國地中心聯合緯鈦機器人發佈了全球首個最大規模的跨本體視觸覺(Vision-Based Tactile Sensor)多模態數據集:白虎-VTouch。該數據集首創跨本體視觸覺多模態真實交互數據採集新範式,是目前全球規模最大、模態最完整、任務結構最系統化的視觸覺多模態機器人操作數據集。
包含視觸覺傳感器數據、RGB-D數據、關節位姿數據等,涵蓋輪臂機器人(D-Wheel)、雙足機器人(青龍)、手持智能終端等本體構型,數據集規模超60000分鐘。白虎-VTouch數據集的使用説明、相關研究成果Pre-print預印本也將陸續發佈。
主要特點
- 數據集涵蓋多個模態,包含視觸覺傳感器數據、RGB-D數據、關節位姿數據等。
- 涵蓋了多款機器人本體,包括國地中心青龍、國地中心輪臂、手持式pika夾爪。這些平台涵蓋了全尺寸人形機器人、類人形輪式機器人以及手持式智能終端多種本體構型。
- 使用“矩陣式”任務構建方法,圍繞家居家政、餐飲服務、工業製造、特種作業四大類真實場景,涵蓋100+原子技能,全面覆蓋機器人在現實生活和生產中的關鍵應用領域
白虎-VTouch數據集所採用的視觸覺傳感器支持最高640×480分辨率與120Hz刷新率,在物體接觸過程可穩定記錄細粒度接觸變化,包含視觸覺接觸圖像約9072萬對真實物體接觸樣本。視觸覺接觸數據佔本數據集規模的比重為57%,顯著擴展了真實物理交互場景的接觸範圍。
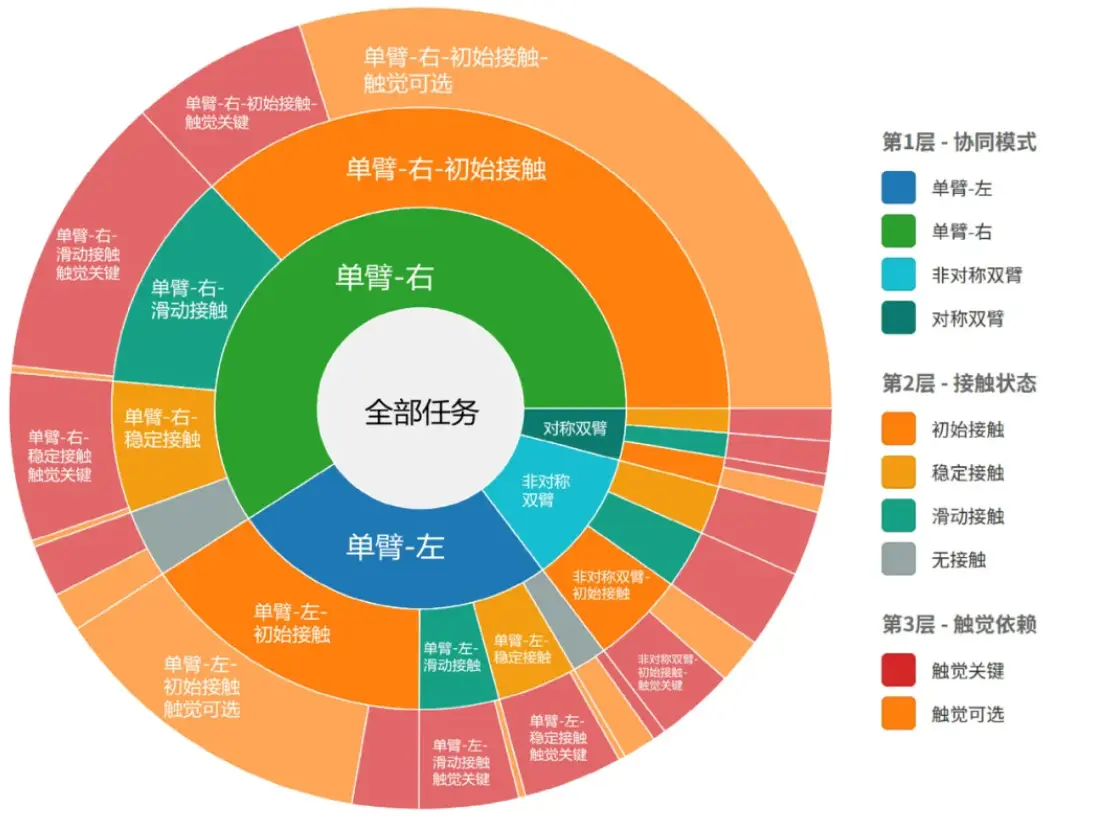
在任務層面,視觸覺信息重點覆蓋260+接觸密集型任務,其中,68%的任務在引入視觸覺感知後獲得了更完整、連續的接觸狀態描述,為精細操作、力控調整與失敗恢復等關鍵環節提供了直接增益。
