_waveform_report))
else:
configuration_steps.append(
("Disable Heart Rate Waveform Report", self.disable_heart_rate_waveform_report))
else:
configuration_steps.append(("Disable Heart Rate Monitor", self.disable_heart_rate_monitor))
# 呼吸監測配置
if self.breath_monitoring_enabled:
configuration_steps.append(("Enable Breath Monitor", self.enable_breath_monitor))
if self.breath_waveform_enabled:
configuration_steps.append(("Enable Breath Waveform Report", self.enable_breath_waveform_report))
else:
configuration_steps.append(("Disable Breath Waveform Report", self.disable_breath_waveform_report))
else:
configuration_steps.append(("Disable Breath Monitor", self.disable_breath_monitor))
# 睡眠監測配置
if self.sleep_monitoring_enabled:
configuration_steps.append(("Enable Sleep Monitor", self.enable_sleep_monitor))
# 異常掙扎配置
if self.abnormal_struggle_enabled:
configuration_steps.append(("Enable Abnormal Struggle Monitor", self.enable_abnormal_struggle_monitor))
# 設置掙扎靈敏度
configuration_steps.append(("Set Struggle Sensitivity",
lambda: self.set_struggle_sensitivity(self.struggle_sensitivity)))
else:
configuration_steps.append(
("Disable Abnormal Struggle Monitor", self.disable_abnormal_struggle_monitor))
# 無人計時配置
if self.no_person_timing_enabled:
configuration_steps.append(("Enable No Person Timing", self.enable_no_person_timing))
# 設置無人計時時長
configuration_steps.append(("Set No Person Timing Duration",
lambda: self.set_no_person_timing_duration(self.no_person_timing_duration)))
else:
configuration_steps.append(("Disable No Person Timing", self.disable_no_person_timing))
# 設置睡眠截止時長
configuration_steps.append(("Set Sleep End Duration",
lambda: self.set_sleep_end_duration(self.sleep_cutoff_duration)))
else:
configuration_steps.append(("Disable Sleep Monitor", self.disable_sleep_monitor))
# 執行配置步驟
for step_name, step_function in configuration_steps:
success = self._execute_with_retry(step_function, step_name)
if not success:
self._configuration_errors.append(f"Failed to {step_name}")
if R60ABD1.DEBUG_ENABLED:
print(f"[Init] Warning: {step_name} failed")
def _verify_critical_configuration(self):
_"""_
_ 驗證關鍵配置是否成功_
_ """_
_ _critical_verifications = []
# 驗證設備初始化狀態
critical_verifications.append(("Device Initialization", self.query_init_complete))
# 驗證雷達範圍狀態
critical_verifications.append(("Radar Range", self.query_radar_range_boundary))
# 根據啓用的功能添加驗證
if self.presence_enabled:
critical_verifications.append(("Presence Detection", self.query_human_presence_switch))
if self.heart_rate_enabled:
critical_verifications.append(("Heart Rate Monitor", self.query_heart_rate_monitor_switch))
if self.breath_monitoring_enabled:
critical_verifications.append(("Breath Monitor", self.query_breath_monitor_switch))
if self.sleep_monitoring_enabled:
critical_verifications.append(("Sleep Monitor", self.query_sleep_monitor_switch))
# 執行驗證
for verify_name, verify_func in critical_verifications:
success, result = verify_func(timeout=500)
if not success:
self._configuration_errors.append(f"Verification failed: {verify_name}")
if R60ABD1.DEBUG_ENABLED:
print(f"[Init] Warning: {verify_name} verification failed")
def _execute_with_retry(self, operation, operation_name, timeout=200):
_"""_
_ 帶重試的執行操作_
_ """_
_ _for attempt in range(self.max_retries + 1):
try:
success, result = operation(timeout=timeout)
if success:
return True
if attempt < self.max_retries:
time.sleep_ms(self.retry_delay)
except Exception as e:
if attempt < self.max_retries:
time.sleep_ms(self.retry_delay)
else:
if R60ABD1.DEBUG_ENABLED:
print(f"[Init] {operation_name} failed after {self.max_retries + 1} attempts: {e}")
return False
def get_configuration_status(self):
_"""_
_ 獲取設備配置狀態_
_ """_
_ _return {
'initialization_complete': self._initialization_complete,
'configuration_errors': self._configuration_errors.copy(),
'device_info': {
'product_model': self.product_model,
'product_id': self.product_id,
'hardware_model': self.hardware_model,
'firmware_version': self.firmware_version
},
'current_settings': {
'presence_enabled': self.presence_enabled,
'heart_rate_enabled': self.heart_rate_enabled,
'heart_rate_waveform_enabled': self.heart_rate_waveform_enabled,
'breath_monitoring_enabled': self.breath_monitoring_enabled,
'breath_waveform_enabled': self.breath_waveform_enabled,
'sleep_monitoring_enabled': self.sleep_monitoring_enabled,
'abnormal_struggle_enabled': self.abnormal_struggle_enabled,
'struggle_sensitivity': self.struggle_sensitivity,
'no_person_timing_enabled': self.no_person_timing_enabled,
'no_person_timing_duration': self.no_person_timing_duration,
'sleep_cutoff_duration': self.sleep_cutoff_duration
}
}
完整步驟如下:
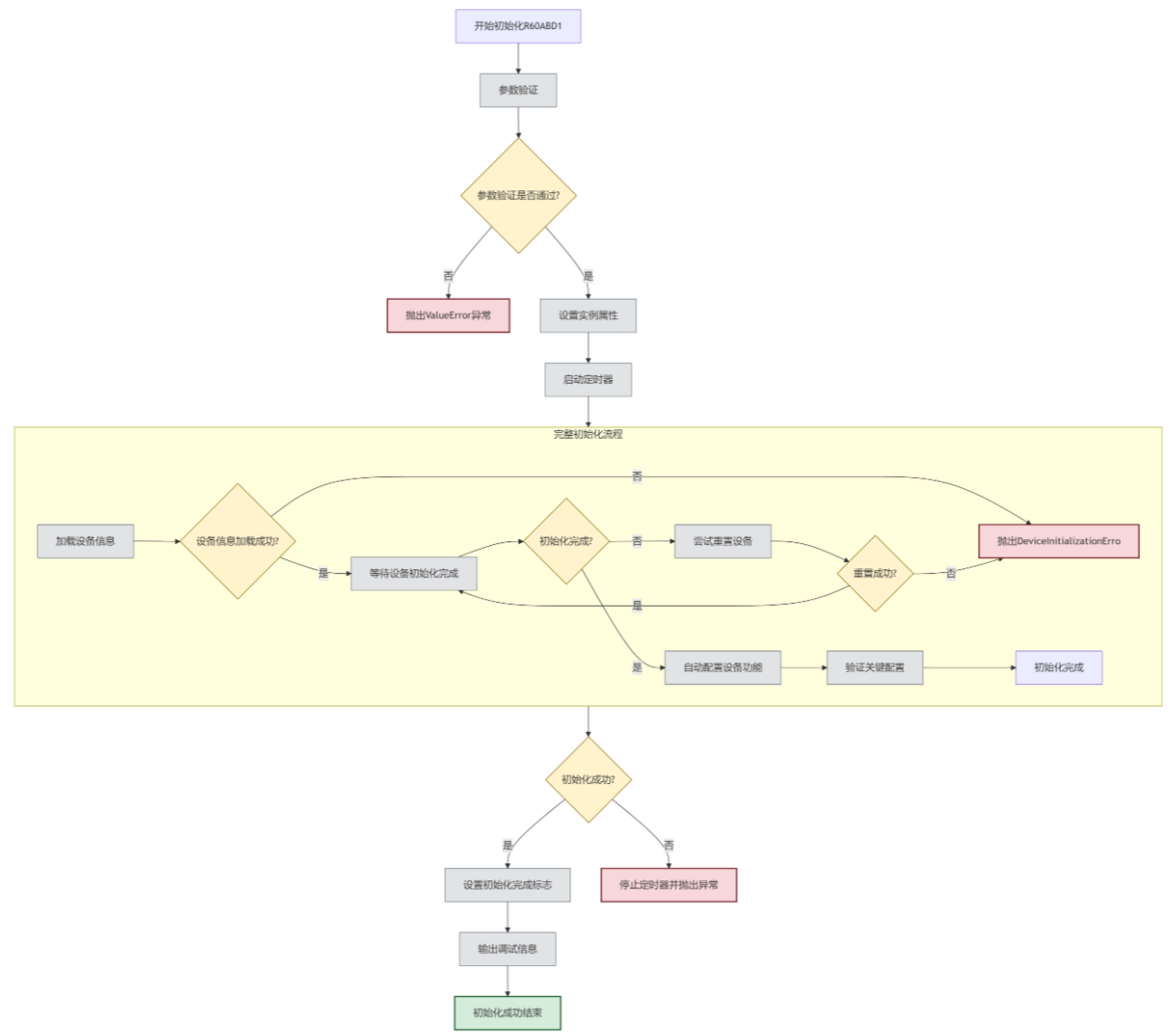
4.2 測試腳本:全功能覆蓋與快速驗證
main.py 作為配套測試腳本,實現 “初始化驗證、功能測試、數據監控” 三大核心功能,示例代碼覆蓋關鍵測試場景,便於開發者快速驗證驅動可靠性。
4.2.1 測試驅動庫的核心維度與實現方式
驅動庫的測試需覆蓋 “初始化 → 功能調用 → 數據交互 → 資源釋放” 全生命週期,結合 main.py 代碼,具體測試維度與實現如下:
4.2.2.1 設備復位與初始化等待
初始化是驅動庫運行的基礎,需驗證 “參數合法性校驗、設備通信正常性、配置項生效性”。
# 初始化配置代碼片段(來自main.py)
uart = UART(0, baudrate=115200, tx=Pin(16), rx=Pin(17), timeout=0)
processor = DataFlowProcessor(uart)
# 嘗試創建驅動實例(觸發參數校驗與初始化流程)
try:
device = R60ABD1(processor, parse_interval=200)
print("驅動實例創建成功")
except ValueError as e:
print(f"參數校驗失敗:{e}") # 驗證參數合法性(如parse_interval超限)
except DeviceInitializationError as e:
print(f"初始化失敗:{e}") # 驗證設備通信/配置異常處理
# 驗證設備基礎信息讀取(初始化關鍵步驟)
success, product_model = device.query_product_model()
assert success, "產品型號查詢失敗,初始化異常"
print(f"產品型號:{product_model}") # 驗證設備信息讀取正確
4.2.2.2 功能接口測試:覆蓋查詢、控制、配置全類型接口
驅動庫的核心價值在於提供可靠的功能接口,需按 “查詢類 → 控制類 → 配置類” 分類測試,確保每個接口的輸入輸出符合預期。
- 查詢類接口測試(獲取設備狀態 / 數據)
查詢類接口(如 query_human_distance、query_heart_rate_value)需驗證 “是否能正確返回設備數據”,失敗時是否返回 (False, None)。
# 主動查詢數據測試(來自main.py的print_active_query_data函數核心邏輯)
def test_query_interfaces():
# 測試人體距離查詢
success, distance = device.query_human_distance(timeout=200)
if success:
assert isinstance(distance, int) and 0 <= distance <= 65535, "距離值範圍異常"
print(f"人體距離查詢成功:{distance}cm")
else:
print("人體距離查詢失敗(可能設備未檢測到目標)")
# 測試心率查詢
success, heart_rate = device.query_heart_rate_value(timeout=200)
if success:
assert isinstance(heart_rate, int) and 0 <= heart_rate <= 200, "心率值範圍異常"
print(f"心率查詢成功:{heart_rate}bpm")
else:
print("心率查詢失敗(可能未開啓心率監測)")
test_query_interfaces()
測試要點如下:
- 成功時返回值類型與範圍是否符合文檔(如距離為 0-65535cm 的整數);
- 失敗時
success是否為False,result是否為None; - 接口是否兼容超時參數(如
timeout=200時超過 200ms 未響應則返回失敗)。
- 控制類接口測試(開關功能)
控制類接口(如 enable_human_presence、enable_sleep_monitor)需驗證 “是否能正確控制設備功能”,且狀態變更能通過查詢接口確認。
def test_control_interfaces():
# 測試開啓人體存在監測
success, _ = device.enable_human_presence()
assert success, "開啓人體存在監測失敗"
# 驗證功能是否生效(通過查詢接口確認)
success, status = device.query_human_presence_switch()
assert success and status is True, "人體存在監測未實際開啓"
print("人體存在監測開啓成功並驗證通過")
# 測試關閉人體存在監測
success, _ = device.disable_human_presence()
assert success, "關閉人體存在監測失敗"
success, status = device.query_human_presence_switch()
assert success and status is False, "人體存在監測未實際關閉"
print("人體存在監測關閉成功並驗證通過")
test_control_interfaces()
測試要點如下:
- 控制指令發送成功後,通過對應查詢接口(例如
query_human_presence_switch)驗證狀態是否實際變更; - 控制失敗時(如設備不支持該功能),
success是否為False。
- 配置類接口測試(調整參數)
配置類接口(如 set_struggle_sensitivity、set_no_person_timing_duration)需驗證 “參數是否能正確寫入設備”,且查詢時返回配置值。
def test_config_interfaces():
# 測試設置掙扎靈敏度為中等(1)
target_sensitivity = 1
success, _ = device.set_struggle_sensitivity(target_sensitivity)
assert success, "設置掙扎靈敏度失敗"
# 驗證配置是否生效
success, sensitivity = device.query_struggle_sensitivity()
assert success and sensitivity == target_sensitivity, "掙扎靈敏度配置未生效"
print(f"掙扎靈敏度設置為{target_sensitivity}(中等)並驗證通過")
# 測試設置無人計時時長為60分鐘
target_duration = 60
success, _ = device.set_no_person_timing_duration(target_duration)
assert success, "設置無人計時時長失敗"
success, duration = device.query_no_person_timing_duration()
assert success and duration == target_duration, "無人計時時長配置未生效"
print(f"無人計時時長設置為{target_duration}分鐘並驗證通過")
test_config_interfaces()
測試要點如下:
- 配置參數需在合法範圍內(如掙扎靈敏度僅支持 0/1/2),超出範圍時是否返回失敗;
- 配置成功後,通過查詢接口驗證返回值與配置值一致。
4.2.2.3 實時數據監控測試:驗證主動上報與屬性同步
設備會主動上報實時數據(如心率波形、呼吸狀態),需驗證驅動庫的 update_properties_from_frame 方法是否能正確解析並更新屬性。
# 實時上報數據監控(來自main.py的核心邏輯)
def test_realtime_data():
last_print = time.ticks_ms()
print_interval = 2000 # 每2秒打印一次實時屬性
try:
while time.ticks_diff(time.ticks_ms(), last_print) < 10000: # 監控10秒
current = time.ticks_ms()
if time.ticks_diff(current, last_print) >= print_interval:
# 打印驅動類屬性(驗證主動上報數據是否同步)
print(f"\n實時屬性({time.strftime('%H:%M:%S')}):")
print(f"存在狀態:{'有人' if device.presence_status == 1 else '無人'}")
print(f"呼吸頻率:{device.breath_value}bpm")
print(f"心率波形:{device.heart_rate_waveform}")
last_print = current
time.sleep_ms(10)
except KeyboardInterrupt:
pass
test_realtime_data()
測試要點如下:
- 驅動類屬性(如
presence_status、breath_value)是否隨設備上報數據實時更新; - 波形數據(如
heart_rate_waveform)的長度與格式是否符合協議(如 5 字節列表)。
4.2.2 測試腳本完整代碼示例
# Python env : MicroPython v1.23.0
# -*- coding: utf-8 -*-
# @Time : 2025/11/4 下午5:33
# @Author : 李清水
# @File : main.py
# @Description : 測試R60ABD1雷達設備驅動類的代碼
# @License : CC BY-NC 4.0
# ======================================== 導入相關模塊 =========================================
from machine import UART, Pin, Timer
import time
from data_flow_processor import DataFlowProcessor
from r60abd1 import R60ABD1, format_time
# ======================================== 全局變量 ============================================
# 上次打印時間
last_print_time = time.ticks_ms()
# 定時打印間隔:2秒打印一次
print_interval = 2000
# ======================================== 功能函數 ============================================
def print_report_sensor_data():
_"""打印傳感器數據到Thonny控制枱"""_
_ _# 聲明全局變量
global device
print("=" * 50)
print("%s Sensor Data" % format_time())
print("=" * 50)
# 心率數據
print("Report Heart Rate: %d bpm" % device.heart_rate_value)
print("Report Heart Rate Waveform: %s" % str(device.heart_rate_waveform))
# 呼吸數據
print("Report Breath Rate: %d bpm" % device.breath_value)
print("Report Breath Status: %d" % device.breath_status)
print("Report Breath Waveform: %s" % str(device.breath_waveform))
# 人體存在數據
print("Report Movement Parameter: %d" % device.movement_parameter)
print("Report Presence Status: %s" % ("Someone" if device.presence_status == 1 else "No one"))
print("Report Motion Status: %s" % ["No motion", "Static", "Active"][
device.motion_status] if device.motion_status < 3 else "Unknown")
# 距離和位置
print("Report Human Distance: %d cm" % device.human_distance)
print("Report Human Position: X=%d, Y=%d, Z=%d" % (
device.human_position_x, device.human_position_y, device.human_position_z))
# 雷達狀態
print("Report Radar in Range: %s" % ("Yes" if device.radar_in_range else "No"))
print("=" * 50)
def print_active_query_data(timeout=200):
_"""_
_ 主動查詢並打印傳感器數據(阻塞式查詢)_
_ """_
_ _# 聲明全局變量
global device
print("=" * 50)
print("%s Active Query Sensor Data" % format_time())
print("=" * 50)
# 查詢人體方位
success, direction_data = device.query_human_direction(timeout)
if success:
x, y, z = direction_data
print("Query Human Position: X=%d, Y=%d, Z=%d" % (x, y, z))
else:
print("Query Human Position: Failed")
time.sleep(0.5)
# 查詢人體距離
success, distance = device.query_human_distance(timeout)
if success:
print("Query Human Distance: %d cm" % distance)
else:
print("Query Human Distance: Failed")
time.sleep(0.5)
# 查詢運動信息
success, motion_status = device.query_human_motion_info(timeout)
if success:
motion_text = ["No motion", "Static", "Active"][motion_status] if motion_status < 3 else "Unknown"
print("Query Motion Status: %s" % motion_text)
else:
print("Query Motion Status: Failed")
time.sleep(0.5)
# 查詢體動參數
success, motion_param = device.query_human_body_motion_param(timeout)
if success:
print("Query Movement Parameter: %d" % motion_param)
else:
print("Query Movement Parameter: Failed")
time.sleep(0.5)
# 查詢存在狀態
success, presence_status = device.query_presence_status(timeout)
if success:
status_text = "Someone" if presence_status == 1 else "No one"
print("Query Presence Status: %s" % status_text)
else:
print("Query Presence Status: Failed")
time.sleep(0.5)
# 查詢心率數值
success, heart_rate = device.query_heart_rate_value(timeout)
if success:
print("Query Heart Rate: %d bpm" % heart_rate)
else:
print("Query Heart Rate: Failed")
time.sleep(0.5)
# 查詢心率波形
success, heart_rate_waveform = device.query_heart_rate_waveform(timeout)
if success:
print("Query Heart Rate Waveform: %s" % str(heart_rate_waveform))
else:
print("Query Heart Rate Waveform: Failed")
time.sleep(0.5)
# 查詢呼吸數值
success, breath_rate = device.query_breath_value(timeout)
if success:
print("Query Breath Rate: %d bpm" % breath_rate)
else:
print("Query Breath Rate: Failed")
time.sleep(0.5)
# 查詢呼吸波形
success, breath_waveform = device.query_breath_waveform(timeout)
if success:
print("Query Breath Waveform: %s" % str(breath_waveform))
else:
print("Query Breath Waveform: Failed")
time.sleep(0.5)
# 查詢呼吸信息
success, breath_info = device.query_breath_info(timeout)
if success:
status_text = ["Normal", "High", "Low", "None"][breath_info - 1] if 1 <= breath_info <= 4 else "Unknown"
print("Query Breath Info: %d - %s" % (breath_info, status_text))
else:
print("Query Breath Info: Failed")
time.sleep(0.5)
# 查詢牀狀態
success, bed_status = device.query_bed_status(timeout)
if success:
status_text = ["Leave bed", "Enter bed", "None"][bed_status] if bed_status < 3 else "Unknown"
print("Query Bed Status: %d - %s" % (bed_status, status_text))
else:
print("Query Bed Status: Failed")
time.sleep(0.5)
# 查詢無人計時狀態
success, no_person_timing_status = device.query_no_person_timing_status(timeout)
if success:
status_text = ["None", "Normal", "Abnormal"][
no_person_timing_status] if no_person_timing_status < 3 else "Unknown"
print("Query No Person Timing Status: %d - %s" % (no_person_timing_status, status_text))
else:
print("Query No Person Timing Status: Failed")
time.sleep(0.5)
# 查詢睡眠狀態
success, sleep_status = device.query_sleep_status(timeout)
if success:
status_text = ["Deep sleep", "Light sleep", "Awake", "None"][sleep_status] if sleep_status < 4 else "Unknown"
print("Query Sleep Status: %d - %s" % (sleep_status, status_text))
else:
print("Query Sleep Status: Failed")
time.sleep(0.5)
# 查詢清醒時長
success, awake_duration = device.query_awake_duration(timeout)
if success:
print("Query Awake Duration: %d min" % awake_duration)
else:
print("Query Awake Duration: Failed")
time.sleep(0.5)
# 查詢淺睡時長
success, light_sleep_duration = device.query_light_sleep_duration(timeout)
if success:
print("Query Light Sleep Duration: %d min" % light_sleep_duration)
else:
print("Query Light Sleep Duration: Failed")
time.sleep(0.5)
# 查詢深睡時長
success, deep_sleep_duration = device.query_deep_sleep_duration(timeout)
if success:
print("Query Deep Sleep Duration: %d min" % deep_sleep_duration)
else:
print("Query Deep Sleep Duration: Failed")
time.sleep(0.5)
# 查詢睡眠質量評分
success, sleep_quality_score = device.query_sleep_quality_score(timeout)
if success:
print("Query Sleep Quality Score: %d/100" % sleep_quality_score)
else:
print("Query Sleep Quality Score: Failed")
time.sleep(0.5)
# 查詢睡眠綜合狀態
success, sleep_comprehensive_status = device.query_sleep_comprehensive_status(timeout)
if success:
print("Query Sleep Comprehensive Status: Success")
# 可以進一步解析和顯示詳細數據
if len(sleep_comprehensive_status) >= 8:
print(" - Presence: %s" % ("Someone" if sleep_comprehensive_status[0] == 1 else "No one"))
print(" - Sleep Status: %s" % ["Deep sleep", "Light sleep", "Awake", "None"][sleep_comprehensive_status[1]] if sleep_comprehensive_status[1] < 4 else "Unknown")
print(" - Avg Breath: %d bpm" % sleep_comprehensive_status[2])
print(" - Avg Heart Rate: %d bpm" % sleep_comprehensive_status[3])
print(" - Turnover Count: %d" % sleep_comprehensive_status[4])
print(" - Large Movement Ratio: %d%%" % sleep_comprehensive_status[5])
print(" - Small Movement Ratio: %d%%" % sleep_comprehensive_status[6])
print(" - Apnea Count: %d" % sleep_comprehensive_status[7])
else:
print("Query Sleep Comprehensive Status: Failed")
time.sleep(0.5)
# 查詢睡眠異常
success, sleep_anomaly = device.query_sleep_anomaly(timeout)
if success:
status_text = ["Short sleep (<4h)", "Long sleep (>12h)", "No person anomaly", "Normal"][sleep_anomaly] if sleep_anomaly < 4 else "Unknown"
print("Query Sleep Anomaly: %d - %s" % (sleep_anomaly, status_text))
else:
print("Query Sleep Anomaly: Failed")
time.sleep(0.5)
# 查詢睡眠統計
success, sleep_statistics = device.query_sleep_statistics(timeout)
if success:
print("Query Sleep Statistics: Success")
# 可以進一步解析和顯示詳細數據
if len(sleep_statistics) >= 11:
print(" - Quality Score: %d/100" % sleep_statistics[0])
print(" - Total Sleep Duration: %d min" % sleep_statistics[1])
print(" - Awake Ratio: %d%%" % sleep_statistics[2])
print(" - Light Sleep Ratio: %d%%" % sleep_statistics[3])
print(" - Deep Sleep Ratio: %d%%" % sleep_statistics[4])
print(" - Leave Bed Duration: %d min" % sleep_statistics[5])
print(" - Leave Bed Count: %d" % sleep_statistics[6])
print(" - Turnover Count: %d" % sleep_statistics[7])
print(" - Avg Breath: %d bpm" % sleep_statistics[8])
print(" - Avg Heart Rate: %d bpm" % sleep_statistics[9])
print(" - Apnea Count: %d" % sleep_statistics[10])
else:
print("Query Sleep Statistics: Failed")
time.sleep(0.5)
# 查詢睡眠質量評級
success, sleep_quality_level = device.query_sleep_quality_level(timeout)
if success:
status_text = ["None", "Good", "Normal", "Poor"][sleep_quality_level] if sleep_quality_level < 4 else "Unknown"
print("Query Sleep Quality Level: %d - %s" % (sleep_quality_level, status_text))
else:
print("Query Sleep Quality Level: Failed")
print("=" * 50)
# ======================================== 自定義類 ============================================
# ======================================== 初始化配置 ==========================================
# 上電延時
time.sleep(3)
# 打印調試信息
print("FreakStudio: Using R60ABD1 millimeter wave information collection")
# 初始化UART0:TX=16, RX=17,波特率115200
uart = UART(0, baudrate=115200, tx=Pin(16), rx=Pin(17), timeout=0)
# 創建DataFlowProcessor實例
processor = DataFlowProcessor(uart)
# 創建R60ABD1實例
device = R60ABD1(processor, parse_interval=200)
success, product_model = device.query_product_model()
if success:
print("Product Model: %s" % product_model)
else:
print("Query Product Model failed")
time.sleep(0.5)
success, product_id = device.query_product_id()
if success:
print("Product ID: %s" % product_id)
else:
print("Query Product ID failed")
time.sleep(0.5)
success, hardware_model = device.query_hardware_model()
if success:
print("Hardware Model: %s" % hardware_model)
else:
print("Query Hardware Model failed")
time.sleep(0.5)
success, firmware_version = device.query_firmware_version()
if success:
print("Hardware Version: %s" % firmware_version)
else:
print("Query Hardware Version failed")
time.sleep(0.5)
success, init_status = device.query_init_complete()
if success:
print("Init Status: %s" % init_status)
else:
print("Query Init Status failed")
time.sleep(0.5)
success, boundary_status = device.query_radar_range_boundary()
if success:
status_text = "out of range" if boundary_status else "in range"
print("Boundary Status: %s" % status_text)
else:
print("Query Boundary Status failed")
time.sleep(0.5)
success, presence_switch_status = device.query_human_presence_switch()
if success:
status_text = "ON" if presence_switch_status else "OFF"
print("Boundary Status: %s" % status_text)
else:
print("Query Boundary Status failed")
time.sleep(0.5)
success, heart_rate_monitor_switch_status = device.query_heart_rate_monitor_switch()
if success:
status_text = "ON" if heart_rate_monitor_switch_status else "OFF"
print("Heart Rate Monitor Switch: %s" % status_text)
else:
print("Query Heart Rate Monitor Switch failed")
time.sleep(0.5)
success, heart_rate_waveform_report_switch_status = device.query_heart_rate_waveform_report_switch()
if success:
status_text = "ON" if heart_rate_waveform_report_switch_status else "OFF"
print("Heart Rate Waveform Report Switch: %s" % status_text)
else:
print("Query Heart Rate Waveform Report Switch failed")
time.sleep(0.5)
# 查詢呼吸監測開關狀態
success, breath_monitor_switch_status = device.query_breath_monitor_switch()
if success:
status_text = "ON" if breath_monitor_switch_status else "OFF"
print("Breath Monitor Switch: %s" % status_text)
else:
print("Query Breath Monitor Switch failed")
time.sleep(0.5)
# 設置低緩呼吸閾值為15次/分
success, set_result = device.set_low_breath_threshold(15)
if success:
print("Set Low Breath Threshold: Success (15 bpm)")
else:
print("Set Low Breath Threshold failed")
time.sleep(0.5)
# 查詢當前低緩呼吸閾值
success, low_breath_threshold = device.query_low_breath_threshold()
if success:
print("Query Low Breath Threshold: %d bpm" % low_breath_threshold)
else:
print("Query Low Breath Threshold failed")
time.sleep(0.5)
# 查詢呼吸波形上報開關狀態
success, breath_waveform_report_switch_status = device.query_breath_waveform_report_switch()
if success:
status_text = "ON" if breath_waveform_report_switch_status else "OFF"
print("Breath Waveform Report Switch: %s" % status_text)
else:
print("Query Breath Waveform Report Switch failed")
# 查詢睡眠監測開關狀態
success, sleep_monitor_switch_status = device.query_sleep_monitor_switch()
if success:
status_text = "ON" if sleep_monitor_switch_status else "OFF"
print("Sleep Monitor Switch: %s" % status_text)
else:
print("Query Sleep Monitor Switch failed")
time.sleep(0.5)
# 打開睡眠監測功能
success, result = device.enable_sleep_monitor()
if success:
print("Enable Sleep Monitor: Success")
else:
print("Enable Sleep Monitor failed")
time.sleep(0.5)
# 查詢異常掙扎監測開關狀態
success, abnormal_struggle_switch_status = device.query_abnormal_struggle_switch()
if success:
status_text = "ON" if abnormal_struggle_switch_status else "OFF"
print("Abnormal Struggle Monitor Switch: %s" % status_text)
else:
print("Query Abnormal Struggle Monitor Switch failed")
time.sleep(0.5)
# 打開異常掙扎監測功能
success, result = device.enable_abnormal_struggle_monitor()
if success:
print("Enable Abnormal Struggle Monitor: Success")
else:
print("Enable Abnormal Struggle Monitor failed")
time.sleep(0.5)
# 查詢掙扎靈敏度
success, struggle_sensitivity = device.query_struggle_sensitivity()
if success:
sensitivity_text = ["Low", "Medium", "High"][struggle_sensitivity] if struggle_sensitivity < 3 else "Unknown"
print("Struggle Sensitivity: %d - %s" % (struggle_sensitivity, sensitivity_text))
else:
print("Query Struggle Sensitivity failed")
time.sleep(0.5)
# 設置掙扎靈敏度為中等
success, result = device.set_struggle_sensitivity(1) # 1 = 中等靈敏度
if success:
print("Set Struggle Sensitivity: Success (Medium)")
else:
print("Set Struggle Sensitivity failed")
time.sleep(0.5)
# 查詢無人計時功能開關狀態
success, no_person_timing_switch_status = device.query_no_person_timing_switch()
if success:
status_text = "ON" if no_person_timing_switch_status else "OFF"
print("No Person Timing Switch: %s" % status_text)
else:
print("Query No Person Timing Switch failed")
time.sleep(0.5)
# 打開無人計時功能
success, result = device.enable_no_person_timing()
if success:
print("Enable No Person Timing: Success")
else:
print("Enable No Person Timing failed")
time.sleep(0.5)
# 查詢無人計時時長
success, no_person_timing_duration = device.query_no_person_timing_duration()
if success:
print("No Person Timing Duration: %d minutes" % no_person_timing_duration)
else:
print("Query No Person Timing Duration failed")
time.sleep(0.5)
# 設置無人計時時長為30分鐘
success, result = device.set_no_person_timing_duration(30)
if success:
print("Set No Person Timing Duration: Success (30 minutes)")
else:
print("Set No Person Timing Duration failed")
time.sleep(0.5)
# 查詢睡眠截止時長
success, sleep_end_duration = device.query_sleep_end_duration()
if success:
print("Sleep End Duration: %d minutes" % sleep_end_duration)
else:
print("Query Sleep End Duration failed")
time.sleep(0.5)
# 設置睡眠截止時長為10分鐘
success, result = device.set_sleep_end_duration(10)
if success:
print("Set Sleep End Duration: Success (10 minutes)")
else:
print("Set Sleep End Duration failed")
time.sleep(0.5)
# ======================================== 主程序 ===========================================
try:
while True:
current_time = time.ticks_ms()
# 定期打印傳感器數據
if time.ticks_diff(current_time, last_print_time) >= print_interval:
# print_report_sensor_data()
success, presence_status = device.query_presence_status()
if success:
print("Presence Status: %s" % ("Someone" if presence_status == 1 else "No one"))
else:
print("Query Presence Status failed")
last_print_time = current_time
time.sleep(0.2)
success, heartbeat_status = device.query_heartbeat()
if success:
print("Heartbeat Status: %s" % ("Normal" if heartbeat_status == 1 else "Abnormal"))
else:
print("Query Heartbeat failed")
# 小延遲,避免佔用太多CPU
time.sleep_ms(10)
except KeyboardInterrupt:
print("%s Program interrupted by user" % format_time())
finally:
# 清理資源
print("%s Cleaning up resources..." % format_time())
# 停止實例運行
device.close()
# 銷燬實例
del device
print("%s Program exited" % format_time())
4.3 性能測試與系統資源分析
性能測試的核心目標是驗證驅動庫在嵌入式環境(如樹莓派 Pico)中的資源佔用合理性、實時性與穩定性,確保其能長期可靠運行且不影響系統其他功能。
嵌入式系統(如樹莓派 Pico)的 CPU、內存資源有限,驅動庫的性能缺陷可能導致:
- 系統卡頓:CPU佔用過高,導致其他任務(如網絡通信、用户交互)響應延遲;
- 數據丟失:解析間隔不合理或處理時間過長,導致設備上報數據未及時處理;
- 穩定性下降:長時間高負載運行可能引發內存泄漏、定時器異常等問題;
- 實時性不足:健康監測、異常告警等場景對數據更新延遲敏感,性能不達標會影響功能有效性。
基於驅動庫的特性,需重點關注以下指標:
- 核心方法執行時間:
update_properties_from_frame是驅動庫解析設備數據的核心方法,其執行時間直接影響CPU佔用。- 指標定義:單次解析設備數據幀的耗時(單位:ms);
- 關鍵值:
- 平均值:反映長期運行的平均負載;
- 最大值:反映最壞情況下的負載峯值;
- 分佈範圍:是否存在頻繁的長尾延遲(如偶爾超過 1ms)。
- 實時性:設備數據的更新延遲需滿足業務場景需求。
- 指標定義:從設備上報數據到驅動庫屬性更新的時間差;
- 影響因素:解析間隔(
parse_interval)和update_properties_from_frame執行時間。
- 穩定性(長時間運行表現):驅動庫需能穩定運行至少 24 小時,無內存泄漏、功能退化等問題。
- 指標定義:
- 內存佔用變化:是否隨時間持續增長;
- 功能有效性:長時間運行後,查詢 / 控制接口是否仍能正常工作;
- 異常重啓次數:是否因性能問題導致系統重啓。
- 指標定義:
這裏,我們主要測試不同數據解析週期情況下 update_properties_from_frame 方法的解析時間,這裏調節不同數據解析週期,就是調節“定時器間隔” 即 parse_interval 參數(單位:毫秒):驅動庫會通過定時器,每隔 parse_interval 毫秒自動調用 update_properties_from_frame 方法,從設備讀取最新的傳感器數據(如心率、呼吸波形、人體存在狀態等)並解析更新到屬性中。
例如:
parse_interval=50表示每 50 毫秒解析一次數據;parse_interval=200表示每 200 毫秒解析一次數據。
傳感器數據(如心率波動、人體運動狀態)是動態變化的,定時器間隔決定了驅動庫採集這些變化的靈敏度:
- 間隔過短(如 50ms):每 50ms 更新一次數據,能快速捕捉微小變化(如心率瞬間升高、人體輕微移動),適合對實時性要求高的場景(如異常掙扎監測);
- 間隔過長(如 200ms):數據更新延遲增加,可能錯過短時間內的關鍵變化(如突發的呼吸暫停),但能降低資源消耗。
同時,設備會持續向驅動庫發送數據幀,這些數據會先暫存在緩衝區中:
- 間隔過短(如 50ms):緩衝區數據尚未積累就被處理,單次處理的數據量少(可能僅 1-2 幀),但頻繁調用可能導致 “處理 - 等待” 的低效循環;
- 間隔過長(如 200ms):緩衝區可能積累多幀數據(如 4-5 幀),單次處理的數據量增加,可能導致單次執行時間延長(如從 0.2ms 增至 0.6ms),但調用頻率降低,總體資源佔用更優。
為精準量化 update_properties_from_frame 方法的執行耗時,我們在該方法上應用了計時裝飾器:
# 計時裝飾器,用於計算函數運行時間
def timed_function(f: callable, *args: tuple, **kwargs: dict) -> callable:
_"""_
_ 計時裝飾器,用於計算並打印函數/方法運行時間。_
_ Args:_
_ f (callable): 需要傳入的函數/方法_
_ args (tuple): 函數/方法 f 傳入的任意數量的位置參數_
_ kwargs (dict): 函數/方法 f 傳入的任意數量的關鍵字參數_
_ Returns:_
_ callable: 返回計時後的函數_
_ """_
_ _myname = str(f).split(' ')[1]
def new_func(*args: tuple, **kwargs: dict) -> any:
t: int = time.ticks_us()
result = f(*args, **kwargs)
delta: int = time.ticks_diff(time.ticks_us(), t)
print('Function {} Time = {:6.3f}ms'.format(myname, delta / 1000))
return result
return new_func
timed_function 裝飾器的核心邏輯是在方法調用前後記錄時間戳,計算差值並轉換為毫秒單位打印。將其應用於 update_properties_from_frame 後,每次解析設備數據幀時,都會輸出類似如下的耗時日誌:
Function update_properties_from_frame Time = 0.287ms
Function update_properties_from_frame Time = 0.164ms
Function update_properties_from_frame Time = 0.625ms
...
通過採集大量日誌數據,我們對 50ms、100ms、200ms 三種典型解析間隔下的性能指標進行了統計分析。
定時器間隔為:50 ms 時測試結果如下:
定時器間隔為:100 ms 時測試結果如下:
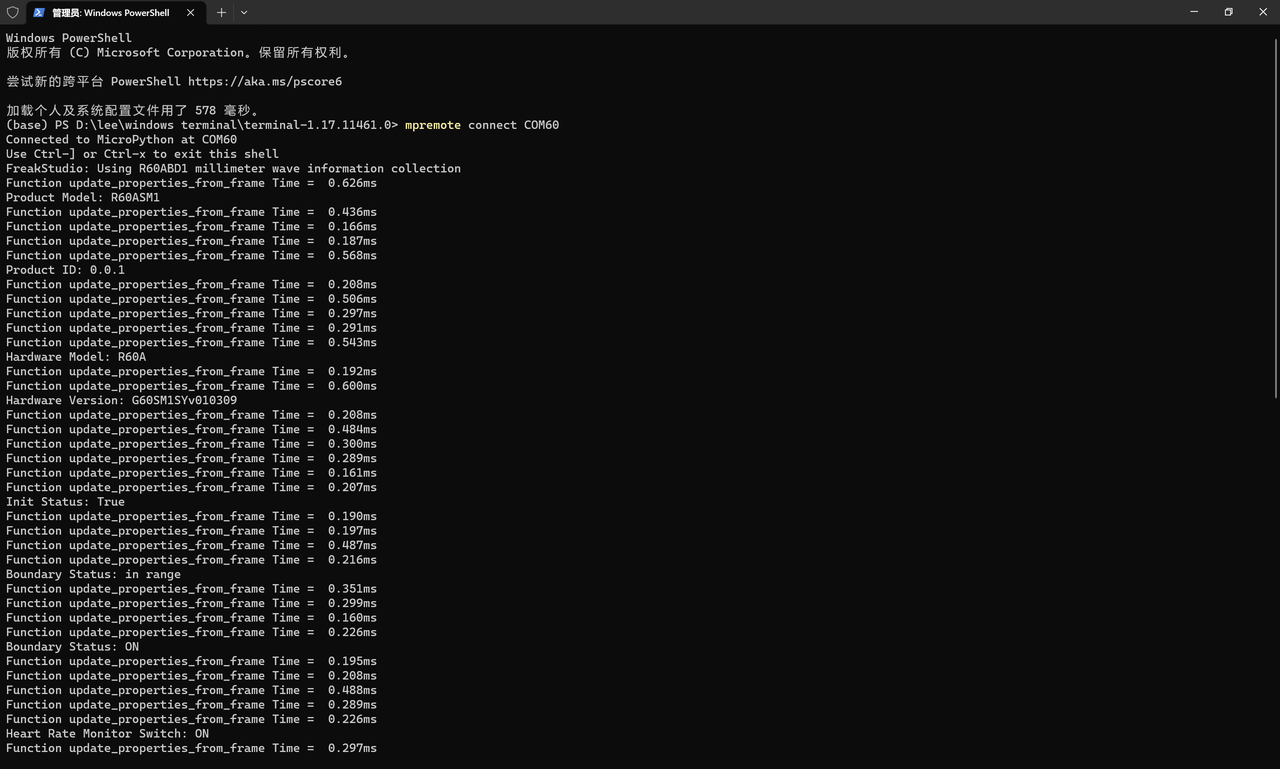
定時器間隔為:200 ms 時測試結果如下:
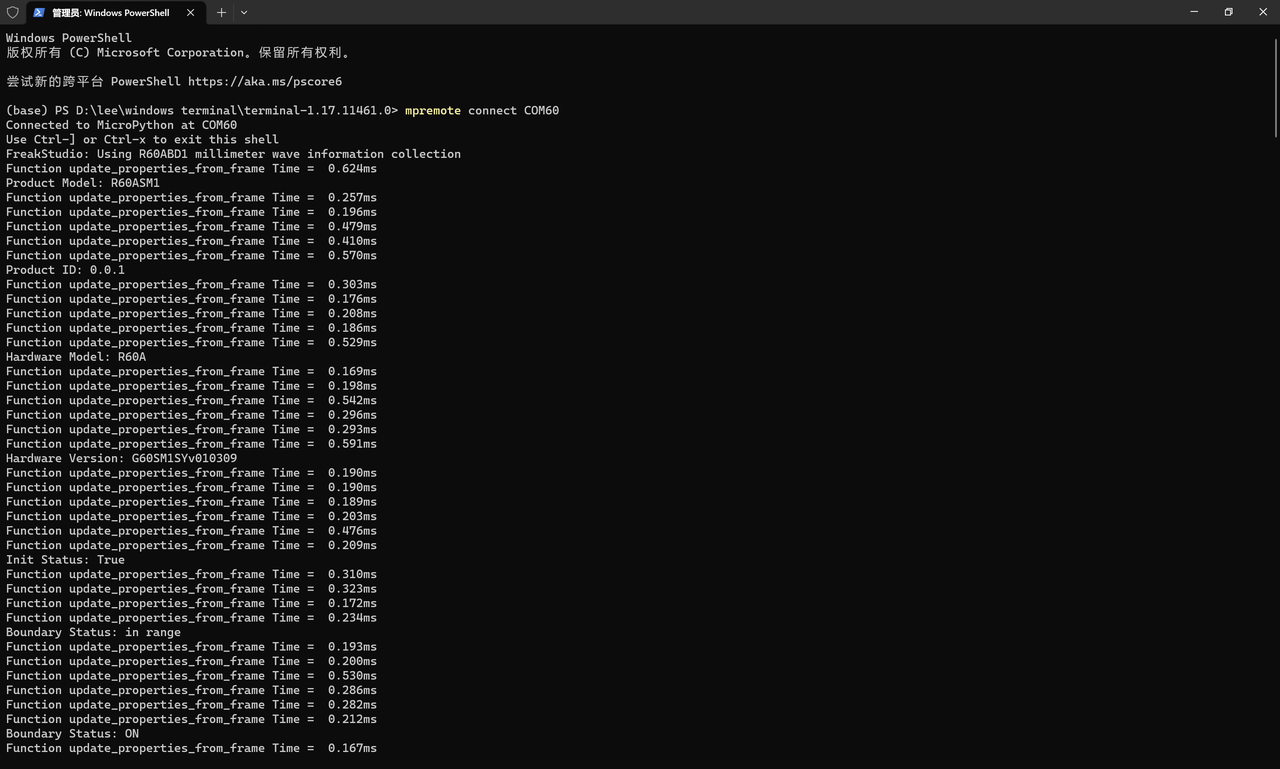
不同數據解析測試結果如下所示:
五、附件資料與源碼鏈接
內部固件可看:
https://f1829ryac0m.feishu.cn/docx/O1trdIGMEocKh2xRX7QcGTLxnNd?from=from_copylink
源碼鏈接:
https://github.com/FreakStudioCN/GraftSense-Drivers-MicroPython/blob/main/sensors/r60abd1_driver/code
![image]()
關於我們更多介紹可以查看雲文檔:Freak 嵌入式工作室雲文檔,或者訪問我們的 wiki:https://github.com/leezisheng/Doc/wik
